多机器人系统避障与最优协调系统的制作方法
- 国知局
- 2024-07-31 23:50:03
本发明涉及机器人算法,具体是多机器人系统避障与最优协调系统。
背景技术:
1、多机器人系统的核心要素是单机器人个体,但已不是单机器人物理意义上的简单叠加,其功能和作业效果也不是单机器人功能和作业效果的线性求和。一方面,机器人与机器人之间的合作与协调使多机器人系统性能呈非线性大幅提升。另一方面也使系统复杂性显著提高。多机器人系统研究涉及的问题涵盖任务规划与任务分配,路径/轨迹规划,碰撞检测,避障策略,协调策略等方方面面,甚至还包括机器人工作空间布局优化、机器人选型等。但贯穿其始终的一个问题是冲突避免与冲突解决。对于共享工作空间的多机器人系统,一方面可通过人工势场、概率地图等路径搜索方法寻求多机器人的无碰撞路径。另一方面可采用集中式或解耦式的协调控制方式规避多机器人系统可能存在的碰撞。
2、在申请号为202110068120.5的专利中,本发明公开了一种多机器人多目标实时动态避障方法、系统及存储介质,方法包括以下步骤:步骤1:建立移动机器人运动学模型;步骤2:进行目标终点的最优分配;步骤3:规划每个移动机器人的最优路径;步骤4:根据最优路径给出的移动机器人速度、角速度控制量,控制机器人行走。本发明的方法及系统同时计算每个机器人到障碍物的距离和各个机器人的距离,实现多机器人多目标实时动态避障。
3、现有的多机器人系统存在多机器人在同一个系统中工作时会出现任务冲突、路径冲突、空间冲突和碰撞冲突的问题。
4、因此,针对上述问题提出多机器人系统避障与最优协调系统。
技术实现思路
1、为了弥补现有技术的不足,解决多机器人系统中的任务冲突、路径冲突、空间冲突和碰撞冲突,保证多机器人全局时空最优协调,提出了一种多机器人系统避障与最优协调算法。
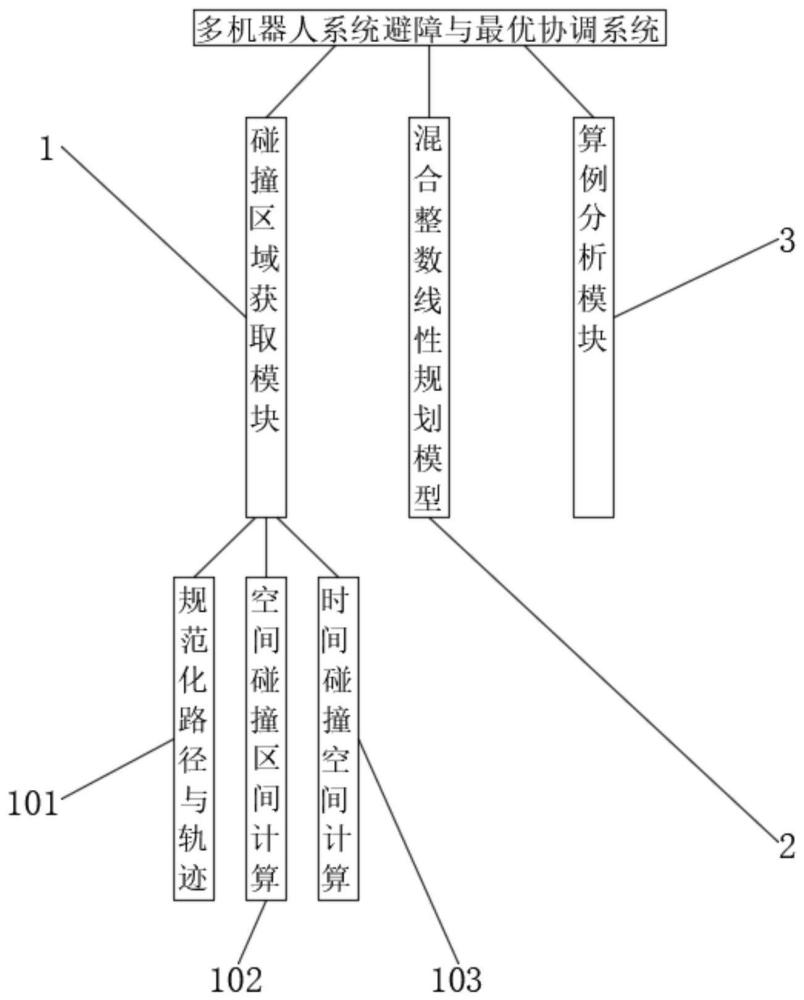
2、本发明解决其技术问题所采用的技术方案是:本发明所述的多机器人系统避障与最优协调系统,包括碰撞区域获取模块、混合整数线性规划模型、算例分析模块,所述碰撞区域获取模块,用于通过计算对机器人的碰撞区域进行获取,所述混合整数线性规划模型,是指多机器人协调的混合整数进行线性规划,所述算例分析模块,用于对多机器人系统避障与最优协调系统中的算法进行计算验证。
3、优选的,所述碰撞区域获取模块先于混合整数线性规划模型,且混合整数线性规划模型先于算例分析模块。
4、优选的,所述碰撞区域获取模块包括规范化路径与轨迹、空间碰撞区间计算、时间碰撞区间计算。
5、优选的,所述规范化路径与轨迹用于利用坐标系给定机器人的规范化路径与规范化轨迹。
6、优选的,所述混合整数线性规划模型包括多机器人避障的充分条件、多机器人最优协调的必要条件、算法有效性条件。
7、优选的,所述多机器人避障的充分条件包括两个单连杆机器人的情形与多工业机器人的情形。
8、优选的,所述多机器人最优协调的必要条件包括两个单连杆机器人的情形与多工业机器人的情形。
9、优选的,所述算法有效性条件包括赋给机器人的轨迹不能与已知环境有碰撞、机器人在首末位置不可有碰撞、对于存在碰撞的连杆组,两连杆在其路径上至少存在一点位于其空间碰撞区域外。
10、优选的,所述算例分析模块为验证算法所使用的计算机设置为windows xp,intelcore i3-2100@3.1g hz,2g内存的计算机,编程环境设置为vs2008,编程语言为c++,opengl用于结果可视化,混合整数线性规划模型求解器采用cplex_studio_preview1251试用版。
11、优选的,所述算例分析模块采用仿真环境下两台相对配置的安川motoman up6机器人为研究对象,两机器人底座相距1800mm,机器人末端具有直线、圆弧和关节空间轨迹三种轨迹类型,其中直线轨迹和圆弧轨迹均默认采用梯形速度曲线。
12、本发明的有益之处在于:
13、1、解决了多机器人系统中的任务冲突、路径冲突、空间冲突和碰撞冲突,保证多机器人全局时空最优协调,提出了一种多机器人系统避障与最优协调算法,该算法首先通过定义规范化路径和规范化轨迹,将机器人连杆与连杆之间的空间碰撞信息反映射为时间碰撞信息,然后采用延时启动的时空置换策略,推导出多工业机器人系统无碰撞的充分条件和最优协调的必要条件并建立两种条件下的混合整数线性规划模型,最后通过双工业机器人系统下的一组仿真实验验证提出算法正确性,仿真结果表明,未经优化时机器人之间存在碰撞,经充分条件优化后成功实现避障,经必要条件优化后成功实现最优协调。
技术特征:1.多机器人系统避障与最优协调系统,其特征在于:包括碰撞区域获取模块(1)、混合整数线性规划模型(2)、算例分析模块(3);
2.根据权利要求1所述的多机器人系统避障与最优协调系统,其特征在于:所述碰撞区域获取模块(1)先于混合整数线性规划模型(2),且混合整数线性规划模型(2)先于算例分析模块(3)。
3.根据权利要求1所述的多机器人系统避障与最优协调系统,其特征在于:所述碰撞区域获取模块(1)包括规范化路径与轨迹(101)、空间碰撞区间计算(102)、时间碰撞区间计算(103)。
4.根据权利要求3所述的多机器人系统避障与最优协调系统,其特征在于:所述规范化路径与轨迹(101)用于利用坐标系给定机器人的规范化路径与规范化轨迹。
5.根据权利要求1所述的多机器人系统避障与最优协调系统,其特征在于:所述混合整数线性规划模型(2)包括多机器人避障的充分条件(201)、多机器人最优协调的必要条件(202)、算法有效性条件(203)。
6.根据权利要求5所述的多机器人系统避障与最优协调系统,其特征在于:所述多机器人避障的充分条件(201)包括两个单连杆机器人的情形与多工业机器人的情形。
7.根据权利要求5所述的多机器人系统避障与最优协调系统,其特征在于:所述多机器人最优协调的必要条件(202)包括两个单连杆机器人的情形与多工业机器人的情形。
8.根据权利要求5所述的多机器人系统避障与最优协调系统,其特征在于:所述算法有效性条件(203)包括赋给机器人的轨迹不能与已知环境有碰撞、机器人在首末位置不可有碰撞、对于存在碰撞的连杆组,两连杆在其路径上至少存在一点位于其空间碰撞区域外。
9.根据权利要求1所述的多机器人系统避障与最优协调系统,其特征在于:所述算例分析模块(3)为验证算法所使用的计算机设置为windows xp,intelcore i3-2100@3.1g hz,2g内存的计算机,编程环境设置为vs2008,编程语言为c++,opengl用于结果可视化,混合整数线性规划模型求解器采用cplex_studio_preview1251试用版。
10.根据权利要求1所述的多机器人系统避障与最优协调系统,其特征在于:所述算例分析模块(3)采用仿真环境下两台相对配置的安川motoman up6机器人为研究对象,两机器人底座相距1800mm,机器人末端具有直线、圆弧和关节空间轨迹三种轨迹类型,其中直线轨迹和圆弧轨迹均默认采用梯形速度曲线。
技术总结本发明属于机器人算法技术领域,具体地说是多机器人系统避障与最优协调系统,包括碰撞区域获取模块、混合整数线性规划模型、算例分析模块,该算法系统首先通过定义规范化路径和规范化轨迹,将机器人连杆与连杆之间的空间碰撞信息反映射为时间碰撞信息,然后采用延时启动的时空置换策略,推导出多工业机器人系统无碰撞的充分条件和最优协调的必要条件并建立两种条件下的混合整数线性规划模型,最后通过双工业机器人系统下的一组仿真实验验证提出算法正确性,仿真结果表明,未经优化时机器人之间存在碰撞,经充分条件优化后成功实现避障,经必要条件优化后成功实现最优协调。技术研发人员:田军,廖泽立,尹华壬受保护的技术使用者:慧灵科技(深圳)有限公司技术研发日:技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240730/198743.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。