基于摔倒判断的人形机器人步态控制方法和装置
- 国知局
- 2024-07-31 23:50:19
本发明涉及机器人控制,尤其涉及一种基于摔倒判断的人形机器人步态控制方法和装置。
背景技术:
1、双足人形机器人具有灵活的行走能力,能适应各种地形,具备较强的越障能力,这些优点使人形机器人能更好的适应未知环境,并自主完成一些工作。然而,目前的人形机器人存在一定的硬件误差,当环境复杂时,人形机器人的抗干扰能力较差,易出现摔倒或行走不稳的情况。
技术实现思路
1、本发明提供一种基于摔倒判断的人形机器人步态控制方法和装置,用以解决现有技术中识别游客身份的精度较低的问题。
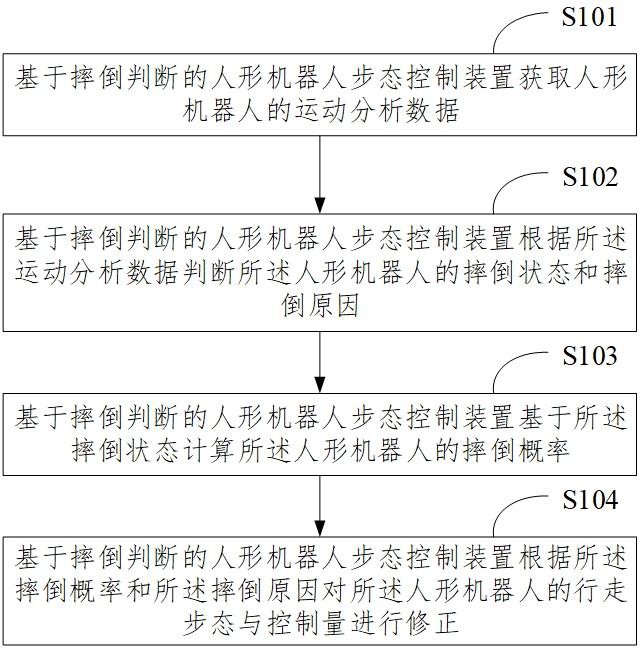
2、本发明提供一种基于摔倒判断的人形机器人步态控制方法,包括:获取人形机器人的运动分析数据;根据所述运动分析数据判断所述人形机器人的摔倒状态和摔倒原因,所述摔倒状态包括稳定行走、临界摔倒和摔倒,所述摔倒原因包括环境干扰和硬件误差;基于所述摔倒状态计算所述人形机器人的摔倒概率;根据所述摔倒概率和所述摔倒原因对所述人形机器人的行走步态与控制量进行修正。
3、根据本发明提供一种基于摔倒判断的人形机器人步态控制方法,所述基于所述摔倒状态计算所述人形机器人的摔倒概率,包括:根据上一时刻的预警信号累积量和计算因子确定当前时刻的预警信号累积量,不同的摔倒状态对应不同的计算因子;根据公式计算所述人形机器人的摔倒概率; 其中,表示预警信号累积量,表示滑动窗口的步长。
4、根据本发明提供一种基于摔倒判断的人形机器人步态控制方法,所述根据上一时刻的预警信号累积量和计算因子确定当前时刻的预警信号累积量,包括:
5、根据公式确定当前时刻的预警信号累积量;
6、其中,表示摔倒状态为稳定行走,表示摔倒状态为临界摔倒,表示摔倒状态为摔倒,预警信号累积量的初始值为0,表示摔倒状态“稳定行走”对应的计算因子,表示摔倒状态“临界摔倒”对应的计算因子,表示摔倒状态“摔倒”对应的计算因子。
7、根据本发明提供一种基于摔倒判断的人形机器人步态控制方法,所述根据所述摔倒概率和所述摔倒原因对所述人形机器人的行走步态与控制量进行修正,包括:基于预设常数调整所述人形机器人的步态参数,所述步态参数包括以下至少一种:步频、步幅、抬腿高度以及两脚宽度。
8、根据本发明提供一种基于摔倒判断的人形机器人步态控制方法,所述控制量包括落脚点坐标;所述根据所述摔倒概率和所述摔倒原因对所述人形机器人的行走步态与控制量进行修正,包括:根据以下公式确定调整后的所述人形机器人的落脚点坐标:
9、;
10、其中,x表示所述人形机器人的前进方向,y表示所述人形机器人的竖直方向,、和表示所述人形机器人的机身姿态角,、和表示所述人形机器人的角速度,、和表示所述人形机器人的期望姿态角,、、、、、、以及表示调节参数,表示根据所述调节参数计算得到的期望落脚点坐标。
11、根据本发明提供一种基于摔倒判断的人形机器人步态控制方法,所述获取人形机器人的运动分析数据,包括:采集所述人形机器人的基础运动数据,所述基础运动数据包括但不限于:主动关节位置、被动关节位置、关节速度、三维姿态角、质心位置、质心速度、质心加速度;对所述基础运动数据进行预处理操作,所述预处理操作包括降噪处理和降维处理;计算每个基础运动数据的运动分析数据,所述运动分析数据包括以下至少一项:均值、方差、偏度、峭度、均方根、方根幅值、整流平均值、峰峰值、波形因子、峰值因子以及裕度因子。
12、根据本发明提供一种基于摔倒判断的人形机器人步态控制方法,所述根据所述摔倒概率和所述摔倒原因对所述人形机器人的行走步态与控制量进行修正,包括:确定所述摔倒概率对应的阈值区间;根据所述阈值区间和摔倒原因确定所述控制量的修正方案;其中,一个阈值区间对应一个修正方案,摔倒概率越大对应的修正方案的调整量越大。
13、本发明还提供一种基于摔倒判断的人形机器人步态控制装置,包括:获取模块和处理模块;所述获取模块,用于获取人形机器人的运动分析数据;所述处理模块,用于根据所述运动分析数据判断所述人形机器人的摔倒状态和摔倒原因,所述摔倒状态包括稳定行走、临界摔倒和摔倒,所述摔倒原因包括环境干扰和硬件误差;基于所述摔倒状态计算所述人形机器人的摔倒概率;根据所述摔倒概率和所述摔倒原因对所述人形机器人的行走步态与控制量进行修正。
14、根据本发明提供一种基于摔倒判断的人形机器人步态控制装置,所述处理模块用于:根据上一时刻的预警信号累积量和计算因子确定当前时刻的预警信号累积量,不同的摔倒状态对应不同的计算因子;根据公式计算所述人形机器人的摔倒概率; 其中,表示预警信号累积量,表示滑动窗口的步长。
15、根据本发明提供一种基于摔倒判断的人形机器人步态控制装置,所述处理模块用于:
16、根据公式确定当前时刻的预警信号累积量;
17、其中,表示摔倒状态为稳定行走,表示摔倒状态为临界摔倒,表示摔倒状态为摔倒,预警信号累积量的初始值为0,表示摔倒状态“稳定行走”对应的计算因子,表示摔倒状态“临界摔倒”对应的计算因子,表示摔倒状态“摔倒”对应的计算因子。
18、根据本发明提供一种基于摔倒判断的人形机器人步态控制装置,所述处理模块用于:基于预设常数调整所述人形机器人的步态参数,所述步态参数包括以下至少一种:步频、步幅、抬腿高度以及两脚宽度。
19、根据本发明提供一种基于摔倒判断的人形机器人步态控制装置,所述控制量包括落脚点坐标;所述处理模块用于:根据以下公式确定调整后的所述人形机器人的落脚点坐标:
20、;
21、其中,x表示所述人形机器人的前进方向,y表示所述人形机器人的竖直方向,、和表示所述人形机器人的机身姿态角,、和表示所述人形机器人的角速度,、和表示所述人形机器人的期望姿态角,、、、、、、以及表示调节参数,表示根据所述调节参数计算得到的期望落脚点坐标。
22、根据本发明提供一种基于摔倒判断的人形机器人步态控制装置,所述获取模块用于:采集所述人形机器人的基础运动数据,所述基础运动数据包括但不限于:主动关节位置、被动关节位置、关节速度、三维姿态角、质心位置、质心速度、质心加速度;对所述基础运动数据进行预处理操作,所述预处理操作包括降噪处理和降维处理;计算每个基础运动数据的运动分析数据,所述运动分析数据包括以下至少一项:均值、方差、偏度、峭度、均方根、方根幅值、整流平均值、峰峰值、波形因子、峰值因子以及裕度因子。
23、根据本发明提供一种基于摔倒判断的人形机器人步态控制装置,所述处理模块用于:确定所述摔倒概率对应的阈值区间;根据所述阈值区间和所述摔倒原因确定所述控制量的修正方案;其中,一个阈值区间对应一个修正方案,摔倒概率越大对应的修正方案的调整量越大,所述摔倒原因包括环境干扰和硬件误差。
24、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述基于摔倒判断的人形机器人步态控制方法的步骤。
25、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述基于摔倒判断的人形机器人步态控制方法的步骤。
26、本发明提供的基于摔倒判断的人形机器人步态控制方法和装置,可以获取人形机器人的运动分析数据;根据所述运动分析数据判断所述人形机器人的摔倒状态和摔倒原因,所述摔倒状态包括稳定行走、临界摔倒和摔倒,所述摔倒原因包括环境干扰和硬件误差;基于所述摔倒状态计算所述人形机器人的摔倒概率;根据所述摔倒概率和所述摔倒原因对所述人形机器人的行走步态与控制量进行修正。通过该方案,可以根据运动分析数据判断人形机器人的摔倒状态和摔倒原因,并基于摔倒状态计算摔倒概率,以及根据摔倒概率和摔倒原因从人形机器人的行走步态与控制量两方面进行修正,由于可以对人形机器人的行走步态进行修正,因此可以提升人形机器人对外部环境的抗干扰能力,由于可以对人形机器人的控制量进行修正,因此可以对人形机器人的落脚点计算进行补偿,从而弥补人形机器人硬件性能的不足。进而降低人形机器人出现摔倒或行走不稳现象的概率。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198762.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表