一种长航时无人机执行任务过程的优化方法和优化系统
- 国知局
- 2024-10-21 15:00:38
本技术属于无人机领域,尤其涉及一种长航时无人机执行任务过程的优化方法和优化系统。
背景技术:
1、近年来,无人机作为一种先进的飞行设备,已经在军事打击,侦察监视,通信中继、灾难管理,遥感(rs)测绘等多个领域展现出了其强大的应用潜力。按照续航能力分类,无人机通常可以划分为短航时和长航时两大类。短航时无人机受限于其载荷和能源配置,其飞行速度较慢,飞行距离较短;长航时无人机具备较长的飞行航时和较广的覆盖范围,从而能够执行更为持久和广域的任务。因此,各国研发了多种型号的长航时无人机,如中国的彩虹-5,美国的rq-4全球鹰、mq-9死神无人机等。
2、目前长航时无人机具有一定智能化和自主性特征,可以实现由人工设定航线后,自动沿航线进行巡航飞行、避障等,但现阶段在长时间飞行中,长航时无人机依然需要人的监控,并且还无法让机载计算机自动执行攻击、侦察、监视等军事任务,依然需要操作员通过地面站发送指令控制无人机执行任务,属于人在回路中的指挥控制模式。例如,诺斯洛普·格鲁门公司生产的rq-4全球鹰无人机,它在起飞后由飞行员和图像感应器操作员在gcs中操作无人机飞行、使用机载感应器开展侦察活动。
3、由于长航时无人机操作员数量的紧缺造成了gcs控制资源的有限,这会导致可执行任务的无人机数量有限,无法发挥多无人机作战的优势。因此,在无人机任务规划时需要考虑控制资源的约束,以及控制资源的分配。
4、目前关于多无人机任务规划问题已经得到了很好的研究,学者们已经研究了许多种任务规划算法,如mathematical programming、启发式算法等。但据我们所知,当前研究大多针对于短航时无人机,均基于假设:无人机具有完全自主智能无需控制资源,或无人机控制资源充足。而实际军事应用中,长航时无人机不具备完全自主性,部分阶段需要gcs介入控制。在gcs与无人机的关系中,目前研究只考虑过地面站与无人机之间一对一固定匹配,未曾认识到无人机和地面站之间存在灵活匹配机制。
技术实现思路
1、本发明实施例的主要目的在于提供一种长航时无人机执行任务过程的优化方法和优化系统,通过设置的三阶段优化算法,在考虑多长航时无人机以及多种变量的情况下,可以快速准确的获取优化方案。
2、第一方面,提供了一种长航时无人机执行任务过程的优化方法,优化方法包括:
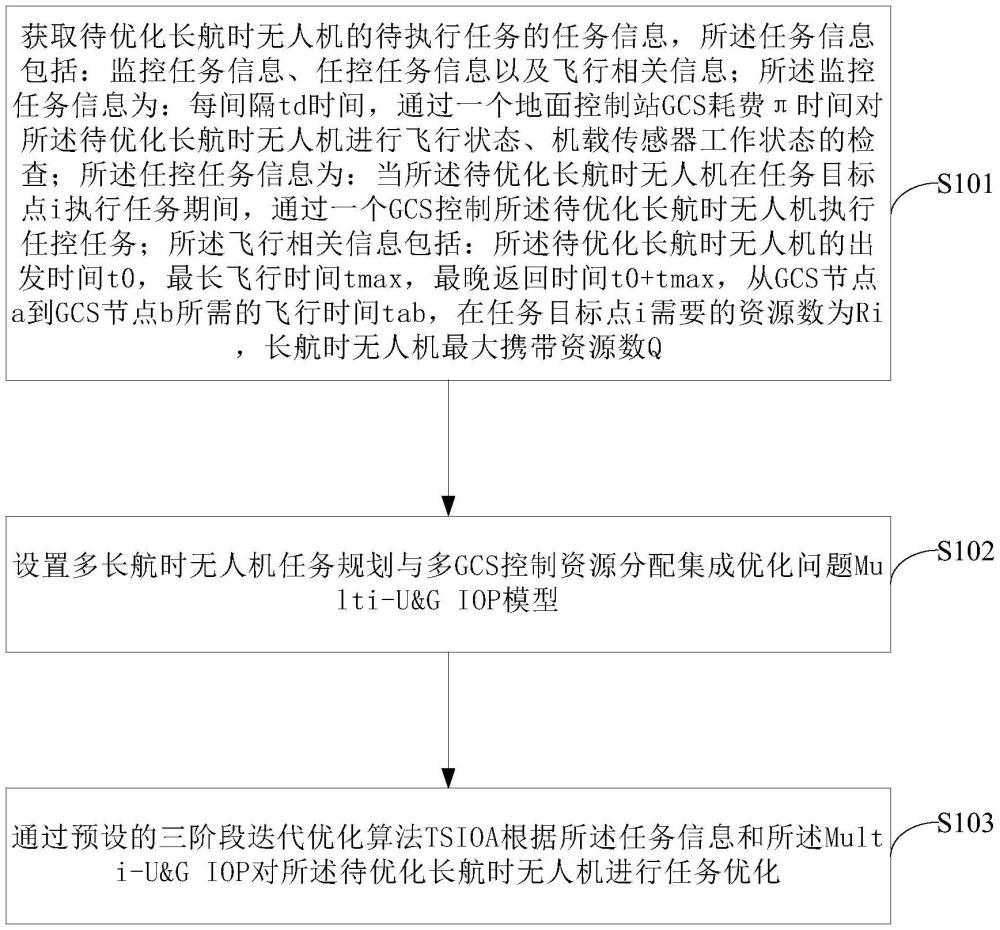
3、获取待优化长航时无人机的待执行任务的任务信息,所述任务信息包括:监控任务信息、任控任务信息以及飞行相关信息;所述监控任务信息为:每间隔td时间,通过一个地面控制站gcs耗费π时间对所述待优化长航时无人机进行飞行状态、机载传感器工作状态的检查;所述任控任务信息为:当所述待优化长航时无人机在目标点i执行任务期间,通过一个gcs控制所述待优化长航时无人机执行目标任务;所述飞行相关信息包括:所述待优化长航时无人机的出发时间最长飞行时间tmax,最晚返回时间从gcs节点a到gcs节点b所需的飞行时间tab,在任务目标点i需要的资源数为ri,长航时无人机最大携带资源数q;
4、设置多长航时无人机任务规划与多gcs控制资源分配集成优化问题multi-u&giop模型;
5、通过预设的三阶段迭代优化算法tsioa根据所述任务信息和所述multi-u&g iop对所述待优化长航时无人机进行任务优化。
6、在一个可能的实现方式中,所述通过预设的tsioa根据所述任务信息和所述multi-u&g iop对所述待优化长航时无人机进行任务优化,包括:
7、通过预设的混合遗传算法hga获取所述待优化长航时无人机的第一任务规划,所述第一任务规划为任控任务规划;
8、通过预设的轻量化混合整数线性规划模型和启发式调整策略获取所述待优化长航时无人机的第二任务规划,所述第二任务规划为监控任务规划;
9、通过预设的启发式方法根据所述第一、二任务规划进行所述任控任务和监控任务的下发。
10、在一个可能的实现方式中,所述通过预设的混合遗传算法hga获取所述待优化长航时无人机的第一任务规划,所述第一任务规划为任控任务规划,包括:
11、获取所述multi-u&g iop模型的初始解;
12、通过ls-vnd改变所述初始解的领域结构集,获取已优化初始解;
13、通过预设的适应度函数对所述已优化初始解进行检测。
14、在一个可能的实现方式中,所述通过预设的轻量化混合整数线性规划模型milp和启发式调整策略获取所述待优化长航时无人机的第二任务规划,所述第二任务规划为监控任务规划:
15、对所述的轻量化milp模型进行求解,决策监控任务;
16、根据所述待优化长航时无人机的任务序列的开始时间分布的统计四分位数,设计一种启发式策略以解决milp模型没有可行解的情况,所述可行解为所述第二任务规划。
17、在一个可能的实现方式中,所述通过预设的启发式方法根据所述第一、二任务规划进行所述任控任务和监控任务的下发,包括:
18、将目标、监控任务根据启动时间按升序排列,获取任务集合h;
19、获取所述任务集合h的最小任务h,并根据预设的分配原则进行任务分配,所述分配原则包括:获取gcs的工作时间总量tasks,对所有gcs依据所述tasks进行升序排序;获取tasks最小的gcs,并获取所述最小gcs的工作状态,如果工作状态为空闲,则直接向所述最小gcs分配所述h,如果总过状态为繁忙,则获取所述最小gcs正在执行的任务的完成时间,如果所述完成时间晚于所述h的开始时间,则将所述h分配到tasks第二小的gcs。
20、第二方面,提供了一种长航时无人机执行任务过程的优化系统,优化系统包括:
21、任务信息获取模块,用于获取待优化长航时无人机的待执行任务的任务信息,所述任务信息包括:监控任务信息、任控任务信息以及飞行相关信息;所述监控任务信息为:每间隔td时间,通过一个地面控制站gcs耗费π时间对所述待优化长航时无人机进行飞行状态、机载传感器工作状态的检查;所述任控任务信息为:当所述待优化长航时无人机在任务目标点i执行任务期间,通过一个gcs控制所述待优化长航时无人机执行任控任务;所述飞行相关信息包括:所述待优化长航时无人机的出发时间最长飞行时间tmax,最晚返回时间从gcs节点a到gcs节点b所需的飞行时间tab,在任务目标点i需要的资源数为ri,长航时无人机最大携带资源数q;
22、multi-u&g iop模型设置模块,用于设置多长航时无人机任务规划与多gcs控制资源分配集成优化问题multi-u&g iop模型;
23、任务优化模块,用于通过预设的三阶段迭代优化算法tsioa根据所述任务信息和所述multi-u&g iop对所述待优化长航时无人机进行任务优化。
24、在一个可能的实现方式中,所述任务优化模块,包括:
25、第一任务规划获取单元,用于通过预设的混合遗传算法hga获取所述待优化长航时无人机的第一任务规划,所述第一任务规划为任控任务规划;
26、第二任务规划获取单元,用于通过预设的轻量化混合整数线性规划模型和启发式调整策略获取所述待优化长航时无人机的第二任务规划,所述第二任务规划为监控任务规划;
27、任务下发单元,用于通过预设的启发式方法根据所述第一、二任务规划进行所述任控任务和监控任务的下发。
28、在一个可能的实现方式中,所述第一任务规划获取单元,包括:
29、初始解获取单元,用于获取所述multi-u&g iop模型的初始解;
30、已优化初始解获取单元,用于通过ls-vnd改变所述初始解的领域结构集,获取已优化初始解;
31、检测单元,用于通过预设的适应度函数对所述已优化初始解进行检测。
32、在一个可能的实现方式中,所述第二任务规划获取单元,包括:
33、监控任务决策单元,用于对所述的轻量化milp模型进行求解,决策监控任务;
34、第二任务规划单元,用于根据所述待优化长航时无人机的任务序列的开始时间分布的统计四分位数,设计一种启发式策略以解决milp模型没有可行解的情况,所述可行解为所述第二任务规划。
35、在一个可能的实现方式中,所述任务下发单元,包括:
36、任务集合获取单元,用于将目标、监控任务根据启动时间按升序排列,获取任务集合h;
37、任务分配单元,用于获取所述任务集合h的最小任务h,并根据预设的分配原则进行任务分配,所述分配原则包括:获取gcs的工作时间总量tasks,对所有gcs依据所述tasks进行升序排序;获取tasks最小的gcs,并获取所述最小gcs的工作状态,如果工作状态为空闲,则直接向所述最小gcs分配所述h,如果总过状态为繁忙,则获取所述最小gcs正在执行的任务的完成时间,如果所述完成时间晚于所述h的开始时间,则将所述h分配到tasks第二小的gcs。
本文地址:https://www.jishuxx.com/zhuanli/20241021/320160.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表