人形机器人反应式脚步规划和运动控制方法及系统
- 国知局
- 2024-08-01 00:16:57
本发明属于机器人扰动控制,尤其涉及人形机器人反应式脚步规划和运动控制方法及系统。
背景技术:
1、人形机器人根据人类指令提供各种服务并执行复杂任务的能力是基础且至关重要的。它们最基本但最重要的特征是即使在存在不同类型的干扰的情况下,也能够用两条腿稳定行走。为了实现这一功能,必须实施简单、有效且实用的控制策略。
2、人形机器人在步行过程中,不可避免地会受到各种外部扰动的影响,如何实现人形机器人在外部扰动下的稳定行走,对于它们的实际应用具有非常重要的意义。从已公开的一些仿真以及实验结果来看,人形机器人目前抗扰动能力依然较弱,鲁棒性仍然较差,很容易发生失稳摔倒。
3、公开号为cn116500892a的专利中,阐述了一种基于线性倒立摆的落脚点规划方法,但是对于外部扰动无法消除,鲁棒性较差。公开号为cn103042525b的专利中,提出了一种确定仿人机器人的抗扰动能力的方法,这种方法只能估计扰动大小,对于扰动消除方法没有介绍。公开号为cn111230868b的专利中,提出了一种外部推力扰动时的步态规划与控制方法,对机器人支撑脚踝关节俯仰自由度施加力矩来对抗扰动,但是精确控制踝关节力矩是非常困难的,需要仔细调节反馈增益和力矩限定器以克服由于过大的踝关节力矩引起的脚尖或脚跟的跳动。“nao仿人机器人步态规划及扰动平衡控制研究”中,提出了一种静态平衡的髋关节策略抵抗扰动的方法,无法对于运动中的扰动抵抗产生作用。
4、目前人形机器人处理外部推力扰动下的步态规划与控制问题时,通常假设外部推力信息已知或者可测量,然而实际情况下人形机器人的外部扰动很难估计出一个准确值。所以,根据不准确的外部扰动估计难以实施精准的脚步补偿,以实现对于外部扰动的消除。
技术实现思路
1、为克服上述现有技术的不足,本发明提供了人形机器人反应式脚步规划和运动控制方法及系统,设计了一种基于线性倒立摆模型(lipm)基本运动的反应式足迹补偿策略,利用线性倒立摆模型(lipm)的周期性运动特性,根据模型稳定性恢复的条件得到正确的足迹补偿,增强了仿人机器人运动对抗外部干扰的鲁棒性。
2、为实现上述目的,本发明的一个或多个实施例提供了如下技术方案:
3、本发明第一方面提供了人形机器人反应式脚步规划和运动控制方法。
4、人形机器人反应式脚步规划和运动控制方法,包括以下步骤:
5、获取外部控制速度,计算人形机器人运动步长和方向;
6、建立人形机器人线性倒立摆模型,基于线性倒立摆模型的周期性运动特性和轨迹能量守恒,结合扰动后线性倒立摆模型稳定性恢复的条件,得到扰动后人形机器人的足迹补偿;
7、基于人形机器人运动步长和方向、结合足迹补偿,生成人形机器人的多个立足点,基于多个立足点,得到参考零力矩点规划轨迹;
8、基于参考零力矩点规划轨迹,结合人形机器人反馈的零力矩点规划轨迹,预测期望零力矩点规划轨迹;
9、基于期望零力矩点规划轨迹,结合逆运动学,得到人形机器人各个关节所需的关节角度,对扰动后的人形机器人进行运动控制。
10、本发明第二方面提供了人形机器人反应式脚步规划和运动控制系统。
11、人形机器人反应式脚步规划和运动控制系统,包括:
12、步长和方向计算模块,被配置为:获取外部控制速度,计算人形机器人运动步长和方向;
13、足迹补偿模块,被配置为:建立人形机器人线性倒立摆模型,基于线性倒立摆模型的周期性运动特性和轨迹能量守恒,结合扰动后线性倒立摆模型稳定性恢复的条件,得到扰动后人形机器人的足迹补偿;
14、参考零力矩点规划轨迹计算模块,被配置为:基于人形机器人运动步长和方向、结合足迹补偿,生成人形机器人的多个立足点,基于多个立足点,得到参考零力矩点规划轨迹;
15、期望零力矩点规划轨迹计算模块,被配置为:基于参考零力矩点规划轨迹,结合人形机器人反馈的零力矩点规划轨迹,预测期望零力矩点规划轨迹;
16、关节角度计算模块,被配置为:基于期望零力矩点规划轨迹,结合逆运动学,得到人形机器人各个关节所需的关节角度,对扰动后的人形机器人进行运动控制。
17、本发明第三方面提供了计算机可读存储介质,其上存储有程序,该程序被处理器执行时实现如本发明第一方面所述的人形机器人反应式脚步规划和运动控制方法中的步骤。
18、本发明第四方面提供了电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的程序,所述处理器执行所述程序时实现如本发明第一方面所述的人形机器人反应式脚步规划和运动控制方法中的步骤。
19、以上一个或多个技术方案存在以下有益效果:
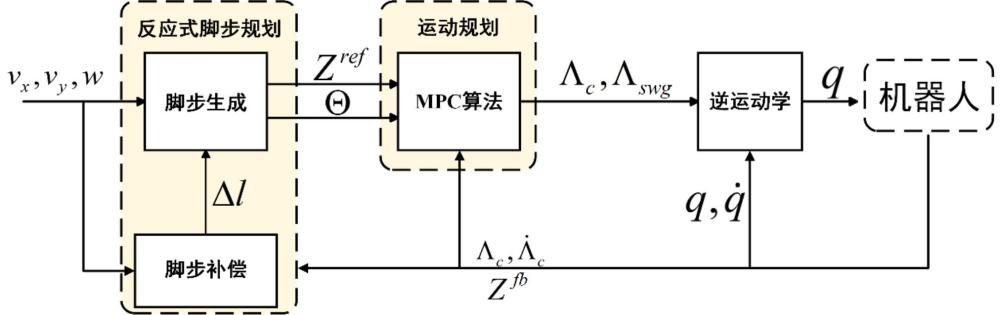
20、本发明提供了一种人形机器人反应式脚步规划和运动控制方法及系统,通过反应式脚步规划和运动控制框架,在反应式脚步规划模块中,提出了一种基于线性倒立摆模型(lipm)基本运动的反应式足迹补偿策略,该策略利用线性倒立摆模型(lipm)的周期性运动特性,根据模型稳定性恢复的条件导出正确的足迹补偿,并根据足迹补偿生成零力矩点(zmp)规划轨迹;在运动优化模块中,基于反应式脚步规划进行运动优化。本发明通过上述过程,增强了仿人机器人运动对抗外部干扰的鲁棒性。
21、本发明设计了一种扰动后人形机器人的足迹补偿策略,基于在没有扰动的情况下、当人形机器人支撑点不变时,线性倒立摆模型的轨迹能量守恒,计算得到人形机器人的换脚速度;当人形机器人质心在运动过程中受到扰动时,切换支撑脚时质心的位置和速度会发生变化,同时,扰动后下一个脚步点的位置也发生改变,基于扰动后线性倒立摆模型稳定性恢复条件,基于人形机器人的换脚速度,计算得到足迹补偿。
22、本发明附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:1.人形机器人反应式脚步规划和运动控制方法,其特征在于,包括以下步骤:
2.如权利要求1所述的人形机器人反应式脚步规划和运动控制方法,其特征在于,所述人形机器人运动步长和方向,具体为:
3.如权利要求2所述的人形机器人反应式脚步规划和运动控制方法,其特征在于,扰动后人形机器人的足迹补偿,具体计算过程为:
4.如权利要求3所述的人形机器人反应式脚步规划和运动控制方法,其特征在于:
5.如权利要求4所述的人形机器人反应式脚步规划和运动控制方法,其特征在于,设步骤的立足点定义为,则:
6.如权利要求1所述的人形机器人反应式脚步规划和运动控制方法,其特征在于,基于人形机器人线性倒立摆模型的状态方程,构建代价函数并求解最佳落足点,得到期望零力矩点规划轨迹,代价函数具体为:
7.如权利要求1所述的人形机器人反应式脚步规划和运动控制方法,其特征在于:
8.人形机器人反应式脚步规划和运动控制系统,其特征在于,包括:
9.计算机可读存储介质,其上存储有程序,其特征在于,该程序被处理器执行时实现如权利要求1-7任一项所述的人形机器人反应式脚步规划和运动控制方法中的步骤。
10.电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的程序,其特征在于,所述处理器执行所述程序时实现如权利要求1-7任一项所述的人形机器人反应式脚步规划和运动控制方法中的步骤。
技术总结本发明提出了人形机器人反应式脚步规划和运动控制方法及系统,涉及机器人扰动控制技术领域。包括获取外部控制速度,计算人形机器人运动步长和方向;建立人形机器人线性倒立摆模型,得到扰动后人形机器人的足迹补偿;基于人形机器人运动步长和方向、结合足迹补偿,生成人形机器人的多个立足点,基于多个立足点,得到参考零力矩点规划轨迹;基于参考零力矩点规划轨迹,结合人形机器人反馈的零力矩点规划轨迹,预测期望零力矩点规划轨迹;基于期望零力矩点规划轨迹,结合逆运动学,得到人形机器人各个关节所需的关节角度,对扰动后的人形机器人进行运动控制。本发明增强了仿人机器人运动对抗外部干扰的鲁棒性。技术研发人员:张国腾,谯立超,朱玮良,秦道岭,宋锐,李贻斌受保护的技术使用者:山东大学技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240730/200430.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表