一种网络通讯下耦合多机动目标的抗攻击定位方法
- 国知局
- 2024-07-31 22:46:14
本发明属于状态估计,涉及一种抗攻击定位方法,具体涉及一种自适应事件触发机制和网络攻击影响下多机动目标系统的抗攻击定位方法。
背景技术:
1、机动目标定位技术在导航、航空交通以及军事等相关领域被广泛应用,然而在实际工程应用中,单一的机动目标往往难以满足实际需求,因此多机动目标的定位问题在近年来得到了广泛的研究。如何在实际工程中较好地定位目标,一直是机动目标定位技术研究领域中备受重视和关注的科学技术问题之一,其具有广泛的科学技术应用和研究前景,处理好该问题有利于现代科学和技术的进一步发展。
2、考虑到通信网络具有有限的带宽和资源,数据在传输过程中难免会相互冲突、拥堵或丢失,因此引入自适应事件触发机制来降低网络资源的使用率,以此尽可能地避免数据间的冲突。此外,由于网络化环境的开放性和共享性,数据在通信信道中传输时可能会遭受网络攻击的影响,而受攻击影响的数据传输到估计器会影响估计性能。因此,在自适应事件触发机制下设计抗攻击估计方法具有重要的实际意义。
3、目前已有的估计方法不能同时处理自适应事件触发机制和数据完整性攻击下的多机动目标系统的状态估计问题,若采用传统的状态估计方法对多机动目标的状态进行估计将会影响估计效果。因此,设计同时适用于这些网络化诱导现象的状态估计方法具有实际意义。
技术实现思路
1、为了解决现有估计方法不能综合考虑自适应事件触发机制和数据完整性攻击下的多机动目标系统的状态估计问题,本发明提供了一种网络通讯下耦合多机动目标的抗攻击定位方法。
2、本发明的目的是通过以下技术方案实现的:
3、一种网络通讯下耦合多机动目标的抗攻击定位方法,包括如下步骤:
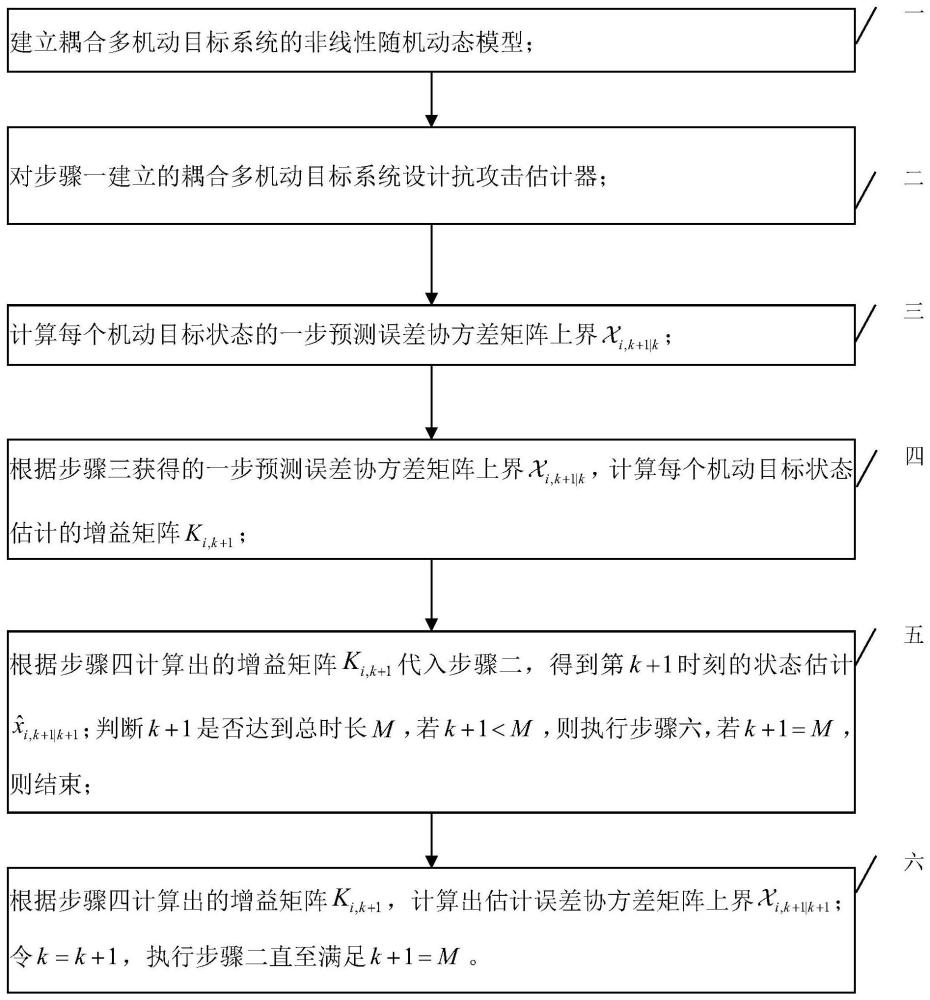
4、步骤一、建立耦合多机动目标系统的非线性随机动态模型,具体步骤如下:
5、步骤一一、建立耦合多机动目标系统的非线性随机动态模型为:
6、
7、
8、式中,xi,k=[pi,k qi,k λi,k]t,上标“t”表示对矩阵取转置,i为机动目标标号,i=1,2,…,n,n表示机动目标的数量,(pi,k,qi,k)表示第i个机动目标在k时刻笛卡尔坐标系下的位置信息,λi,k表示第i个机动目标在k时刻笛卡尔坐标系下的方向信息;xi,k+1=[pi,k+1qi,k+1 λi,k+1]t,(pi,k+1,qi,k+1)表示第i个机动目标在k+1时刻笛卡尔坐标系下的位置信息,λi,k+1表示第i个机动目标在k+1时刻笛卡尔坐标系下的方向信息;δi,k和分别表示第i个机动目标在k时刻的位移速度和角速度;sin(·)和cos(·)分别为正弦函数和余弦函数;“∑”为求和符号;ωij,k为第i个机动目标和第j个机动目标在k时刻的耦合权重,表示每个机动目标的移动会受到其他机动目标的影响;γ为多机动目标系统中的内耦合矩阵,表示每个机动目标的位置信息和方向信息之间的相互影响;xj,k=[pj,k qj,k λj,k]t,(pj,k,qj,k)表示第j个机动目标在k时刻笛卡尔坐标系下的位置信息,λj,k表示第j个机动目标在k时刻笛卡尔坐标系下的方向信息;bi,k为k时刻系统中的噪声密度矩阵;为多机动目标系统中具有零均值且协方差矩阵为qi,k的过程噪声;yi,k为多机动目标系统中第i个机动目标在k时刻的测量输出;νi,k为多机动目标系统中具有零均值且协方差矩阵为ri,k的测量噪声;
9、步骤一二、为了避免数据在通信信道中传输时拥堵,引入自适应事件触发机制来调度数据传输的序列,具体过程为:
10、步骤一二一、针对第i个机动目标,选取如下事件触发函数:
11、
12、式中,为第i个机动目标在上一触发时刻的测量输出;定义第i个机动目标的事件触发时刻序列为为当前k时刻对应的上一个触发时刻;为μi,k的转置矩阵;为yi,k的转置矩阵;φi,k为k时刻的已知对称正定矩阵;σi,k为k时刻的动态参数;
13、步骤一二二、当时,测量数据将会传输给估计器,则第i个机动目标的下一事件触发时刻由下式决定:
14、
15、式中,为正整数集;inf{·}为取下限函数;
16、步骤一二三、经过自适应事件触发机制,传输给估计器的真实测量值为:
17、
18、式中,为第i个机动目标在k+1时刻经过自适应事件触发机制后传递给估计器的实际测量输出;
19、步骤一三、当数据在一个共享的网络环境中传输时,考虑如下攻击策略:攻击者首先决定是否发起乘性攻击,若不发起乘性攻击再决定是否发起线性攻击,则抗攻击估计器实际接收到的测量数据为:
20、
21、式中,ηi,k+1∈{0,1}和θi,k+1∈{0,1}分别为判断攻击者在k+1时刻是否发起乘性攻击和线性攻击的二元决策变量;根据攻击策略可知,当ηi,k+1=1时,测量数据在k+1时刻遭受乘性攻击;当θi,k+1=1时,测量数据在k+1时刻遭受线性攻击;当ηi,k+1=0且θi,k+1=0时,测量数据在k+1时刻成功地传输到估计器;相应地,记和prob{·}为事件“·”发生的概率,即为第i个机动目标在k+1时刻受到乘性攻击的概率,为第i个机动目标在k+1时刻受到线性攻击的概率;由攻击策略可知αi,k+1和βi,k+1分别为攻击者在k+1时刻对第i个机动目标发起乘性攻击和线性攻击的概率,αi,k+1∈(0,1)和βi,k+1∈(0,1)为已知的常数,并且prob{ηi,k+1θi,k+1=1}=0,即乘性攻击和线性攻击不会被同时发起;ti,k+1为攻击者在k+1时刻对第i个机动目标发起的攻击矩阵,且||ti,k+1||≤b,b为攻击矩阵ti,k+1的范数的上界,b为已知的正标量,||·||为矩阵“·”的谱范数;ρi,k+1为一个零均值且协方差矩阵为si,k+1>0的高斯噪声;为第i个机动目标在k+1时刻经过自适应事件触发机制并遭受网络攻击后的实际测量输出;
22、步骤二、对步骤一建立的耦合多机动目标系统设计抗攻击估计器,具体步骤如下:
23、步骤二一、引入以下符号:
24、
25、式中,f(xi,k)为多机动目标系统中的非线性函数;ci,k为第i个机动目标在k时刻的测量矩阵;
26、步骤二二、针对网络中的第i个机动目标,基于可获得的实际测量输出,构造状态估计器:
27、
28、
29、式中,为k时刻对第i个机动目标状态的一步预测;为k时刻第i个机动目标基于多机动目标系统的非线性函数的估计形式;为k时刻对第i个机动目标的状态估计;为k时刻对第j个机动目标的状态估计;为k+1时刻对第i个机动目标的状态估计;ki,k+1为k+1时刻第i个机动目标状态估计的增益矩阵;ci,k+1为第i个机动目标在k+1时刻的测量矩阵;
30、步骤三、计算网络中每个机动目标状态的一步预测误差协方差矩阵上界
31、
32、式中,ι1为已知的缩放参数;为ι1的倒数;ai,k为k时刻第i个机动目标的状态所对应的非线性函数f(xi,k)在估计处的雅可比矩阵;mi,k和ni,k为非线性函数f(xi,k)基于泰勒展开公式得到的已知误差矩阵;为k时刻第i个机动目标状态的一步预测误差协方差矩阵的上界;为k时刻第i个机动目标状态的估计误差协方差矩阵的上界;l为一个已知的正标量,并满足l-1为l的倒数;为k时刻第j个机动目标状态的估计误差协方差矩阵的上界;中间变量为k时刻第i个机动目标的耦合权重之和;是ai.k的转置矩阵;是mi.k的转置矩阵;是ni.k的转置矩阵;γt是γ的转置矩阵;是bi.k的转置矩阵;是的逆矩阵;是的逆矩阵;
33、步骤四、根据步骤三获得的一步预测误差协方差矩阵上界计算网络中每个机动目标状态估计的增益矩阵ki,k+1:
34、
35、其中:
36、
37、
38、
39、
40、
41、式中,ι2、ι3、ι4、ι5、ι6、ι7、ι8和ι9为已知的缩放参数,和分别为ι2、ι3、ι4、ι5、ι6、ι7、ι8和ι9的倒数;b2为b的平方;为的平方;φi,k+1为自适应事件触发机制中k+1时刻的已知对称正定矩阵;ri,k+1为多机动目标系统中k+1时刻的过程噪声的协方差矩阵;si,k+1为k+1时刻攻击过程中产生的高斯噪声的协方差矩阵;是的转置矩阵;是ci.k+1的转置矩阵;是的逆矩阵;tr{·}表示对“·”求迹;i2为二维单位矩阵;
42、步骤五、将步骤四计算出的每个机动目标状态估计的增益矩阵ki,k+1代入步骤二,获得k+1时刻第i个机动目标的状态估计判断k+1是否达到总时长m,若k+1<m,则执行步骤六,若k+1=m,则结束;
43、步骤六、根据步骤四计算出的每个机动目标状态估计的增益矩阵ki,k+1,计算出每个机动目标状态的估计误差协方差矩阵上界
44、
45、式中,为k+1时刻第i个机动目标状态的估计误差协方差矩阵的上界;是的转置矩阵;是ki.k+1的转置矩阵;i3为三维单位矩阵;
46、令k=k+1,执行步骤二,直至满足k+1=m。
47、相比于现有技术,本发明具有如下优点:
48、1、本发明同时考虑了自适应事件触发机制和具有两种攻击形式的数据完整性攻击对机动目标状态的估计性能的影响,在最小方差意义下,采用递推方法对多机动目标系统的状态进行估计。该方法具有易于求解与实现的优点。
49、2、本发明采用非增广方式,可以大幅度降低运算负担,并提高计算效率,利用随机分析技术,基于黎卡提差分方程得到一个局部最优估计误差协方差矩阵上界,并通过设计恰当的估计增益矩阵,使得估计误差协方差矩阵上界的迹达到最小值。上述方法实现了在自适应事件触发机制和网络攻击下所设计的估计方法仍具有较好性能。
50、3、本发明解决了现有状态估计方法不能同时处理自适应事件触发机制和数据完整性攻击下的多机动目标系统的状态估计问题,从而提高了此类问题估计性能的准确率。从仿真图可以看出,随着乘性攻击概率αi,k的增加,均方误差也随之增加,当乘性攻击概率由0.15变为0.45时,平均均方误差增加约21%;当乘性攻击概率由0.45变为0.75时,平均均方误差增加约6%。随着线性攻击概率βi,k的增加,均方误差也随之增加,当线性攻击概率由0.25变为0.55时,平均均方误差增加约12%;当线性攻击概率由0.55变为0.85时,平均均方误差增加约3%。这也进一步验证了本发明所提出的状态估计方法的可行性和有效性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/194507.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表