一种基于模糊自抗扰的热压焊电源温度控制方法
- 国知局
- 2024-10-21 15:16:30
本发明涉及热压焊电源焊接过程中焊头温度控制,具体涉及一种基于模糊自抗扰的热压焊电源温度控制方法。
背景技术:
1、近年来,热压焊由于具有加热时间短、热影响区较小、可实现多点同时焊接和易于实现自动化等优点,广泛应用于fpc(柔性电路板)to pcb、hsc(斑马纸)to fpc、hsc tolcd、tab to pcb等产品的连接。热压焊焊接过程中温度控制精度直接影响着焊接产品的质量。温度过高会导致焊接接头力学性能、蠕变强度及韧性下降;温度过低则会导致虚焊,焊接接头强度不足等问题。为了保障产品质量的稳定和一致性,对焊接过程中温度的精确控制具有十分重要的作用。目前工业控制上多采用pid算法,其具有结构简单、调整方便、工作可靠等优点,对于简单的线性系统控制更为适用。
2、热压焊温度控制环路混合了时滞和非线性环节,采用pid算法控制,具备一定的温度控制效果,但难以实现快速准确的控制,并且在系统中存在较大干扰和延迟时,单一的pid算法无法满足系统的控制需求,会导致控制温度存在较大的波动,不利于焊接接头成形。一种基于模糊自适应pid控制的高精度恒温控制器及方法(cn201510456159.9)是目前工业上的模糊pid温度控制算法,通过模糊原理自动调整pid参数,能够提升温度控制精度。但当输入系统存在较大扰动时,其对pid参数调整有限,不能快速准确的消除干扰带来的误差。
技术实现思路
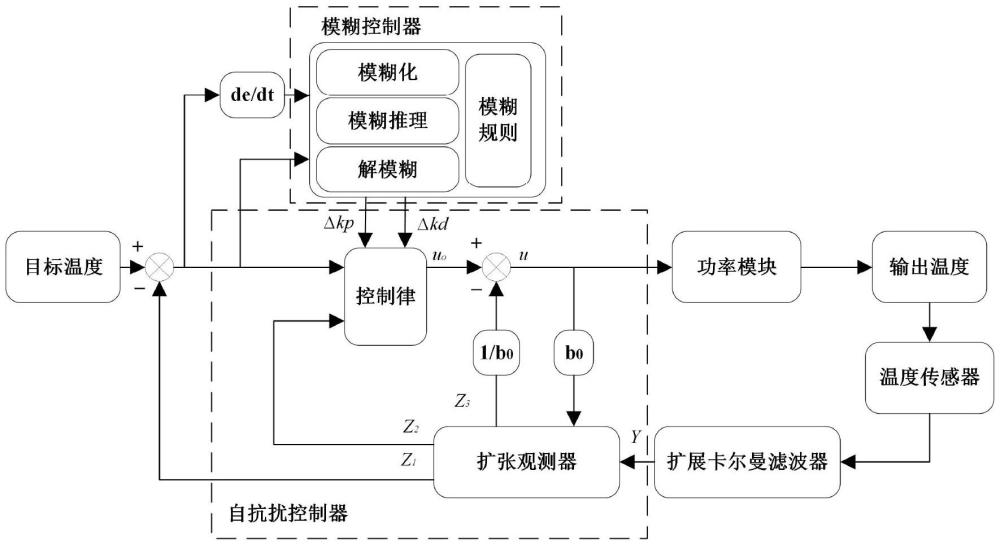
1、针对现有技术存在的技术问题,本发明目的是:基于背景技术中所提出的温度控制中使用模糊pid控制算法控制响应速度和精度不高,并且难以应对过程中大量非线性和扰动的问题。本发明提出了一种基于模糊自抗扰的热压焊电源温度控制方法,结合模糊控制算法和自抗扰控制算法,避免了控制器对系统模型的依赖,具有良好的控制效果和鲁棒性,控制器结构简单,参数易整定,便于实现。在实际的控制过程中利用扩张观测器对系统中的非线性、系统扰动和未建模部分组成总扰动进行估计,并设计控制律对系统总扰动进行消除。模糊控制器用于对控制律进行在线调节,进一步提升控制性能和抗干扰能力。
2、本发明至少通过如下技术之一实现。
3、一种基于模糊自抗扰的热压焊电源温度控制方法,包括以下步骤:
4、步骤a、持续对热压焊焊头施加恒定热量输入后,停止热量输入,测量其升温和降温曲线,将获取的数据送入matlab系统辨识工具进行系统辨识得到温度传感器的数学模型;
5、步骤b、根据所得到温度传感器数学模型,设计扩展卡尔曼滤波器,用以消除温度传感器温度测量的时滞效果和测量噪声,对测量温度进行补偿;
6、步骤c、将经扩展卡尔曼滤波器得到的最优估计温度和控制律输出的控制量送入模糊自抗扰控制器的扩张观测器中,用于对系统状态量和系统总扰动估计;
7、步骤d、将扩张观测器估计的温度与目标温度进行比较,得到当前温度控制系统的误差信号和误差变化率;
8、步骤e、将误差信号和误差变化率送入模糊控制器进行运算,得到控制律参数调整的增量,同时将误差信号和扩张观测器估计的系统状态量送入控制律中对控制量进行运算;
9、步骤f、将扩张观测器估计的系统总扰动代入控制量,消除系统总扰动,从而得到系统控制量,系统控制量控制热压焊电源功率模块热量输出,从而使得热压焊焊头温度保持在目标范围内。
10、进一步地,模糊自抗扰控制器的扩张观测器为三阶线性扩展状态观测器,其状态方程为:
11、
12、式中,t为时间;y(t)为扩展卡尔曼滤波器输出的最优估计温度;z1(t)为对y(t)的估计,z2(t)为对y(t)微分的估计,z3(t)为对系统总扰动的估计;和分别为z1(t),z2(t)和z3(t)的微分;e(t)为对y(t)观测误差;β1,β2和β3分别为各状态方程的误差增益参数,l=[β1β2β3]t组成观测器增益向量;u(t)为系统最终控制量输出;b为系统控制量系数;
13、所述观测器增益向量通过配置观测器极点确定,具体为通过配置观测器极点为s=-ω0,β1=3ω0,β3=ω03,其中ω0表示系统带宽。
14、进一步地,所述扩展卡尔曼滤波器的系统方程为:
15、
16、式中,y(k)为输出向量;w(k)和v(k)假设为互不相关的高斯白噪声,是过程噪声和测量噪声;a为状态矩阵;c为常数输出矩阵;x(k)为状态向量;k为系统第k个采样时刻;
17、扩展卡尔曼滤波器的系统矩阵a、状态向量x(k)和输出向量q以及协方差矩阵r如下:
18、
19、x(k)=[tm(k)ta(k)]t,y(k)=tm(k)
20、q=cov(w)=e{wwt}
21、r=cov(v)=e{vvt}
22、式中,b=1-a,τ为热电偶传感器的时间常数,τ0为采样时间;c为常数输出矩阵;tm为温度传感器测得的温度;ta为焊接构造温度;y(k)为扩展卡尔曼滤波器输出向量;k为系统第k个采样时刻;w和v为互不相关的高斯白噪声,是过程噪声和测量噪声。
23、进一步地,所述模糊控制器的输入为误差信号e1和误差变化率e2,输出为控制律比例系数增量δkp和微分系数增量δkd;
24、所述模糊控制器的模糊推理规则根据误差信号e1和误差变化率e2的大小调整控制律比例系数δkp和微分系数δkd。
25、进一步地,所述模糊控制器的调整控制律比例系数δkp和微分系数δkd的规则为:当误差信号e1较小时,增加δkp以提高系统的抗干扰性能;当误差信号e1较大时,增加δkd以提高系统响应;当误差变化率e2过大且差分饱和引起过调时,应降低δkd;根据输入误差信号e1和误差变化率e2,采用δkp和δkd来加速系统的响应。
26、进一步地,所述模糊控制器的隶属度函数为高斯型隶属度函数。
27、进一步地,所述模糊控制器的输入和输出论域的划分规则为:规定误差信号和误差变化率大于20℃过大,小于20℃为过小,将输入模糊论域设定为[-20,20],输出模糊论域设定为[-10,10]。
28、进一步地,所述控制律采用线性pd控制实现,即:
29、u0=kp1(r-z1)-kd1z2
30、其中,u0为控制律初步计算结果;r为目标温度;z1为对扩展卡尔曼滤波器输出y的估计,z2(t)为对y的微分的估计;kp1为比例系数;kd1为微分系数;kp1和kd1的初始值由带宽法确定,kd1=2ξωc,kp1=ωc2其中ξ为阻尼比,ωc为自然谐振频率。
31、进一步地,所述控制律系数经模糊控制器输出调整后描述为:
32、
33、其中:kp为调整后比例系数;kd为调整后微分系数;kp1为初始比例系数;kd1为初始微分系数;δkp为比例系数调整量;δkd为微分系数调整量。
34、进一步地,系统扰动消除通过扩张观测器估计的系统总扰动与控制律计算输出u0比较得到系统控制量u最终输出:
35、
36、其中,b0为对控制量系数b的估计;
37、控制律最终输出u在线调整后描述为:
38、
39、其中,kp为调整后比例系数;kd为调整后微分系数;e1为误差信号;z2为扩张观测器对扩展卡尔曼滤波器输出y的微分的估计;z3为扩张观测器对系统总扰动的估计;b0为对系统控制量系数的估计。
40、实现所述一种基于模糊自抗扰的热压焊电源温度控制方法的系统包括,包括模糊自抗扰控制器、扩展卡尔曼滤波器、温度传感器和功率模块;
41、所述功率模块在系统控制量的作用下,为热压焊电源提供能量输出。
42、所述温度传感器实时测量热压焊电源的温度输出,用作闭环控制的反馈数据。
43、所述扩展卡尔曼滤波器用于消除温度传感器采样温度的噪声和时间滞后,使最优估计温度尽可能接近实际温度。
44、所述模糊自抗扰控制器包括:
45、扩张观测器:对系统状态量和系统总扰动进行估计,提升热压焊电源系统抗干扰能力。
46、模糊控制器:根据温度误差信号和误差变化率,在线调节控制律系数,进一步加强了热压焊电源系统的扰动适应能力。
47、控制律模块:使用在线调整后的两个参数带入线性pd公式计算输出的控制量。
48、与现有的技术相比,本发明的有益效果为:
49、本发明将模糊控制和自抗扰控制相结合,在系统存在扰动时,使用扩张观测器对系统总扰动进行估计和消除;在温度控制的各个阶段,使用模糊控制器对控制律系数进行在线调节以提高热压焊电源的温度响应速度和控制精度。
50、应用本发明的模糊自抗扰控制方法,采集热压焊电源的实时温度输出,传输到扩展卡尔曼滤波器进行处理,经过扩张观测器、模糊控制器和控制律模块的运算得到系统最终控制量输出,作用于功率输出模块,从而实现精度高、速度快和抗干扰性能强的控制效果,大大提高了热压焊电源的焊接稳定性和一致性。
本文地址:https://www.jishuxx.com/zhuanli/20241021/321074.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表