一种三轴微机械陀螺的多路复用测控方法及其装置
- 国知局
- 2024-10-21 15:04:58
本发明涉及微机械陀螺,尤其涉及一种三轴微机械陀螺的多路复用测控方法及其装置。
背景技术:
1、微机械陀螺是一种以科氏力为敏感信号的角度或者角速度传感器,来实现物体自身的姿态测量,它具有体积小、功耗低、集成度高、可批量生产等特点,在消费市场和工业领域有着广泛的应用前景。近几年来,微机械陀螺快速向高性能、集成化方向发展,如商用的惯性导航单元,不仅具备导航级的性能,还能以极小的体积和功耗同时实现空间三轴角度的测量。
2、传统消费类的三轴微机械陀螺,将敏感结构集成在单一的硅片上实现,这极大降低了系统的功耗和体积,但由于其空间结构和控制链路的局限性,其性能也受到了极大的限制;而工业级及导航级的三轴陀螺,由于其测控系统本身的复杂性,需要三个单轴陀螺并且匹配三个数字信号处理芯片,以及需要严格的时钟约束才能实现独立稳定的控制,因此在体积、功耗、成本、调试难度上都受到限制。
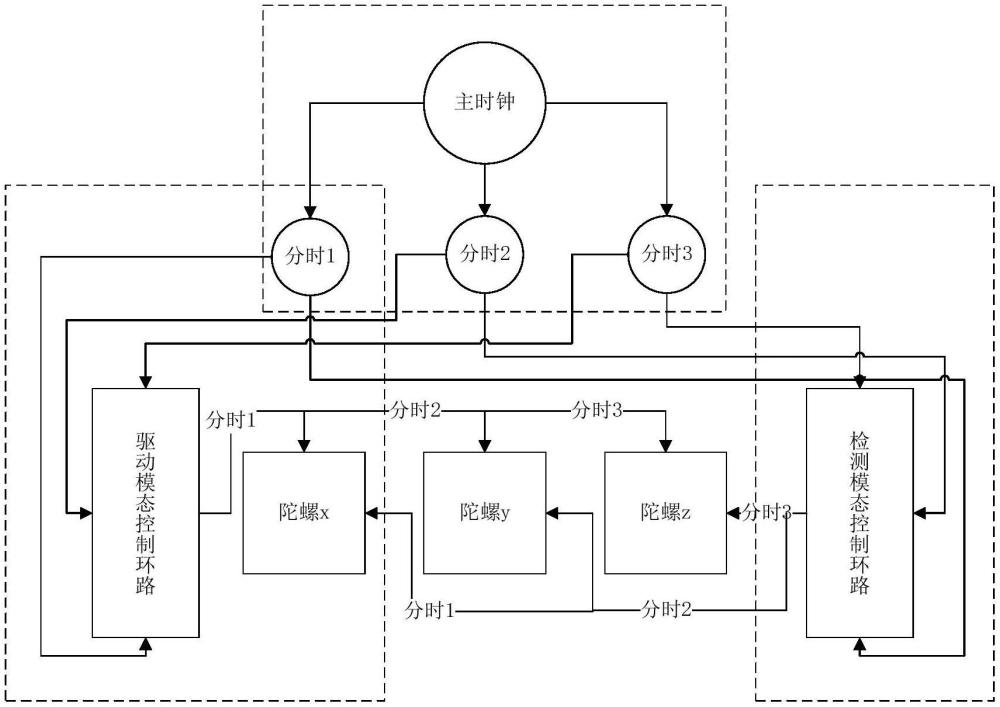
技术实现思路
1、本发明的目的是在保证系统测控精度的前提下,精简了系统的复杂度,成倍缩减了硬件资源的消耗,提供了一种三轴微机械陀螺的多路复用测控方法,并且设计开发了其应用的电路系统。
2、本发明的技术方案如下:
3、第一方面,本发明公开了一种三轴微机械陀螺的多路复用测控方法,包括如下步骤:
4、1)三轴微机械陀螺包括三个陀螺仪,现场可编程门阵列依据陀螺仪的工作时钟,设定3倍于工作时钟的主工作时钟,并以主工作时钟作为全局时钟;所述现场可编程门阵列包括坐标旋转数字计算模块;
5、2)在任一陀螺仪的工作时钟内,坐标旋转数字计算模块输出交流驱动信号、反馈力信号以及预设的参考相位信号和参考位移信号至该陀螺仪,并通过驱动模态控制环路与检测模态控制环路使所述陀螺仪达到力平衡状态,并得到该陀螺仪的角速度;
6、其中,三个陀螺仪分别在各自的工作时钟内复用同一个坐标旋转数字计算模块。
7、第二方面,本发明公开了一种实现所述测控方法的三轴微机械陀螺多路复用测控装置,包括一个三轴微机械陀螺、一个现场可编程门阵列、三个陀螺信号调理电路、三个数模转换器和三个数模转换器;
8、所述现场可编程门阵列分别与三个数模转换器和三个数模转换器相连,一个陀螺仪具有一个陀螺信号调理电路,每个陀螺信号调理电路分别与一个数模转换器以及一个模数转换器相连;所述陀螺信号调理电路包括驱动模态控制环路以及检测模态控制环路;
9、现场可编程门阵列内的所述坐标旋转数字计算模块用于输出交流驱动信号、反馈力信号以及预设的参考相位信号和参考位移信号;三轴微机械陀螺分时复用坐标旋转数字计算模块并通过三个陀螺仪各自的陀螺信号调理电路使三个陀螺仪均达到力平衡状态,并得到三个陀螺仪的角速度。
10、本发明与现有技术相比具有的有益效果是:
11、1)本发明的多路复用测控方法,使三个高性能微机械陀螺能分别同时进行驱动和闭环的力平衡控制,不仅保证了多轴陀螺的性能,而且较现有的三个控制器分别测控相比,复用了一个控制器资源,故极大减少了电路复杂度、降低了功耗和成本。
12、2)本发明的测控方法由于资源的复用,可以将现场可编程门阵列的更多资源用于精度更高的坐标旋转数字计算模块,该模块可以极大降低陀螺信号检测的噪声。
13、3)本发明的三轴微机械陀螺测控装置与现有测控电路相比,具有全数字化的特点,可以实现每路控制信号的编程控制,降低了模拟电路的复杂度,同时具备灵活性,可以用于其他各类高速高精密传感器的并发融合测控。
技术特征:1.一种三轴微机械陀螺的多路复用测控方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的三轴微机械陀螺的多路复用测控方法,其特征在于,初始时刻时,所述坐标旋转数字计算模块输出一个预设的交流驱动信号、参考相位信号和参考位移信号至陀螺仪内;在其他时刻,所述坐标旋转数字计算模块获取陀螺仪的位移信号并转换为数字信号,所述数字信号依次进行载波解调、正交解调、低通滤波及数模转换得到幅度和频率发生改变的交流驱动信号,坐标旋转数字计算模块将所述幅度和频率发生改变的交流驱动信号输入至所述陀螺仪,同时,所述坐标旋转数字计算模块输出预设的参考相位信号和参考位移信号至陀螺仪;通过锁相环和自动增益控制使该陀螺仪进行恒定幅值和频率的振动。
3.根据权利要求2所述的三轴微机械陀螺的多路复用测控方法,其特征在于,所述陀螺仪接收所述交流驱动信号并振动产生振动信号,所述陀螺仪拾取所述振动信号作为拾取信号,并对所述拾取信号根据接收到的预设的参考相位信号和参考位移信号进行闭环控制,通过锁相环和自动增益控制使所述陀螺仪进行恒定幅值和频率的振动。
4.根据权利要求3所述的三轴微机械陀螺的多路复用测控方法,其特征在于,所述陀螺仪对所述拾取信号进行解调,得到陀螺仪的位移信号和位移的相位信号;根据接收到的预设的参考相位信号对所述陀螺仪的位移的相位信号进行闭环控制,通过锁相环将陀螺仪固定在谐振状态;根据接收到的预设的参考位移信号对所述陀螺仪的位移信号进行闭环控制,通过自动增益控制使陀螺仪保持恒定的振幅。
5.根据权利要求2所述的三轴微机械陀螺的多路复用测控方法,其特征在于,所述坐标旋转数字计算模块获取陀螺仪进行恒定幅值和频率的振动时陀螺仪的位移信号并转换为数字信号,所述数字信号依次进行载波解调、角速度解调、低通滤波及数模转换得到反馈力信号,且坐标旋转数字计算模块将所述反馈力信号输入至所述陀螺仪,该陀螺仪通过检测模态控制环路获得该陀螺仪的角速度。
6.根据权利要求1所述的三轴微机械陀螺的多路复用测控方法,其特征在于,当陀螺仪达到力平衡状态时,所述陀螺仪的检测模态处于0位移状态。
7.一种实现权利要求5所述测控方法的三轴微机械陀螺多路复用测控装置,其特征在于,包括一个三轴微机械陀螺、一个现场可编程门阵列、三个陀螺信号调理电路、三个数模转换器和三个数模转换器;
8.根据权利要求7所述的三轴微机械陀螺多路复用测控装置,其特征在于,所述坐标旋转数字计算模块的流水线级数为3×3n;其中,n为正整数。
技术总结本发明公开了一种三轴微机械陀螺的多路复用测控方法及其装置,方法包括首先生成全局时钟;在任一陀螺仪的工作时钟内,坐标旋转数字计算模块输出交流驱动信号、反馈力信号以及预设的参考相位信号和参考位移信号至该陀螺仪,并通过驱动模态控制环路与检测模态控制环路使所述陀螺仪达到力平衡状态,并得到该陀螺仪的角速度;三个陀螺仪分别在各自的工作时钟内复用同一个坐标旋转数字计算模块。本发明利用时分复用与坐标旋转数字计算算法结合的方式,在有限的现场可编程逻辑门阵列资源中,能够实时精确地对三轴微机械陀螺分别进行同步检测和闭环控制,该方法及装置可被广泛应用于多轴或者多路高速、高精密、高集成度的测控仪器的并发处理需求。技术研发人员:郑旭东,沈耀杰,金仲和,王雪同受保护的技术使用者:浙江大学技术研发日:技术公布日:2024/10/17本文地址:https://www.jishuxx.com/zhuanli/20241021/320432.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表