一种基于NB-IOT的适用于机械操纵杆的遥操作装置
- 国知局
- 2024-07-31 23:50:10
本技术公开一种控制装置,具体来说,是一种基于nb-iot的适用于机械操纵杆的遥操作装置。
背景技术:
1、目前,大型农业装备加紧部署于家庭农场、农机合作社及龙头企业,自动导航、无人驾驶技术的应用大幅提升了农业装备自动化和信息化水平。但是,中小型农机,如中小型拖拉机、手扶式旋耕机,在小规模、小面积,及山地丘陵地带的应用和个体农户设备购置中仍然占有较大比重。这些中小型设备对作业人员依赖性高,作业人员劳动强度大,需要机械、反复拉引机具上的操纵杆,以调整机具的工作状态。传统方法是采用电控改造升级,利用无线电技术,手持2.4g遥控器能够近距离遥控操作实现作业人员“解放双手”,当前部分小型农机装备已经开始应用。这种通过电控改造近距离遥控技术,稳定性较低,成本依旧较高,作业人员需要实时跟随机具附近操作,劳动强度依然较高。
技术实现思路
1、针对上述问题,本实用新型提出一种基于nb-iot的适用于机械操纵杆的遥操作装置,不需对被控设备进行破坏性升级改造,即可对设备操纵推拉杆进行遥操作。
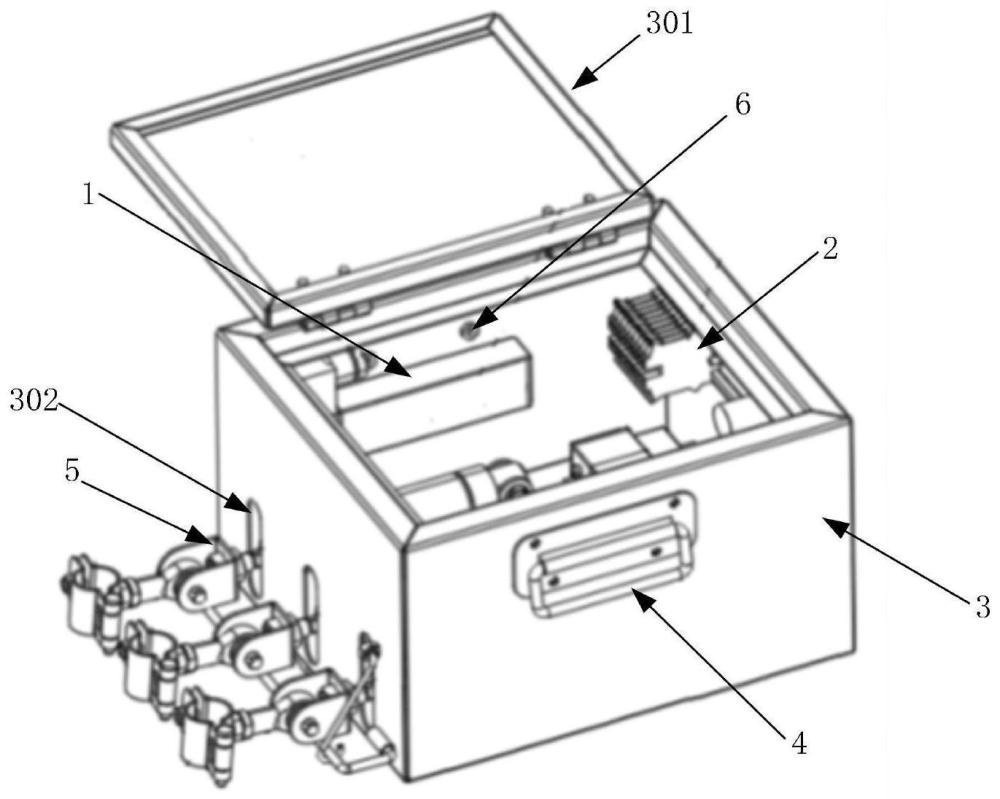
2、本实用新型基于nb-iot的适用于机械操纵杆的遥操作装置,整体安装于设备操纵杆前/后位置,包括控制单元,继电器,箱体与电动推杆单元。
3、所述控制单元为单片机,单片机与继电器安装与箱体内,两者间相连;单片机上插接有nb-iot物联网透传模块无线连接外部控制台。电动推杆单元中,电动推杆位于箱体内,与继电器相连。电动推杆末端铰接于箱体底面;电动推杆的输出杆经箱体侧壁开孔穿出,通过球铰接头连接加紧件,夹紧件与被控制操纵杆间夹紧固定。
4、由此,由远程外部控制台向向nb-iot模块发送指令,由nb-iot模块解析后传至单片机,由单片机控制继电器的通断动作,从而触发电动推杆伸长或回缩动作被控设备机械操纵杆的推拉动作。
5、本实用新型的优点在于:
6、1、本实用新型基于nb-iot的适用于机械操纵杆的遥操作装置,根据所控制设备操纵杆数量设计对应数量的电动推杆与之连接,通过远程控制电动推杆的运动,即可实现设备的运行;整体结构简单,实现成本低。
7、2、本实用新型基于nb-iot的适用于机械操纵杆的遥操作装置,充分借助被控制设备原有机械推拉杆,不需要对现有设备进行破坏性改造升级电控系统,能够最大限度减少对原有设备的改造破坏,安装拆卸方便。
8、3、本实用新型基于nb-iot的适用于机械操纵杆的遥操作装置置,能够低成本地广泛应用于带操纵杆控制的农机具设备或者工程机械设备。
技术特征:1.一种基于nb-iot的适用于机械操纵杆的遥操作装置,其特征在于:整体安装于设备操纵杆前/后位置,包括控制单元,继电器,箱体与电动推杆单元;
2.如权利要求1所述一种基于nb-iot的适用于机械操纵杆的遥操作装置,其特征在于:电动推杆的输出杆固定连接u型接头;球铰接头的球铰部分位于u型接头内,由球头上的转轴与u型接头侧壁固连;球铰接头前部连接夹紧件。
3.如权利要求1所述一种基于nb-iot的适用于机械操纵杆的遥操作装置,其特征在于:箱体为立方体结构,顶面设计有可开合上盖。
4.如权利要求1所述一种基于nb-iot的适用于机械操纵杆的遥操作装置,其特征在于:箱体侧壁安装有把手。
5.如权利要求1所述一种基于nb-iot的适用于机械操纵杆的遥操作装置,其特征在于:单片机电源线经箱体侧壁上的走线孔连接外部电源。
6.如权利要求1所述一种基于nb-iot的适用于机械操纵杆的遥操作装置,其特征在于:电动推杆单元的数量与需控制的操纵杆数量相同。
7.如权利要求1所述一种基于nb-iot的适用于机械操纵杆的遥操作装置,其特征在于:箱体侧壁上开设的通孔为纵向条形孔。
8.如权利要求1所述一种基于nb-iot的适用于机械操纵杆的遥操作装置,其特征在于:夹紧件为由两个半圆形部分构成的抱箍。
9.如权利要求1所述一种基于nb-iot的适用于机械操纵杆的遥操作装置,其特征在于:电动推杆内带编码器。
技术总结本技术公开一种基于NB‑IOT的适用于机械操纵杆的遥操作装置,不对原机械设备进行破坏性改造,通过设计一套控制装置安装与设备原有的机械推拉杆前后位置,通过控制装置中设计的多个由电动推杆驱动运动的连接杆,分别与设备原有的各个机械推拉杆分别连接,通过远程控制触发电动推杆、连接杆以及设备原有推拉杆等关联动作,实现各设备原有机械推拉杆的远程控制。本发明控制装置能够最大限度减少对原有设备的改造破坏,安装拆卸方便;且整体结构简单,实现成本低;相对传统的电控改造方案,借助设备原有机械推拉杆进行杆推拉动作,使设备运行具有稳定可靠特点。技术研发人员:陈科,李军辉,陈向东,谭荣英受保护的技术使用者:北京农业职业学院(中国共产党北京市委员会农村工作委员会党校)技术研发日:20231211技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240730/198751.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表