一种串型水果多目标的单一阶段实例分割算法与双分叉枝切割点定位方法与流程
- 国知局
- 2024-10-21 15:00:38
本发明涉及一种串型水果多目标的单一阶段实例分割算法与双分叉枝切割点定位方法。
背景技术:
1、市场调查和专利检索,针对串果类,例如荔枝和葡萄等的采摘机器人在果园环境中易受采摘环境干扰,为了减少剪切过程中采摘末端误伤结果枝、果粒碰撞掉落、与结果枝碰撞导致的采摘失败。目前常用的深度学习如yolov5网络只能对串果实,果枝图像进行分类识别,既用预测方框把目标框在内,如果图像是复杂边缘,无法对边缘进行检测,如果需要用图像分割算法再次对目标的边缘进行二次分割的图像处理才能获得其复杂不规划的几何边缘图,这种方法耗时,同时因2个算法的二个阶段,还会引起计算误差。另外,串类水果结果母枝有时会有2个分叉果枝,使得切割点定位困难。
技术实现思路
1、本发明的目的所要解决的技术问题是要提供一种串型水果多目标的单一阶段实例分割算法与双分叉枝切割点定位方法,它包括:
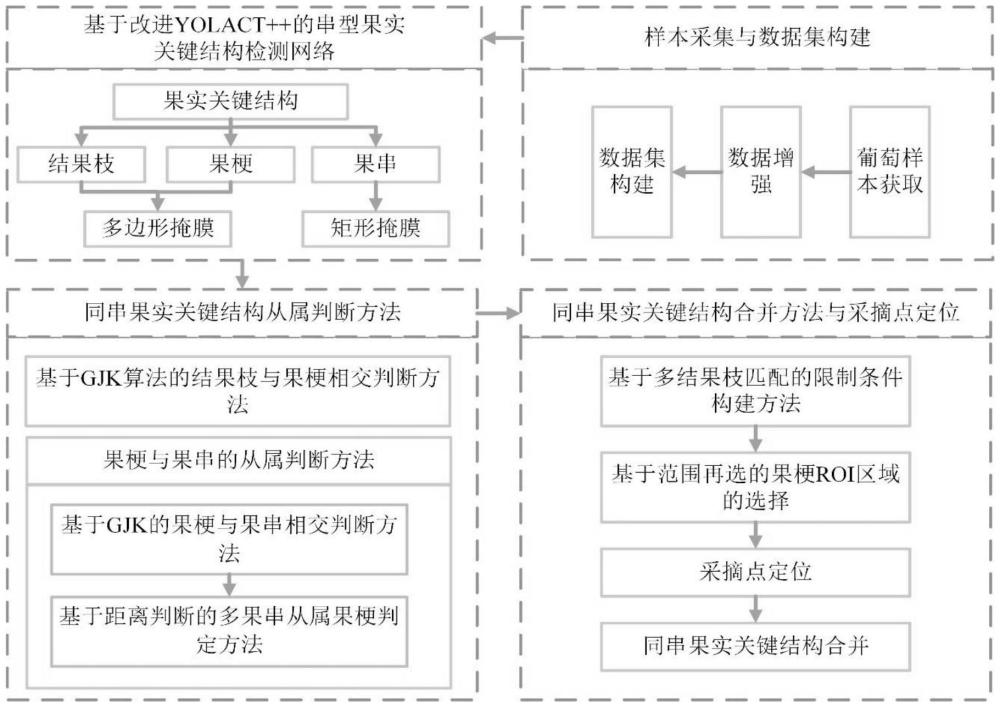
2、首先,基于串果的关键结构分析,构建基于yolact++模型改进的cg-yolact++关键结构检测网络,以实现对结果枝、果梗、果串等荔枝或葡萄关键区域的识别分割;
3、再针对视场内串果部分图像分割成多段掩膜的问题,构建了从属判断方法,实现了多邻接果串场景下的同串水果结果枝、果梗、果串的辨别与分组;
4、然后对同串水果结构进行合并,设计了基于范围再选的果梗roi区域选择方法,并对采摘点进行定位。要发明用采摘机器人夹切一体化的采摘机构,通过网络控制系统为机器人提供串果的切割点而实现自动采摘。
5、该方法通过关键结构从属判断与合并算法对单串果实样本、多串果实样本从属判断与合并,从而提高正确率。
6、本发明同背景技术相比存在的效果是:本发明方法为串果采摘机器人的优化提供了技术支持,为非结构化环境中的串类果实采摘机器人的低损收获奠定基础。采摘机器人夹切一体化的采摘机构,通过网络控制系统为机器人提供串果的切割点,实现自动采摘。
技术特征:1.一种串型水果多目标的单一阶段实例分割算法与双分叉枝切割点定位方法,其特征在于,它包括:
2.根据权利要求1所述的串型水果多目标的单一阶段实例分割算法与双分叉枝切割点定位方法,其特征在于,该方法通过关键结构从属判断与合并算法对单串果实样本、多串果实样本从属判断与合并,从而提高正确率。
技术总结一种串型水果多目标的单一阶段实例分割算法与双分叉枝切割点定位方法,它包括:首先,基于串果的关键结构分析,构建基于YOLACT++模型改进的CG‑YOLACT++关键结构检测网络,以实现对结果枝、果梗、果串等荔枝或葡萄关键区域的识别分割;再针对视场内串果部分图像分割成多段掩膜的问题,构建了从属判断方法,实现了多邻接果串场景下的同串水果结果枝、果梗、果串的辨别与分组;然后对同串水果结构进行合并,设计了基于范围再选的果梗ROI区域选择方法,并对采摘点进行定位。要发明用采摘机器人夹切一体化的采摘机构,通过网络控制系统为机器人提供串果的切割点而实现自动采摘。为串果采摘机器人的优化提供了技术支持,为非结构化环境中的串类果实采摘机器人的低损收获奠定基础。技术研发人员:邹湘军,吴烽云,周馨曌,邹天龙受保护的技术使用者:佛山市中科农业机器人与智慧农业创新研究院技术研发日:技术公布日:2024/10/17本文地址:https://www.jishuxx.com/zhuanli/20241021/320159.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表