一种基于数据分析的加药除磷设备及智能控制方法与流程
- 国知局
- 2024-10-21 15:00:57
本发明涉及废水处理加药除磷领域,具体涉及一种基于数据分析的加药除磷设备及智能控制方法。
背景技术:
1、磷,作为一种关键的水体营养元素,在水生生态系统中扮演着举足轻重的角色。然而,一旦其含量超过水体自然的承受能力,便会促使藻类异常繁盛,从而触发一系列的环境问题,即水体富营养化。这种富营养化现象不仅严重威胁着水体的生态平衡,对水生环境造成严重的污染,而且更进一步地,它会破坏水体中原本稳定的溶解氧平衡,最终导致水体发黑发臭,形成令人堪忧的黑臭水体。
2、随着城市化进程的加速和工业化生产的不断发展,污水排放造成的环境污染问题日益严重。市政污水中含有大量的含磷有机物,主要来源于人体排泄、含磷洗涤剂、含磷化肥和农药等,磷的超标排放会导致水体富营养化,对水体环境造成破坏。因此,为了有效处理污水中的磷,减少其对环境的污染,加药除磷技术应运而生。生物除磷主要是利用聚磷菌在好氧环境下,通过聚-β-羟基丁酸盐氧化分解所释放的能量来摄取污水中的磷,并将其合成聚磷酸盐贮存于细胞中。这种方法对有机磷的处理效果较好,但存在一些局限。例如,生物除磷技术对废水组分的过度依赖,稳定性和灵活性较差,对污泥体积指数也有影响。此外,生物除磷工艺目前还不能保证稳定达标出水要求,且需要一定的周期进行微生物菌群的培养。
3、由于污水中磷含量的波动,为了达到预设的除磷效果,污水处理厂可能会选择增加除磷剂的投加量。特别是在磷含量较高的时段,为了确保出水磷浓度达标,操作人员可能会过度依赖化学除磷,从而导致除磷剂过量投加。操作人员的经验和技术水平也会对除磷剂的投加量产生影响。由于不同操作人员对于除磷剂投加量的把握可能存在差异,有些操作人员可能会基于经验或保守的心态而增加除磷剂的投加量,以确保出水磷浓度的稳定达标。
4、过量投加不仅造成资源的巨大浪费,还会导致污泥产量增加的问题。
技术实现思路
1、本发明的目的在于提供一种基于数据分析的加药除磷设备及智能控制方法,解决过量投加不仅造成资源的巨大浪费,还会导致污泥产量增加的技术问题。
2、本发明的目的可以通过以下技术方案实现:
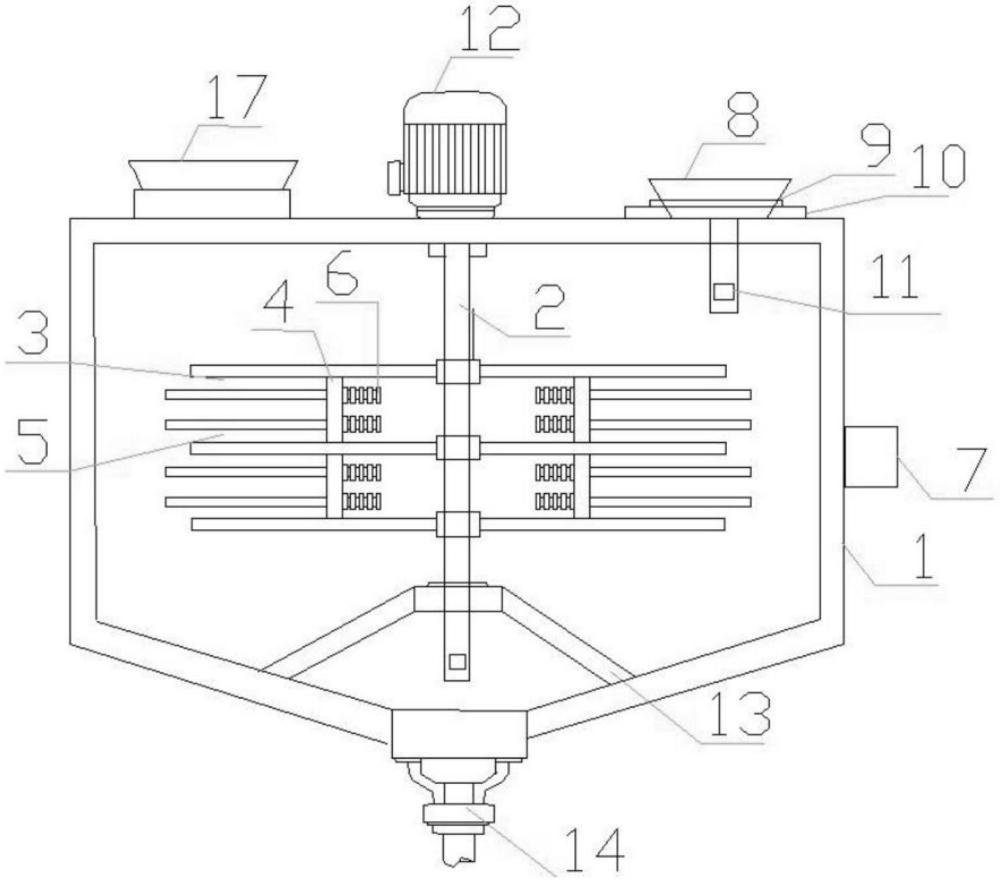
3、一种基于数据分析的加药除磷设备,包括箱体和控制器,所述箱体内设置有搅拌组件,所述箱体顶部一侧设置有加药组件,所述搅拌组件和加药组件与控制器电性连接,所述箱体的顶部另一侧开设有进水口,所述箱体的底部开设有出水口,所述出水口的底部固定设置有阀门;
4、所述搅拌组件包括:
5、转轴,所述转轴竖直布置并转动安装在所述箱体的内部;
6、搅拌杆,所述搅拌杆设置有多个,且多个搅拌杆均均固定安装至所述转轴上;
7、驱动电机,所述驱动电机固定安装于所述箱体的顶部,且与所述转轴传动连接,所述驱动电机内安装有测速传感器;
8、承载架,所述承载架固定设置在所述箱体的底部内壁,所述转轴的底部转动安装在承载架上。
9、作为进一步的技术方案,所述搅拌组件还包括:
10、连接杆,所述连接杆设置有多个,两上下相邻的所述搅拌杆之间均固定设置有一个连接杆;
11、随动杆,所述随动杆滑动安装在所述连接杆上,且一端贯穿所述连接杆;
12、弹簧,所述弹簧与所述随动杆贯穿出所述连接杆的一端固定连接,所述弹簧用于限制所述随动杆脱离所述连接杆。
13、作为进一步的技术方案,所述加药组件包括:
14、支架,所述支架固定设置在所述箱体顶部一侧;
15、称重传感器,所述称重传感器设置在所述支架上;
16、料斗,所述料斗设置在所述称重传感器上,且所述料斗的底部延伸进所述箱体内部;
17、电磁阀,所述电磁阀固定设置在所述料斗的底部。
18、作为进一步的技术方案,所述箱体上固定设置有透明观察窗,所述透明观察窗竖直布置,且所述透明观察窗一侧对应设置有刻度标识。
19、作为进一步的技术方案,所述箱体内侧壁上还设置有刮壁组件,所述刮壁组件用于对所述箱体的内壁进行刮动,所述刮壁组件包括:
20、电动伸缩杆,所述电动伸缩杆的底端固定设置在所述箱体的内顶壁上;
21、刮壁板,所述刮壁板可拆卸固定在所述电动伸缩杆的伸缩端上,且所述刮壁板的侧端与所述箱体内侧壁相贴合设置,所述刮壁板倾斜设置,且所述刮壁板越远离所述箱体内侧壁高度越低。
22、一种基于数据分析的加药除磷设备的智能控制方法,该智能控制方法步骤如下:
23、s1:通过监测进出水水质及水量、二沉池水质、加药量作为数据库进行神经网落模型训练,输出值为预测加药量;
24、s2:根据预测加药量按照处理规则确定药剂量和清水量;
25、s3:将确定的清水量通过计量泵从箱体的进水口输入到箱体内;
26、s4:根据确定的药剂量与料斗、药剂总重量之间的差值确定设定值,控制电磁阀打开,此时料斗内部的药剂会通过其底部向箱体内部输送,在料斗输送药剂过程中,料斗和药剂的总重量在逐渐减小,当减小到设定值时,称重传感器会将信号传递给控制器,控制器将信号处理后,再控制电磁阀关闭;
27、s5:根据药剂量和清水量计算获得箱体内转轴的预测转速,将预测转速与转轴实际转速进行比较,根据比较结果判断转轴转速与预测加药量是否匹配;
28、s6:若转轴转速与预测加药量不匹配,则对驱动电机的转速进行调高,否则,保持驱动电机当前转速。
29、作为进一步的技术方案,所述步骤s5中的工作过程为:
30、通过公式:计算获得预测转速rk,式中w为转化系数,fs为清水量,fy为药剂量,fz为箱体总容量,α、β、γ为预设权重系数;
31、将计算获得的预测转速rk与转轴实际转速rt进行比较:
32、其中rt=rn*θ;式中,rn为驱动电机的转速值,θ为传动比;
33、若rk>rt,则判断当前转轴转速与预测加药量不匹配;
34、若rk≤rt,则判断当前转轴转速与预测加药量相匹配。
35、作为进一步的技术方案,所述步骤s5的工作过程还包括:
36、当rk>rt时,将与1比较,若则按照提升量为进行转轴转速的提升;式中,c为预设参考值,r0为单位转速调节量;再将代入rt=rn*θ中,得到驱动电机转速的提升量;
37、否则,维持驱动电机当前转速。
38、作为进一步的技术方案,所述智能控制方法还包括步骤s7:
39、获取实际药剂量与确定药剂量之间的差值yx,及实际清水量与确定清水量之间的差值qx;
40、获取实际加药量和预测加药量之间的差值ex;
41、通过公式:
42、
43、计算获得加药量误差系数g;式中,ρ1、ρ2、ρ3为预设比例系数;
44、将计算获得的加药量误差系数g与预设误差阈值gth进行比较;
45、若g≤gth,则判断箱体内壁存在药液附着情况,控制刮壁组件对箱体内壁进行刮动;
46、若g>gth,则判断箱体内壁不存在药液附着情况。
47、本发明的有益效果:
48、(1)通过设置搅拌组件和加药组件,从而能够对加药量进行精确控制,起到防止除磷剂药量过多的作用,并且利用加药组件和搅拌组件相配合,当加药组件内加入的药剂量越多,则搅拌组件实现更大范围和更快的转轴转速,将进水口内进入的清水与药剂充分搅拌混合,提高除磷剂的混合效果;具体的,通过驱动电机带动转轴转动,转轴带动搅拌杆转动,搅拌杆在搅拌的过程中随着转轴的转速变化而产生不同大小的离心力,因此会是的随动杆在连接杆上向箱体内侧壁伸长的长度不同,进而不同的搅拌范围,以适应不同药剂量的转轴转速和搅拌范围,增强药剂和清水的混合效果;
49、(2)通过设置加药组件,在需要向箱体内部加入药剂时,可以提前确定加入的药剂量,然后控制电磁阀打开,此时料斗内部的药剂会通过其底部向箱体内部输送,在料斗输送药剂过程中,料斗和药剂的总重量在逐渐减小,当减小到一定值时,称重传感器会将信号传递给控制器,控制器将信号处理后,再控制电磁阀关闭,此时料斗的底部会无法向箱体内部输送药剂,此料斗和药剂总重量的前后差值即为提前确定加入的药剂量,通过电磁阀和称重传感器等设置,可以实现精确加药处理,便于相应浓度药液的配制;
50、(3)从药剂量和清水量两个源头精准控制配比,从而提高除磷剂投加量的准确性,并且能够将药剂量和清水量进行结合,对转轴转速进行预测,根据预测转轴转速和实际转轴转速之间比较,进行转轴转速的实时调整,达到最佳的转轴转速,提升药剂量和清水之间的混合均匀性。
51、附图说明
52、下面结合附图对本发明作进一步的说明。
53、图1为本发明的箱体内部结构示意图;
54、图2为本发明中透明观察窗和刻度标识位置示意图;
55、图3为本发明中刮壁组件的结构示意图;
56、图4为本发明的方法步骤图。
本文地址:https://www.jishuxx.com/zhuanli/20241021/320173.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表