一种基于多机器人协作的任务分配系统
- 国知局
- 2024-11-06 14:23:37
本发明属于机器人任务分配,具体涉及一种基于多机器人协作的任务分配系统。
背景技术:
1、在复杂的现实动态环境中,由于环境变化、时间约束、资源分布不均等因素,多机器人系统需要在有限时间,有限资源的情况下解决资源分配,任务调度,行为协调,冲突消解等协调合作问题。智慧车间对多机器人协同作业、运输有新的需求。多机器人的研究重点在于使功能独立的机器人具有和人类似的合作意识,通过协商,合作,和协调,完成复杂的任务,解决单个机器人无法解决的问题。多机器人任务分配问题在生产调度、工业制造、军事打击等多领域都有广泛运用。
2、对于多机器人协同任务分配问题,解决思路主要有集中式决策、分布式决策、混合决策等方法。常用的集中式任务分配方法有传统搜索算法、整数规划方法、智能优化算法等。常用的分布式任务分配方法有基于市场机制的方法、基于空闲链的方法、阈值响应法等
3、多机器人任务分配方法多为集中式控制。多机器人系统存在集中分配者(主机器人或管理机器人),负责规划、决策和任务分配。任务分配时,机器人通过查询一张关于所有机器人信息的表格来直接指定或是协商完成任务的分配,现有的多机器人协作的任务分配时,难以做到高优先级任务优先得到执行,且路径规划也难以做到最优,进而执行任务的效率也不理想,存在一些局限性。
4、对此,发明人提出一种基于多机器人协作的任务分配系统,用以解决上述问题。
技术实现思路
1、本发明的目的在于提供一种基于多机器人协作的任务分配系统,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
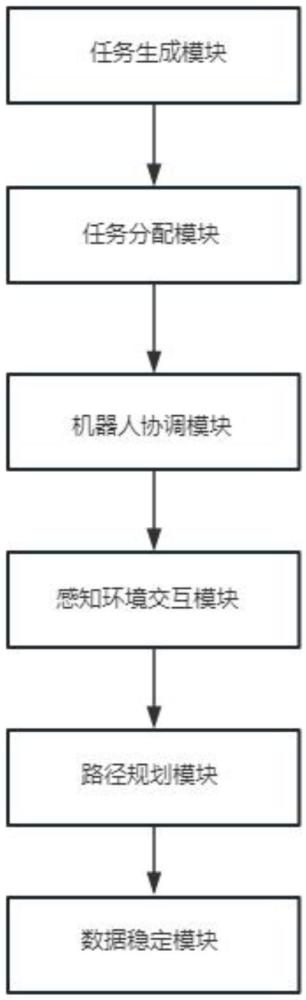
3、一种基于多机器人协作的任务分配系统,包括:
4、任务生成模块,定义和生成任务,包括任务的类型、任务优先级、时间限制和资源需求,将任务信息输入系统,确保系统对任务的全面理解;
5、任务分配模块,将复杂任务分解为多个可管理的子任务,分析机器人当前状态、能力和负载情况,将子任务合理分配给各机器人,利用机器学习算法分析历史任务数据,优化任务分配策略,提高效率;
6、机器人协调模块,使用多机器人协调方法,解决任务冲突、路径规划和协作问题,实现机器人之间以及机器人与中央控制系统之间的高效通信;
7、感知环境交互模块,集成多种传感器,感知环境信息,基于传感器数据构建环境模型,支持任务规划和路径规划,实时检测环境中的障碍物,并规划机器人路径以避开障碍;
8、路径规划模块,使用路径规划算法,确保机器人能够在复杂环境中找到最优路径,实时控制机器人移动,确保其按规划路径行驶,并进行路径调整,通过不断学习和适应环境变化,自动优化任务执行和协作策略;
9、数据稳定模块,通过区块链记录任务分配和执行的全过程,确保数据的不可篡改性和透明性,利用区块链技术实现机器人之间的去中心化协作,提高系统的鲁棒性和容错能力。
10、优选的,所述任务优先级计算表示为:
11、pi=wi
12、di
13、其中,pi表示任务i的优先级,wi表示任务的重要性权重,di表示任务的截止时间,增加某任务的权重wi会提高该任务的优先级,使其被优先分配和执行,降低权重则相反;
14、缩短截止时间d i会增加任务优先级,促使系统更快处理该任务,延长截止时间则会降低优先级。
15、优选的,所述复杂任务分解表示为:
16、t={t1,t2,...,tn}
17、即将复杂任务t分解成n个子任务t i
18、任务分配优化,通过线性规划或整数规划求解任务分配问题,目标函数为:
19、
20、约束条件为:
21、
22、其中,c i j表示任务i分配给机器人j的成本,x i j为二进制变量,表示任务i是否分配给机器人j。
23、优选的,所述机器学习算法为强化学习,定义一个值函数q(s,a),它表示在状态s下采取动作a所能获得的期望回报,通过不断更新这个值函数,学习到在不同状态下应该采取的最佳动作策略,表示为:
24、q(s,a)←(1-α)*q(s,a)+α*(r+γ*maxa'q(s',a'))
25、其中α是学习率,控制新信息对1信息的更新程度;
26、r是执行动作a后获得的即时回报;
27、v是折扣因子,用于平衡当前回报和未来回报的重要性;
28、s'是执行动作a后到达的新状态;
29、maxa'q(s'a”)是在新状态下采取所有可能动作中的最大q值,通过不断迭代更新q值,算法可以逐渐学习到最优的任务分配策略。
30、优选的,多机器人协调方法使用合作博弈论中的夏普利值来衡量每个机器人在协作中的贡献,表示为:
31、
32、其中φi(v)是机器人i的夏普利值,v(s)表示联盟s的价值。
33、优选的,所述构建环境模型基于传感器数据构建概率占据栅格地图:
34、
35、其中,p(mi∣zt,xt)表示在位置xt和测量zt条件下栅格mi被占据的概率。
36、优选的,所述路径规划算法使用启发式函数h(n)估计从节点n到目标节点的最小成本:
37、f(n)=g(n)+h(n)
38、其中,g(n)表示从起点到节点n的实际成本,f(n)为评估函数。
39、优选的,所述区块链技术使用工作量证明pow计算哈希值h,表示为:
40、h=hash(hprev,m,n)
41、其中,hprev为前一个区块的哈希值,m为当前区块的交易数据,n为随机数。
42、与现有技术相比,本发明的有益效果是:
43、(1)本发明根据任务权重和截止时间计算优先级,并使用整数规划优化任务分配,确保高优先级任务优先得到执行,采用夏普利值计算衡量机器人贡献,公平合理地进行任务分配,提高协作效率,使用激光雷达传感器构建占据栅格地图,并采用a*算法进行路径规划,提高路径规划的精度和效率。
44、(2)本发明通过实时监控任务执行情况,动态调整任务分配和执行策略,保持系统稳定性,利用区块链技术记录任务分配和执行过程,确保数据的透明性和不可篡改性。
技术特征:1.一种基于多机器人协作的任务分配系统,其特征在于,包括:
2.根据权利要求1所述的一种基于多机器人协作的任务分配系统,其特征在于:所述任务优先级计算表示为:
3.根据权利要求1所述的一种基于多机器人协作的任务分配系统,其特征在于:所述复杂任务分解表示为:
4.根据权利要求1所述的一种基于多机器人协作的任务分配系统,其特征在于:所述机器学习算法为强化学习,定义一个值函数q(s,a),它表示在状态s下采取动作a所能获得的期望回报,通过不断更新这个值函数,学习到在不同状态下应该采取的最佳动作策略,表示为:
5.根据权利要求1所述的一种基于多机器人协作的任务分配系统,其特征在于:多机器人协调方法使用合作博弈论中的夏普利值来衡量每个机器人在协作中的贡献,表示为:
6.根据权利要求1所述的一种基于多机器人协作的任务分配系统,其特征在于:所述构建环境模型基于传感器数据构建概率占据栅格地图:
7.根据权利要求1所述的一种基于多机器人协作的任务分配系统,其特征在于:所述路径规划算法使用启发式函数h(n)估计从节点n到目标节点的最小成本:
8.根据权利要求1所述的一种基于多机器人协作的任务分配系统,其特征在于:所述区块链技术使用工作量证明pow计算哈希值h,表示为:
技术总结本发明涉及机器人任务分配技术领域,具体公开了一种基于多机器人协作的任务分配系统,包括:任务生成模块、任务分配模块、机器人协调模块、感知环境交互模块、路径规划模块和数据稳定模块;本发明根据任务权重和截止时间计算优先级,并使用整数规划优化任务分配,确保高优先级任务优先得到执行,采用夏普利值计算衡量机器人贡献,公平合理地进行任务分配,提高协作效率,使用激光雷达传感器构建占据栅格地图,并采用A*算法进行路径规划,提高路径规划的精度和效率,通过实时监控任务执行情况,动态调整任务分配和执行策略,保持系统稳定性,利用区块链技术记录任务分配和执行过程,确保数据的透明性和不可篡改性。技术研发人员:刘益新,夏庆锋受保护的技术使用者:无锡学院技术研发日:技术公布日:2024/11/4本文地址:https://www.jishuxx.com/zhuanli/20241106/321780.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表