-

基于多智能体强化学习的异构多机系统动态任务调度方法
本发明涉及多智能体任务调度,特别涉及一种基于多智能体强化学习的异构多机系统动态任务调度方法。背景技术:1、近年来,随着机器人技术迅速发展,社会各行业对机器人技术的应用愈发深入,在工业领域中,协作机器人......
-
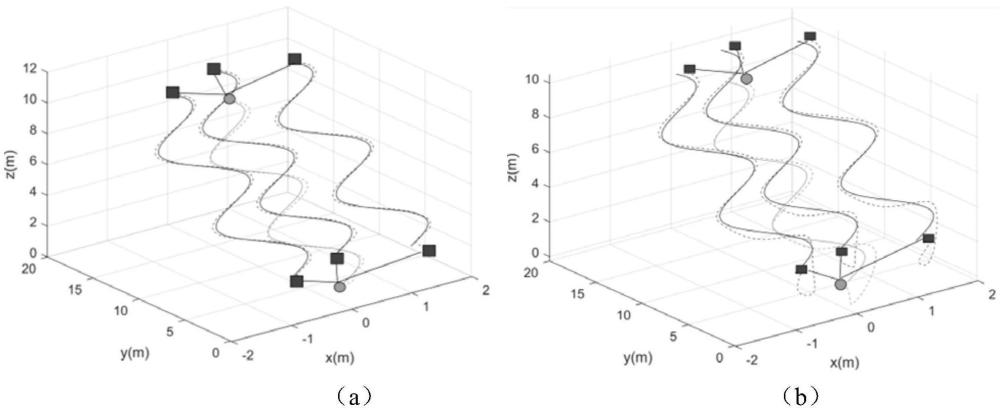
时变状态约束下多机协同载物的预设时间控制器设计方法
本发明涉及无人机,尤其涉及一种时变状态约束下多机协同载物的预设时间控制器设计方法。背景技术:1、目前经典四旋翼无人机动力学模型通常采用牛顿-欧拉法或者拉格朗日法进行推导建立。然而,实际情况下无人机往往......
-
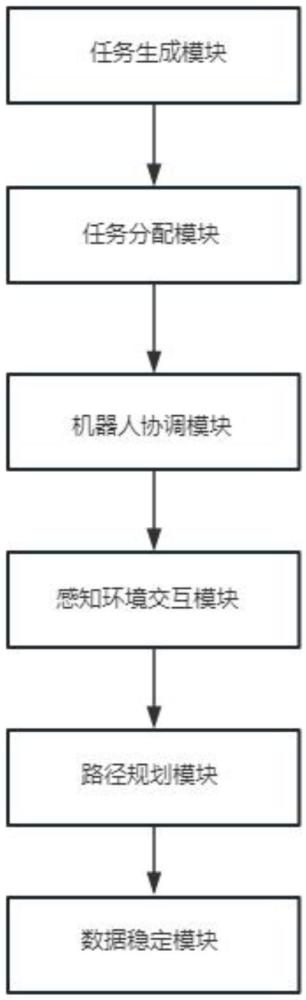
一种基于多机器人协作的任务分配系统
本发明属于机器人任务分配,具体涉及一种基于多机器人协作的任务分配系统。背景技术:1、在复杂的现实动态环境中,由于环境变化、时间约束、资源分布不均等因素,多机器人系统需要在有限时间,有限资源的情况下解决......
-
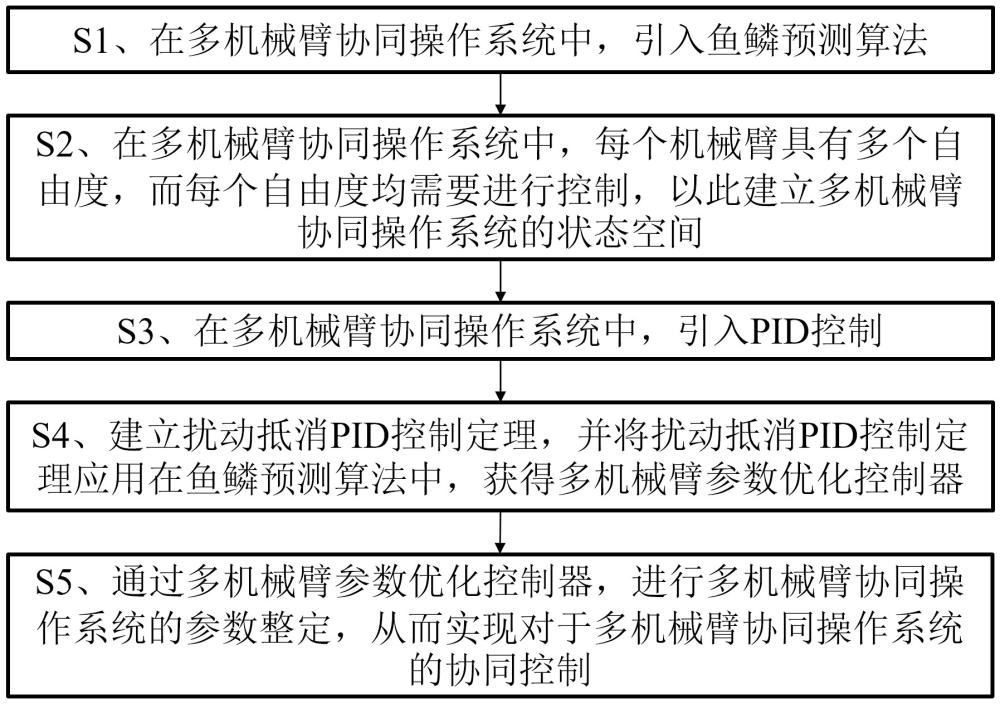
基于鱼鳞预测算法和PID的多机械臂协同控制方法
本发明属于pid控制,具体涉及基于鱼鳞预测算法和pid的多机械臂协同控制方法。背景技术:1、控制系统在工业生产中扮演着关键的角色,自动化控制技术的应用使得生产过程更加高效、精确,它可以降低人为错误的风......
-
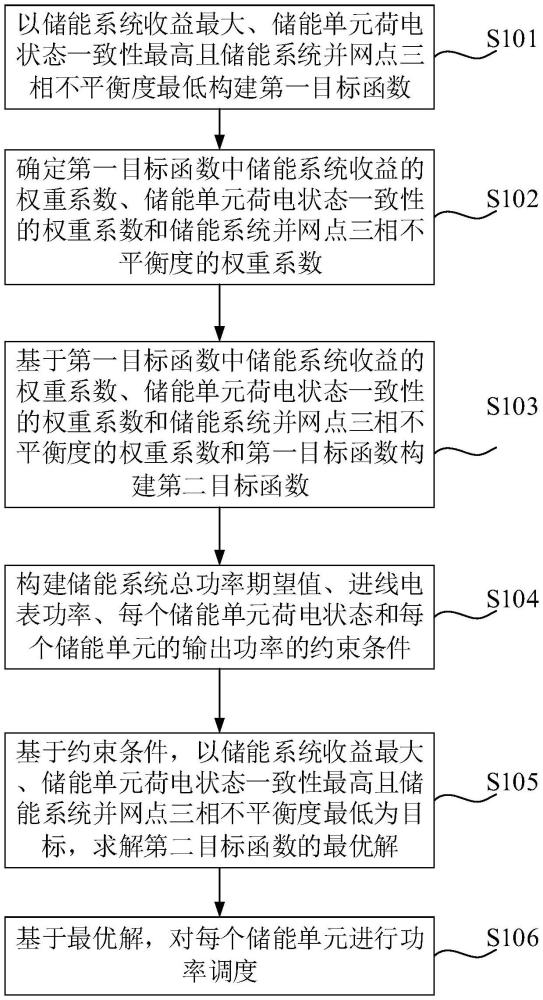
多机协同分相控制方法、装置、计算机设备及存储介质与流程
本发明涉及分布式能源控制,具体涉及多机协同分相控制方法、装置、计算机设备及存储介质。背景技术:1、随着经济社会的迅速发展,配电网负荷急剧攀升,特定地区负荷密集,导致变压器容量规划无法跟上用电需求的激增......
-

一种基于参考校正算法的多机器人分布式编队控制方法
本发明涉及多移动机器人编队控制,尤其涉及一种基于参考校正算法的多机器人分布式编队控制方法。背景技术:1、在过去40年中,机器人也得到了前所未有的发展。然而,在震后人员搜救,未知地形探索,目标围捕等领域......
-
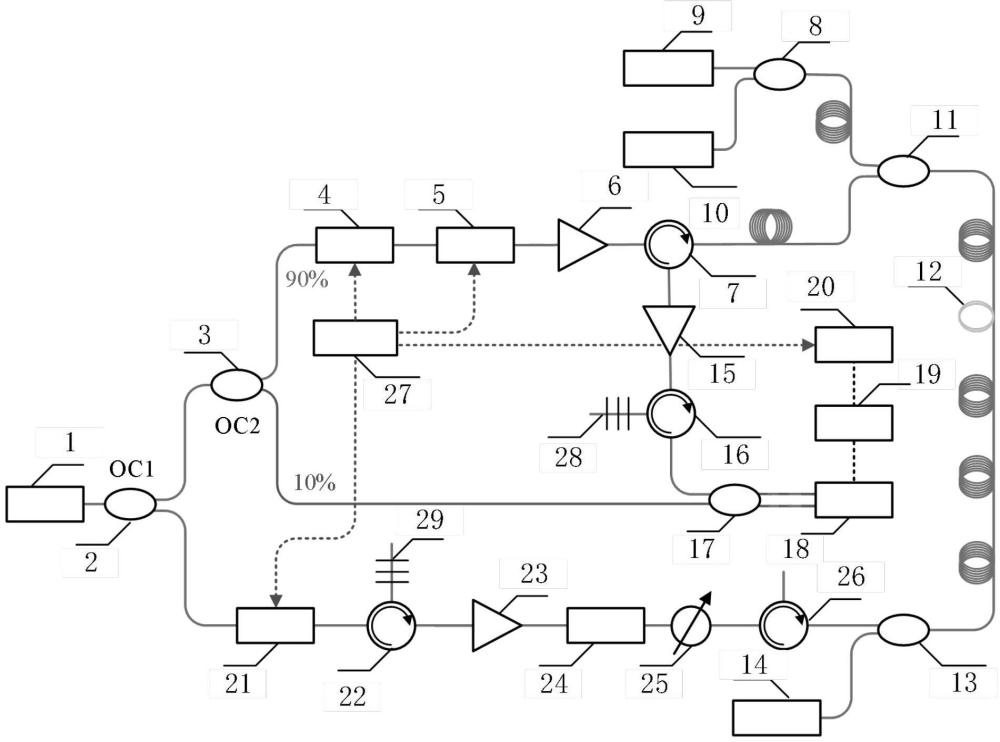
基于多机制融合放大的超长距离DVS光时域反射计及其工作方法
本发明涉及振动事件监测,具体涉及一种基于多机制融合放大的超长距离dvs光时域反射计及其工作方法。背景技术:1、相位敏感光时域反射计φ-otdr(phase-sensitive optical time......
-
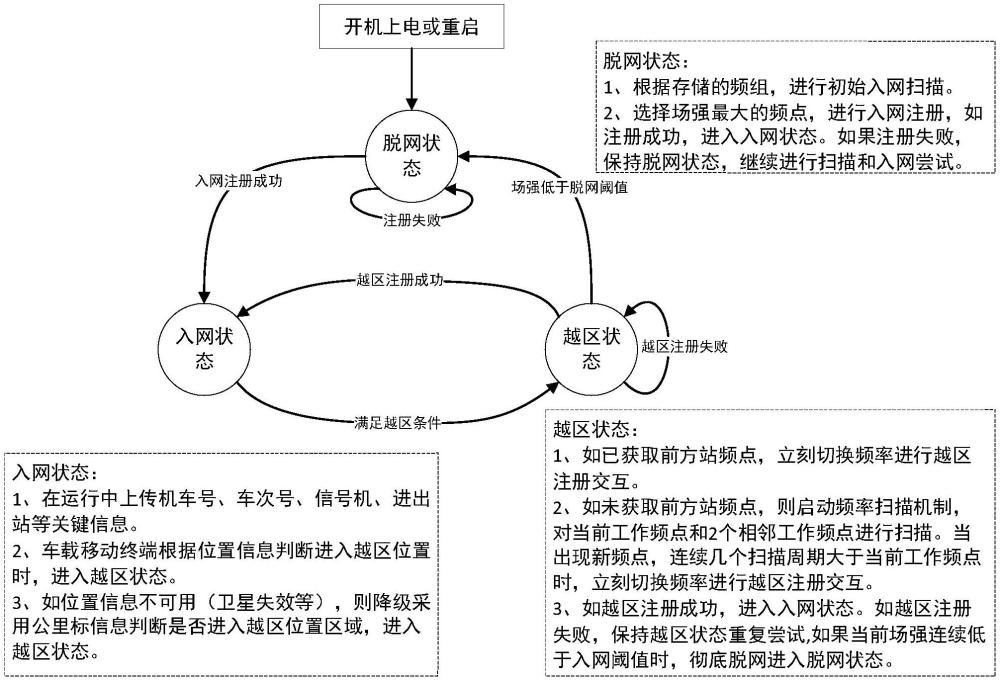
一种多机制融合的列车车载设备小区重选方法与流程
本发明涉及车载通信,尤其是涉及一种多机制融合的列车车载设备小区重选方法。背景技术:1、在窄带数字集群无线通信系统中,移动终端的位置管理是系统可用的一个重要功能。例如中国专利申请cn115913256a......
-
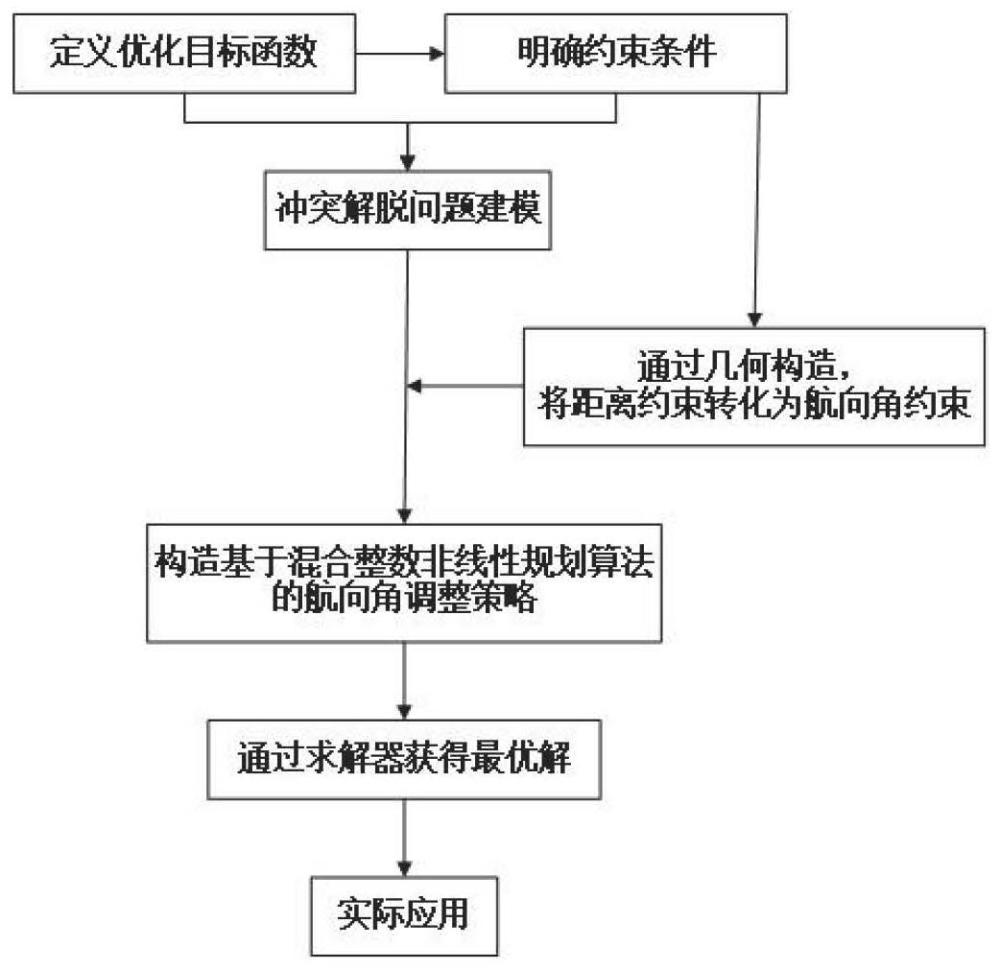
基于MINLP的多机飞行冲突解脱方法
本发明涉及的是一种飞行轨迹控制领域的技术,具体是一种基于混合整数线性规划(minlp)的多机飞行冲突解脱方法,可以用于商用飞机、通用航空等空管决策支持工具来辅助管制员进行决策。背景技术:1、针对冲突解......
-
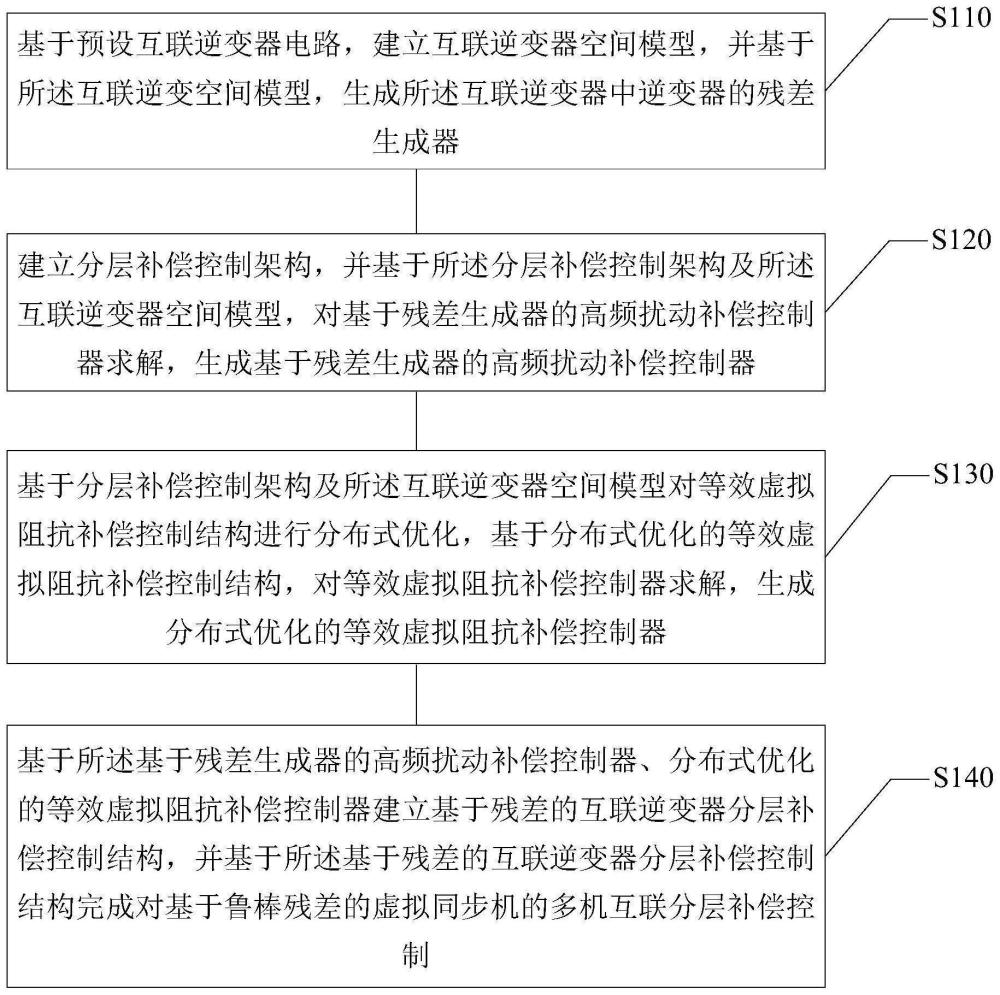
虚拟同步机多机互联分层补偿控制方法以及装置
本公开涉及虚拟同步机领域,具体而言,涉及一种虚拟同步机多机互联分层补偿控制方法。背景技术:1、近年来,全球碳排放日趋增加。为此,我国提出了“双碳”目标,大力发展分布式可再生能源。分布式可再生能源和电力......
-
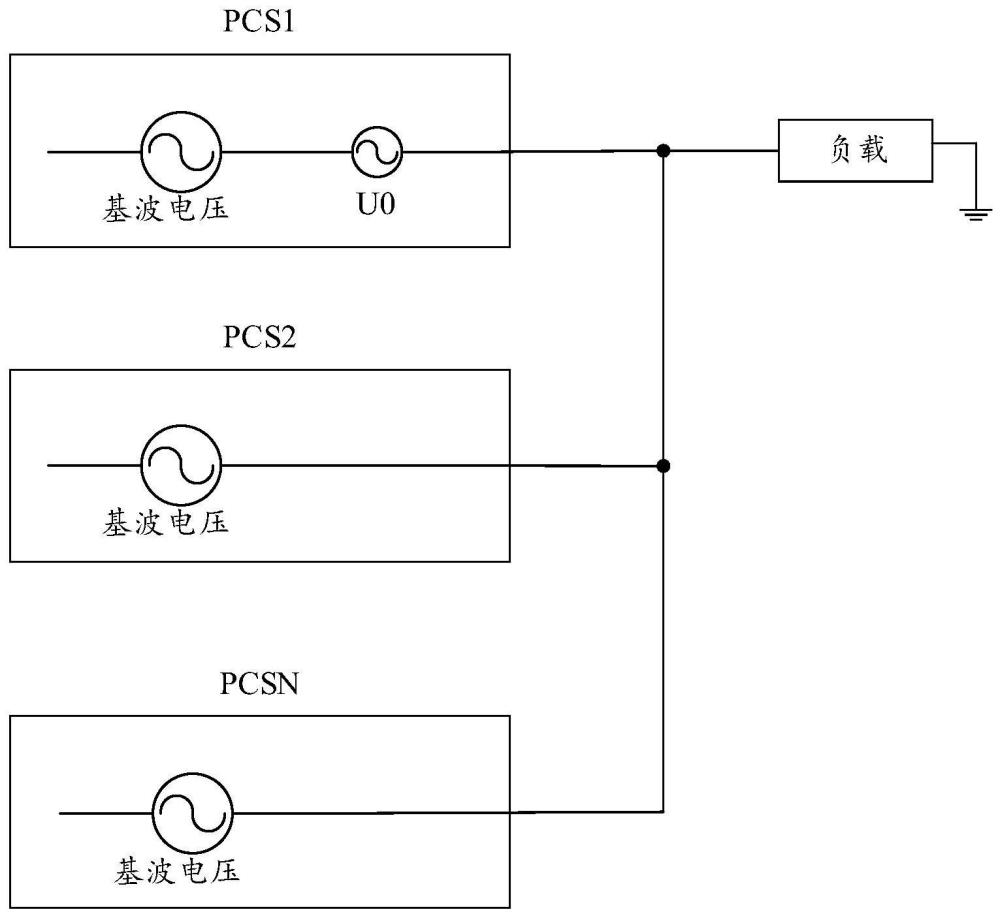
一种多机并联系统及电压调节方法与流程
本申请涉及电力电子,具体涉及一种多机并联系统及电压调节方法。背景技术:1、目前,为了提高储能系统的带载能力,储能系统包括多个变流器,多个变流器的交流侧连接在一起进行并网发电,即多机并联系统。在电网发生......
-
一种具有快卸功能的多机型通用试车系留机构的制作方法
本申请属于系留锁设计领域,特别涉及一种具有快卸功能的多机型通用试车系留机构。背景技术:1、为飞机配备的地面试加力系留装置中与飞机系留接口配合的试车系留锁的结构形式有很多种,但存在着不同机型间无法通用的......
-
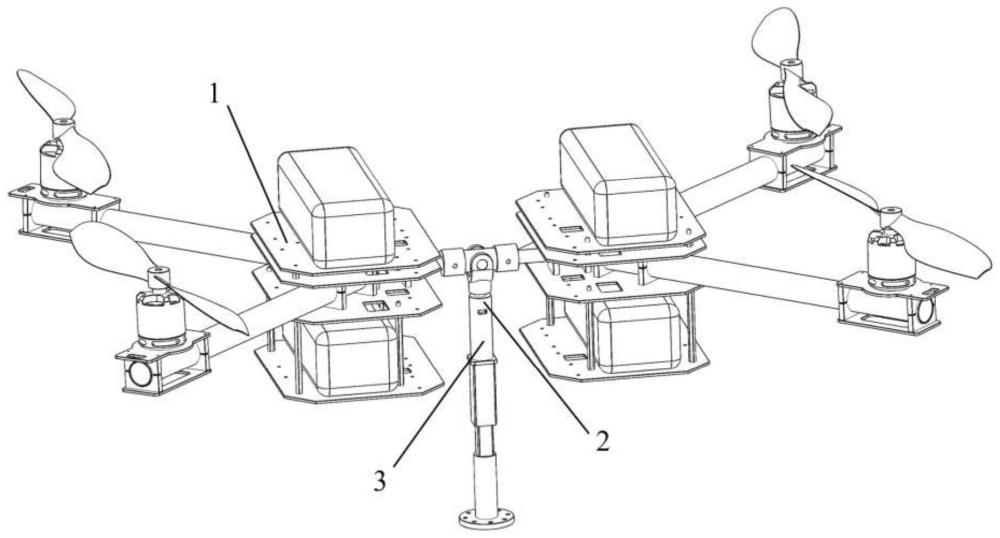
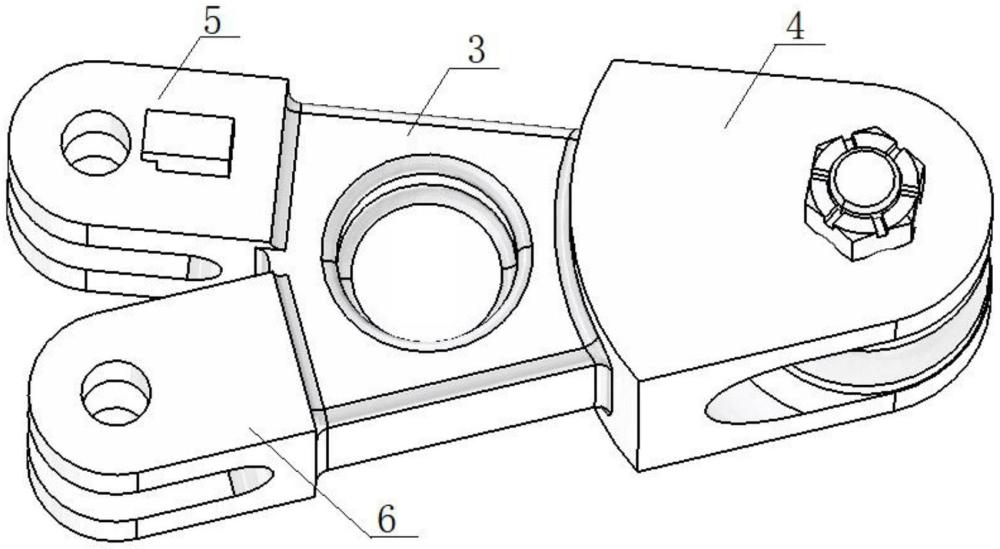
一种用于多机协同搬运作业的旋翼无人机
本发明涉及旋翼无人机,特别涉及一种用于多机协同搬运作业的旋翼无人机。背景技术:1、随着工业化和现代化的加速发展,各类设备和装备在野外环境中的使用日益增多。这些环境往往因地形复杂多变而导致地面搬运方式难......
-

多机并联的无人机系统的制作方法
本技术涉及无人机领域,尤其涉及一种多机并联的无人机系统。背景技术:1、随着无人机技术的发展及应用,其技术不断地更新迭代,应用领域也越来越广泛,不论民用还是军用均可看到无人机的身影。目前常见无人机主要分......
-
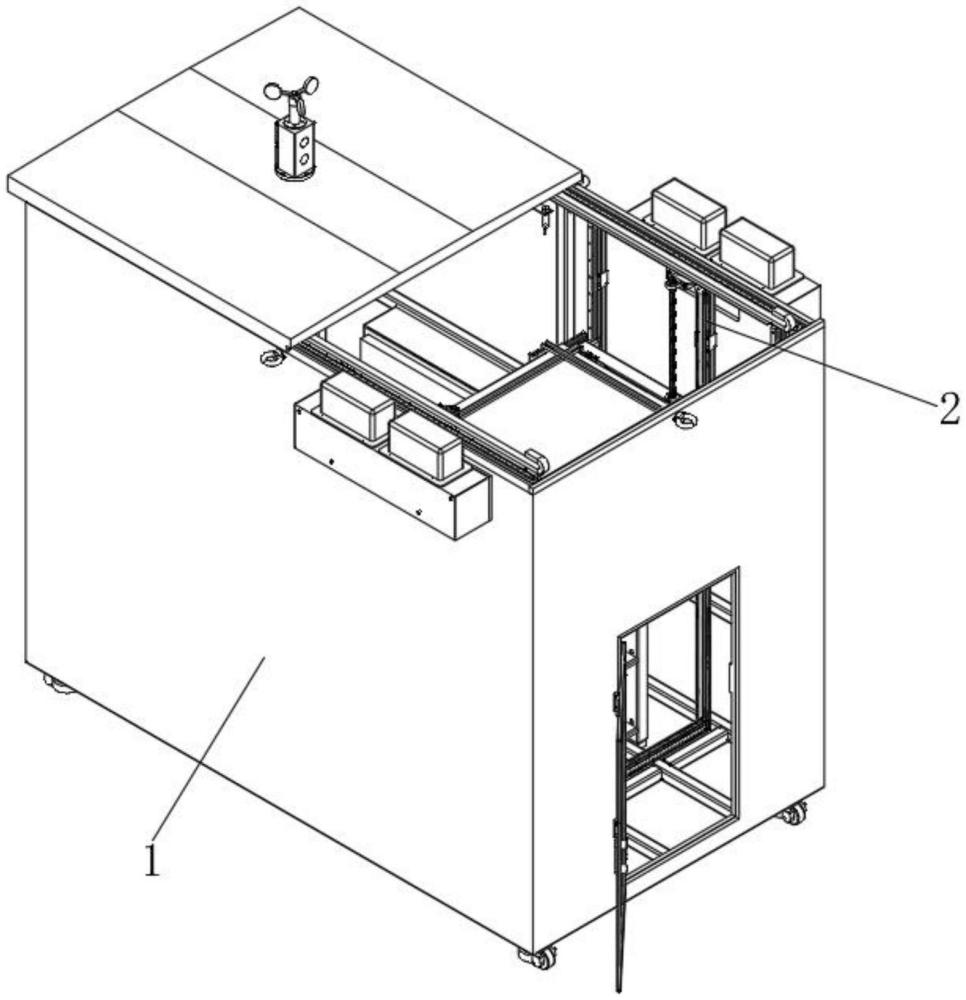
一种无人机的多机机巢的制作方法
本技术涉及无人机,尤其涉及一种无人机的多机机巢。背景技术:1、无人机应用越来越广泛,当前主要依赖飞手手动或规划航线飞行,对于需要周期性采集数据的应用场景,无人值守成为目前研究方向。多旋翼以重量划分,分......
-
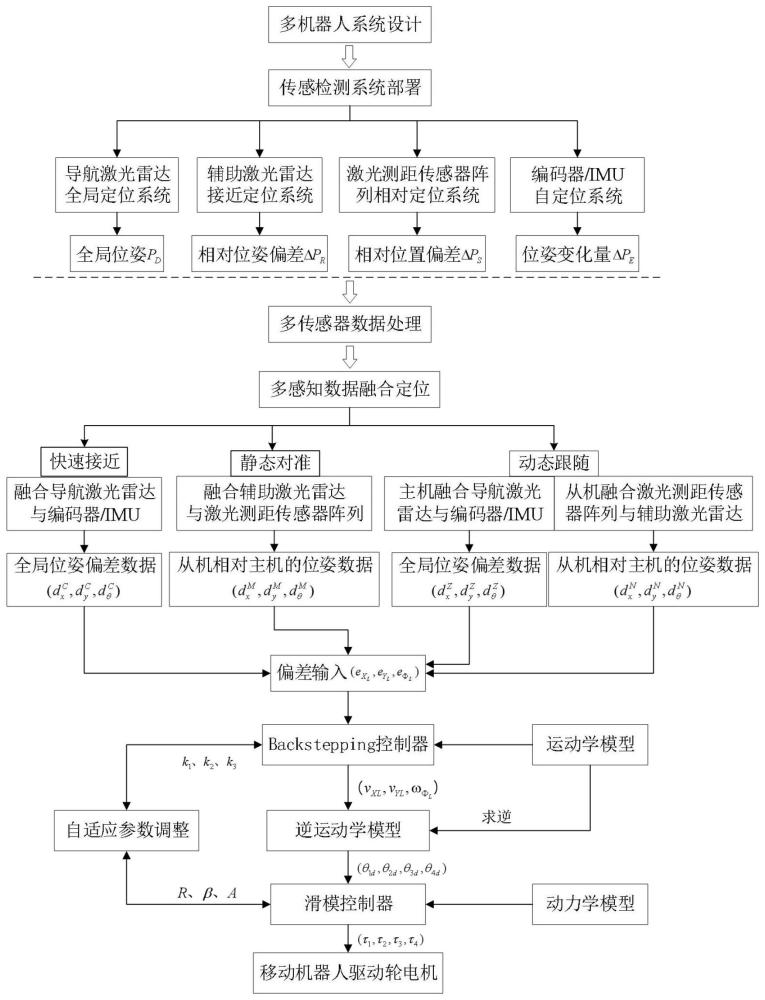
基于多感知数据融合的多机器人接近对准定位控制方法
本发明属于智能制造与机器人,具体涉及一种基于多感知数据融合的多机器人接近对准定位控制方法。背景技术:1、随着机器人智能化的发展,机器人化智能制造将成为智能制造的主攻方向。随着航空航天制造业的快速发展,......
-
多任务场景下多机器人自适应分组合作的控制方法及设备
本发明属于机器人,特别是涉及一种多任务场景下多机器人自适应分组合作的控制方法及设备。背景技术:1、多机器人任务分配(mrta)是受关注的多机器人系统问题之一,多机器人任务分配(mrta)指的是一组给定......
-

一种改进人工势场算法的多机器人编队控制方法
本发明属于多机器人编队控制领域,尤其涉及一种改进人工势场算法的多机器人编队控制方法。背景技术:1、随着现代控制技术的发展和人类科技水平的提高,机器人被寄予更大的期望。但由于真实环境的复杂性和单机器人性......
-
基于MILP算法的多机飞行冲突解脱方法
本发明涉及的是一种飞行航迹控制领域的技术,具体是一种基于混合整数线性规划(milp)算法的多机飞行冲突解脱方法,可以用于商用飞机、通用航空等空管决策支持工具来辅助管制员进行决策。背景技术:1、在当前的......
-
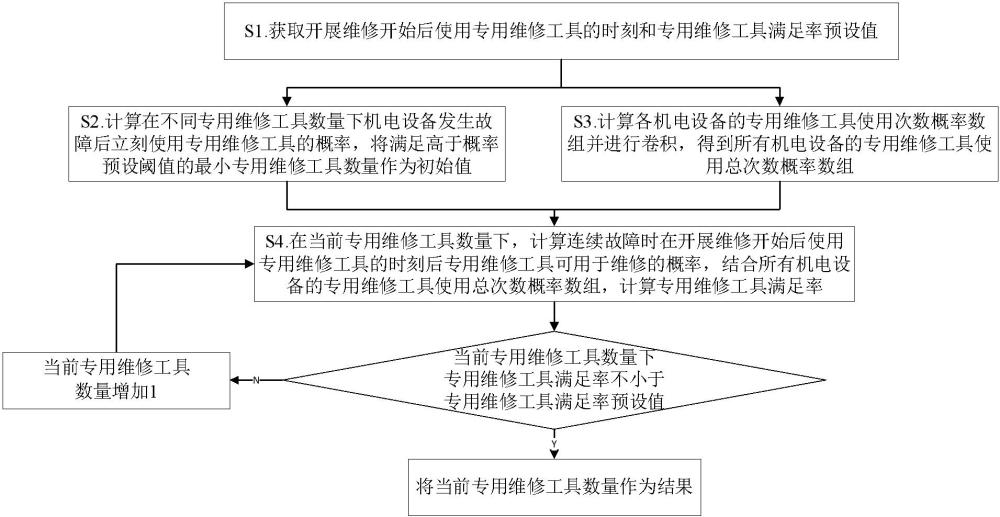
多机电设备场景下专用维修工具数量的确定方法和系统
本申请属于设备维修优化领域,更具体地,涉及多机电设备场景下专用维修工具数量的确定方法和系统。背景技术:1、专用维修工具是针对特定型号设备量身定做的维修工具。一般在修理该设备的某个阶段开始使用其专用维修......
-
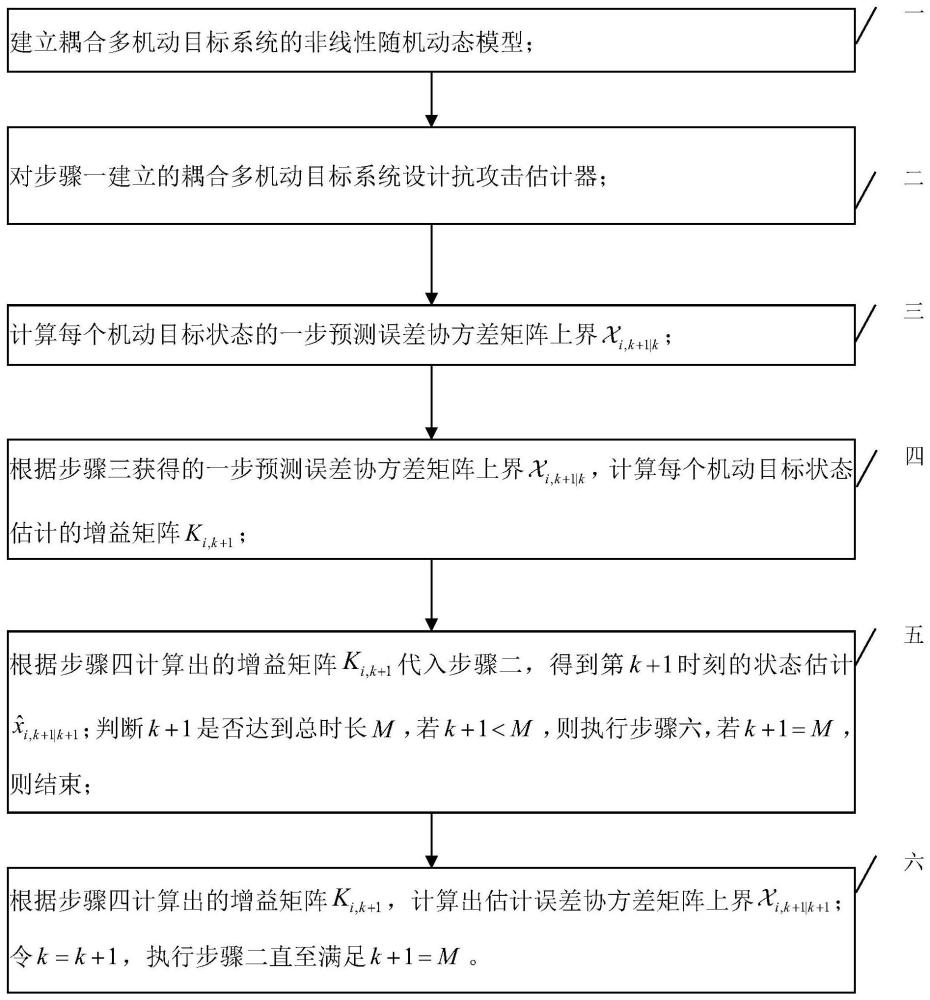
一种网络通讯下耦合多机动目标的抗攻击定位方法
本发明属于状态估计,涉及一种抗攻击定位方法,具体涉及一种自适应事件触发机制和网络攻击影响下多机动目标系统的抗攻击定位方法。背景技术:1、机动目标定位技术在导航、航空交通以及军事等相关领域被广泛应用,然......
-
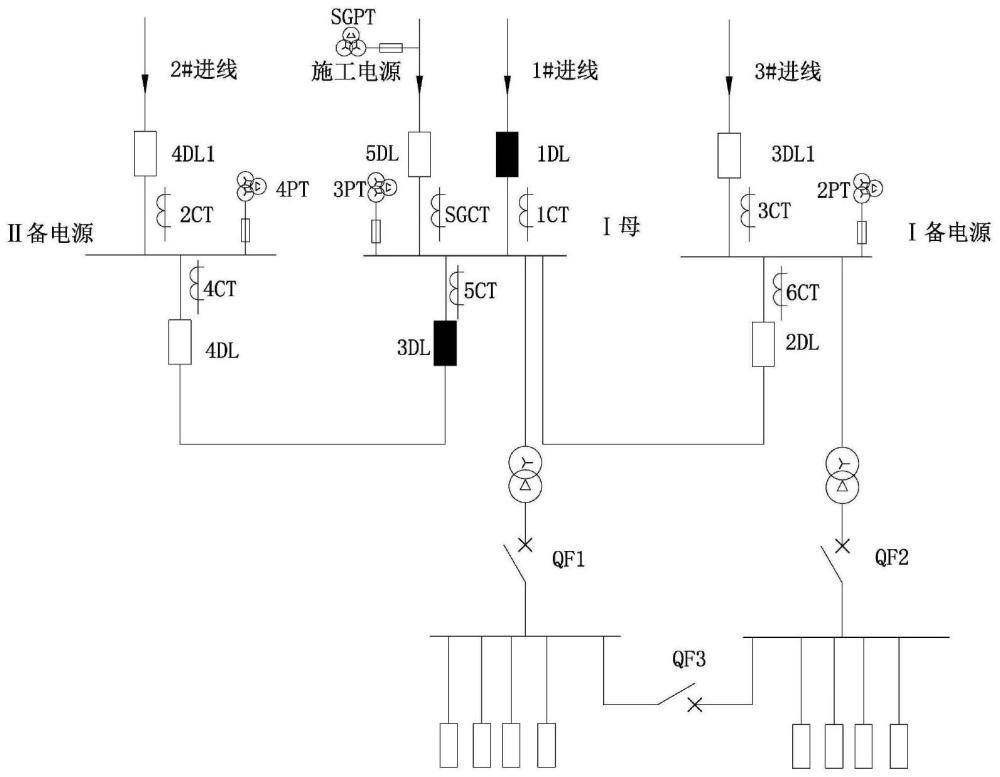
一种多机组的大型水电站厂用电系统备自投方法与流程
本发明涉及厂电备自投,特别是一种多机组的大型水电站厂用电系统备自投方法。背景技术:1、目前普通的备自投逻辑无法满足各种运行方式要求,导致母线失电后无法自动投入备用电源,同时目前所设计的备自投缺少供电电......
-
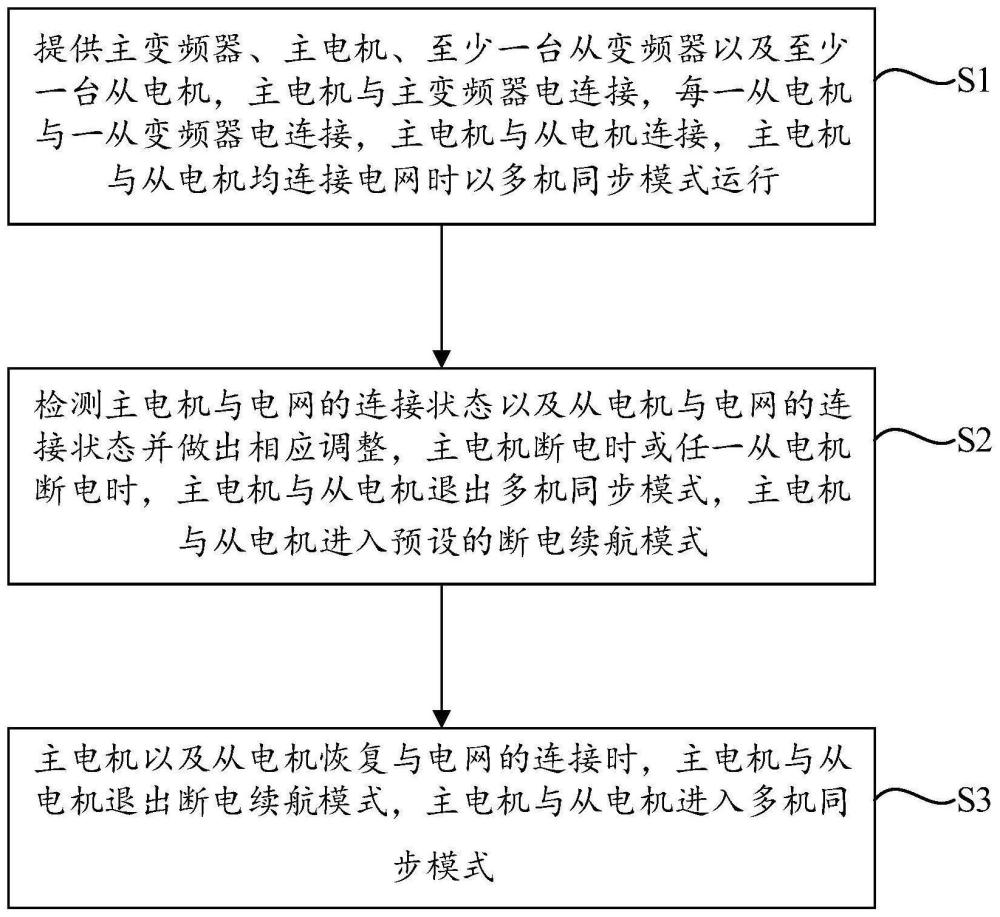
多机同步变频器断电续航方法以及系统与流程
本公开实施例涉及自动控制,特别涉及一种多机同步变频器断电续航方法以及系统。背景技术:1、目前,变频器广泛应用于电力、暖通、橡胶、水泥等行业,驱动的设备包括风机、水泵、压缩机、密炼机等。随着电力电子技术......
-
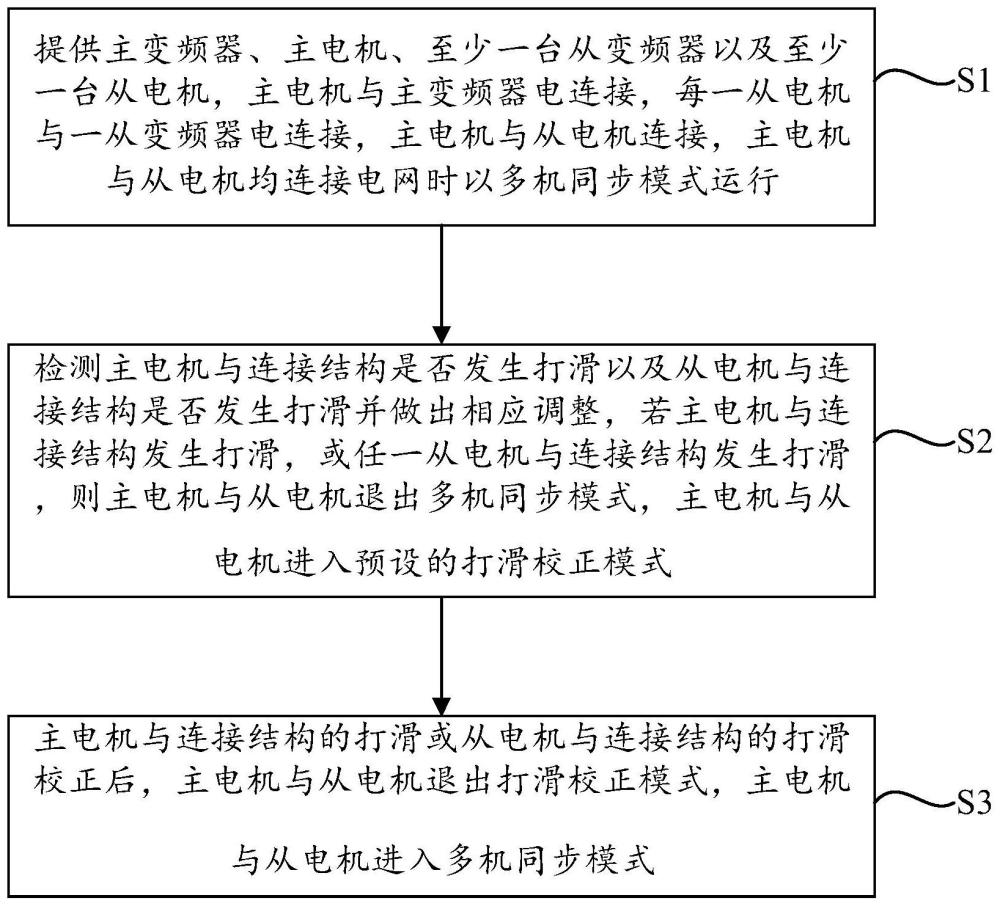
多机同步变频器打滑校正方法以及系统与流程
本公开实施例涉及自动控制,特别涉及一种多机同步变频器打滑校正方法以及系统。背景技术:1、目前,变频器广泛应用于电力、暖通、橡胶、水泥等行业,驱动的设备包括风机、水泵、压缩机、密炼机等。随着电力电子技术......
-
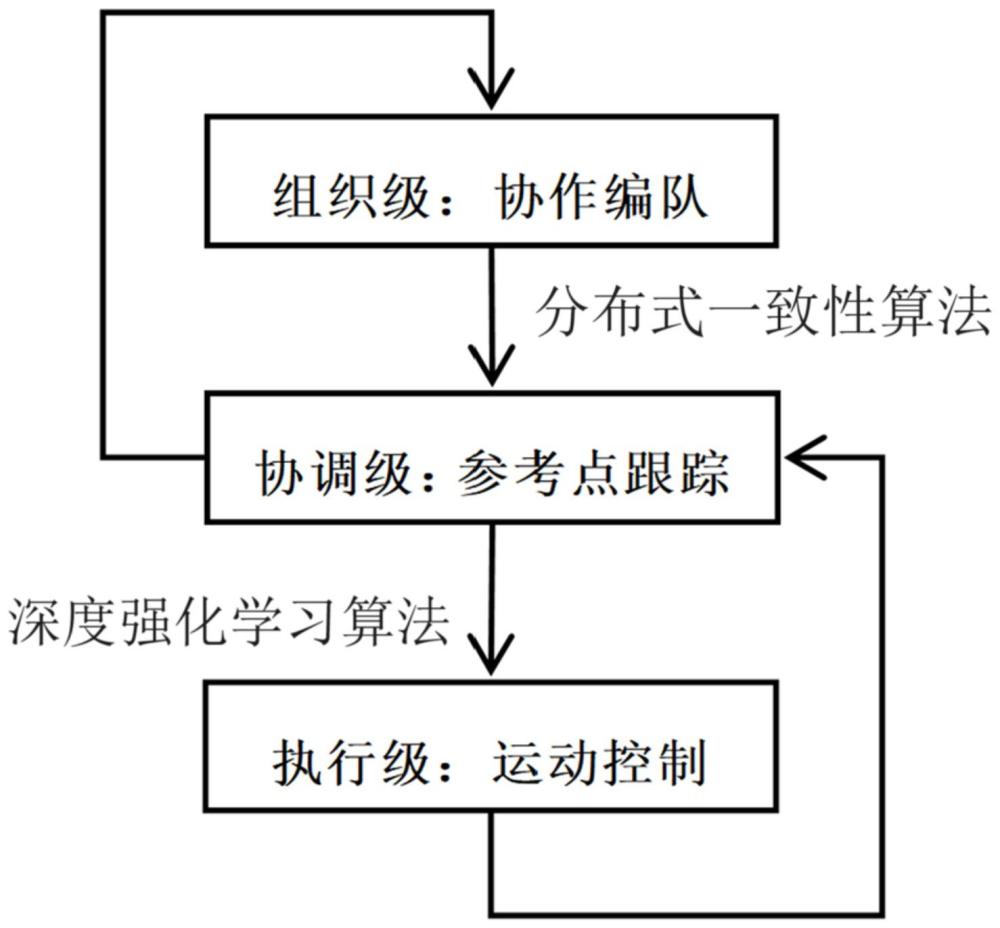
基于深度强化学习的多机器人分层编队控制方法及系统
本发明涉及非电变量的控制,具体涉及一种基于深度强化学习的多机器人分层编队控制方法及系统。背景技术:1、本部分的陈述仅仅是提供了与本发明相关的背景技术,并不必然构成现有技术。2、近几年来,随着控制、通信......
技术新讯 > 多机 > 列表
 2024-11-06
2024-11-06精选技术
-

用于T梁转运的装置及方法与流程
2024-08-02 -

电流互感器的性能评估方法及系统与流程
2024-09-14 -

小数据传输失败报告的制作方法
2024-10-15 -

一种河道工程用河道清淤搅动装置的制作方法
2024-07-09 -

调控叶轮组的制作方法
2024-07-30 -

一种数据丢失情况下无人水面航行器的航向控制方法
2024-08-01 -

吊架及空铁交通系统的制作方法
2024-08-01 -

一种高低压气瓶组合的氮气推进系统的制作方法
2024-08-01 -

一种船体上层建筑分段建造工艺的制作方法
2024-08-01 -
电磁加热蒸汽发生器的制作方法
2024-08-01