一种飞行器关键状态设计与判断系统和方法与流程
- 国知局
- 2024-10-21 15:01:06
本发明航天,特别是一种飞行器关键状态设计与判断系统和方法,可用于飞行器在轨自主运行管理等应用场景。
背景技术:
1、随着人类航天事业的不断发展和航天活动的日益频繁,飞行器在轨的测控保障资源日渐紧张。为了保证飞行器在轨正常运行,对飞行器在轨自主运行管理提出了迫切的需求。
2、飞行器为了提高可靠性,通常会对单机进行冗余设计,从而避免单点故障。单机会输出数字量遥测表征自身的运行状态。同时,飞行器会通过模拟量采集电路对单机状态进行监测。因此,飞行器为了实现在轨自主运行管理,需要准确可靠地获取自身关键状态。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,提供了一种飞行器关键状态设计与判断系统和方法,实现利用多种途径获取关键状态信息,避免单点、误码等因素影响关键状态的判断,提高状态判断的可靠性。
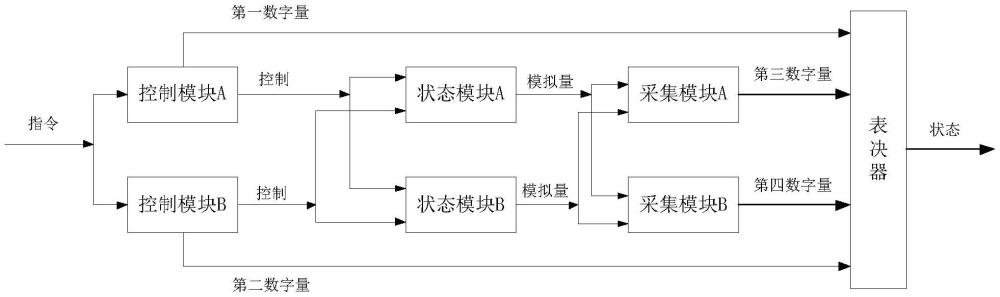
2、本发明的技术解决方案是:一种飞行器关键状态设计与判断系统,包括控制模块a、控制模块b、状态模块a、状态模块b、采集模块a、采集模块b和表决器;
3、控制模块a和控制模块b同步接收关键状态指令,根据关键状态指令输出第一数字量和第二数字量至表决器;控制模块a同时对状态模块a和状态模块b进行控制,控制模块b同时对状态模块a和状态模块b进行控制;
4、状态模块a和状态模块b为并联关系,状态模块a和状态模块b在控制下,改变自身状态,在不同状态下输出不同的模拟量范围;
5、采集模块a同时采集状态模块a和状态模块b的模拟量范围,采集模块b同时采集状态模块a和状态模块b的模拟量范围,根据采集到的模拟量范围进行状态判断后,分别输出第三数字量和第四数字量至表决器;
6、表决器根据第一数字量、第二数字量、第三数字量和第四数字量对关键状态进行综合判断并给出判断结果。
7、进一步,所述关键状态指令包括设置与取消两类:
8、当关键状态指令为设置类指令时,控制模块a输出第一数字量为1,控制模块b输出第二数字量为1;
9、当关键状态指令为取消类指令时,控制模块a输出第一数字量为0,控制模块b输出第二数字量为0。
10、进一步,当关键状态指令为设置类指令时,状态模块a和状态模块b设置自身为第一状态,输出的模拟量范围均为[x1,x2];
11、当关键状态指令为取消类指令时,状态模块a和状态模块b设置自身为第二状态,输出的模拟量范围均为[x3,x4]。
12、进一步,当关键状态指令为设置类指令时,采集模块a采集到状态模块a的模拟量范围记为[aa1,aa2],采集模块a采集到状态模块b的模拟量范围记为[ab1,ab2],采集模块b采集到状态模块a的模拟量范围记为[ba1,ba2],采集模块b采集到状态模块b的模拟量范围记为[bb1,bb2];
13、当关键状态指令为取消类指令时,采集模块a采集到状态模块a的模拟量范围记为[aa3,aa4],采集模块a采集到状态模块b的模拟量范围记为[ab3,ab4],采集模块b采集到状态模块a的模拟量范围记为[ba3,ba4],采集模块b采集到状态模块b的模拟量范围记为[bb3,bb4]。
14、进一步,采集模块a根据采集到的模拟量范围进行状态判断,当采集到的状态模块a的模拟量范围[aa1,aa2]=[x1,x2]或采集到的状态模块b的模拟量范围[ab1,ab2]=[x1,x2]时,输出第三数字量为1;当采集到的状态模块a的模拟量范围[aa3,aa4]=[x3,x4]且采集到的状态模块b的模拟量范围[ab3,ab4]=[x3,x4]时,输出第三数字量为0;
15、采集模块b根据采集到的模拟量范围进行状态判断,当采集到的状态模块a的模拟量范围[ba1,ba2]=[x1,x2]或采集到的状态模块b的模拟量范围[bb1,bb2]=[x1,x2]时,输出第四数字量为1;当采集到的状态模块a的模拟量范围[ba3,ba4]=[x3,x4]且采集到的状态模块b的模拟量范围[bb3,bb4]=[x3,x4]时,输出第四数字量为0。
16、进一步,表决器根据第一数字量、第二数字量、第三数字量和第四数字量对关键状态进行综合判断,当有任意3路数字量为1时,判断结果为设置类指令执行正常,输出正常状态ⅰ,当有任意3路数字量信息为0时,判断结果为取消类指令执行状态正常,输出正常状态ⅱ,其余情况下表决器输出状态保持上一次输出状态不变。
17、本发明还提供一种利用上述飞行器关键状态设计与判断系统进行关键状态的判断方法,具体包括以下步骤:
18、生成关键状态指令,同时发送至控制模块a和控制模块b;
19、控制模块a和控制模块b进行关键状态指令控制响应:当收到设置类指令时,控制模块a输出数字量1至表决器,向状态模块a和状态模块b同时发送设置类控制信号;控制模块b输出数字量1至表决器,向状态模块a和状态模块b同时发送设置类控制信号;当收到取消类指令时,控制模块a输出数字量0至表决器,向状态模块a和状态模块b同时发送取消类控制信号;控制模块b输出数字量0至表决器,向状态模块a和状态模块b同时发送取消类控制信号;
20、状态模块a和状态模块b进行控制指令状态响应:当收到设置类控制信号时,状态模块a和状态模块b设置自身为第一状态,输出的模拟量范围均为[x1,x2];当收到取消类控制信号时,状态模块a和状态模块b设置自身为第二状态,输出的模拟量范围均为[x3,x4];
21、采集模块a和采集模块b进行状态采集和判断:当关键状态指令为设置类指令时,采集模块a采集到状态模块a的模拟量范围记为[aa1,aa2],采集模块a采集到状态模块b的模拟量范围记为[ab1,ab2];当关键状态指令为取消类指令时,采集模块a采集到状态模块a的模拟量范围记为[aa3,aa4],采集模块a采集到状态模块b的模拟量范围记为[ab3,ab4];若采集到的状态模块a的模拟量范围[aa1,aa2]=[x1,x2]或采集到的状态模块b的模拟量范围[ab1,ab2]=[x1,x2],则采集模块a输出数字量1至表决器;若采集到的状态模块a的模拟量范围[aa3,aa4]=[x3,x4]且采集到的状态模块b的模拟量范围[ab3,ab4]=[x3,x4],则采集模块a输出数字量为0至表决器;当关键状态指令为设置类指令时,采集模块b采集到状态模块a的模拟量范围记为[ba1,ba2],采集模块b采集到状态模块b的模拟量范围记为[bb1,bb2];当关键状态指令为取消类指令时,采集模块b采集到状态模块a的模拟量范围记为[ba3,ba4],采集模块b采集到状态模块b的模拟量范围记为[bb3,bb4];若采集到的状态模块a的模拟量范围[ba1,ba2]=[x1,x2]或采集到的状态模块b的模拟量范围[bb1,bb2]=[x1,x2],采集模块b输出数字量1至表决器;当采集到的状态模块a的模拟量范围[ba3,ba4]=[x3,x4]且采集到的状态模块b的模拟量范围[bb3,bb4]=[x3,x4]时,采集模块b输出数字量0至表决器;
22、表决器对关键状态进行综合判断并给出判断结果:当有任意3路数字量为1时,判断结果为设置类指令执行正常,输出正常状态ⅰ,当有任意3路数字量信息为0时,判断结果为取消类指令执行状态正常,输出正常状态ⅱ,其余情况下表决器输出状态保持上一次输出状态不变。
23、本发明与现有技术相比的优点在于:
24、采用冗余备份、数字量与模拟量相结合的设计思路,通过多路信号“四取三”的综合判断,进而获取飞行器关键状态,降低了因系统部分故障、信号传输误码等因素对关键状态判断的影响,提高了飞行器关键状态在轨自主管理的可靠性,可应用于对飞行器能源、控制、热控等影响任务成败的关键功能的自主判断,为测控资源日渐紧张的现状提供解决办法。
本文地址:https://www.jishuxx.com/zhuanli/20241021/320184.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。