一种低飞行时间的无人机协助边坡开挖施工方法与流程
- 国知局
- 2024-10-21 15:12:03
本发明属于边坡开挖,具体涉及一种低飞行时间的无人机协助边坡开挖施工方法。
背景技术:
1、边坡工程是岩土工程领域中最为常见的一类工程,但对于环境复杂地段边坡开挖存在几个技术难题,一是边坡定位危险繁琐,边坡定位需要人工多次放线测量,工作量大,且复杂地段常会带来诸多安全隐患;二是边坡开挖精度不足,边坡开挖时往往确定边坡坡顶线和坡脚线后,坡面凭借挖机工人经验修整,坡面平整度控制质量差;三是对于弧形坡面,定位困难,施工质量差。
2、为解决上述问题,目前本领域技术人员提出利用无人机进行协助边坡开挖施工,但是边坡开挖需要一定的时间,基于无人机的续航时间,无法做到持续的飞行协助施工,因此一种低飞行时间的无人机协助边坡开挖施工方法是本领域所急需的。
技术实现思路
1、本发明的目的是根据上述现有技术的不足之处,提供一种低飞行时间的无人机协助边坡开挖施工方法,该施工方法通过在待开挖坡面选取无人机信号区并选择测点检测获得同无人机之间的平均距离l1,通过估算土石方开挖的体积来估算边坡分区的开挖高度,当开挖高度到达开挖高度阈值区间后操控无人机飞升进行复核,对无人机信号区的测点进行检测以获得开挖过程中测点同无人机之间的平均距离l2,通过将l2-l1的差值进行比较,以提示坡面的开挖进度。
2、本发明目的实现由以下技术方案完成:
3、一种低飞行时间的无人机协助边坡开挖施工方法,其特征在于所述施工方法包括以下步骤:
4、s1:选择边坡开挖区域周边无施工扰动、平整地段,布置3-4个坐标定位点;采用人工方法,精确测量各所述坐标定位点的三维坐标;
5、s2:收集边坡坡顶线、坡脚线和平台边线坐标,通过换算,可以得到各边坡坡面点的三维坐标;在所述边坡的坡顶线上沿纵向等间隔布置若干坡顶分区标记点,在所述边坡的坡脚线上沿纵向等间隔布置若干坡脚分区标记点,将纵向上对应的所述坡顶分区标记点和所述坡脚分区标记点进行连线以实现对所述边坡在纵向上的分区,并估算各所述分区的土石方量v分区;
6、s3:将各所述坐标定位点的三维坐标以及各所述边坡坡面点的三维坐标导入至无人机的程序内;操控所述无人机起飞至边坡上空,悬停后搜集各所述坐标定位点,通过测算所述无人机与各个所述坐标定位点之间的距离,得到所述无人机的三维坐标;
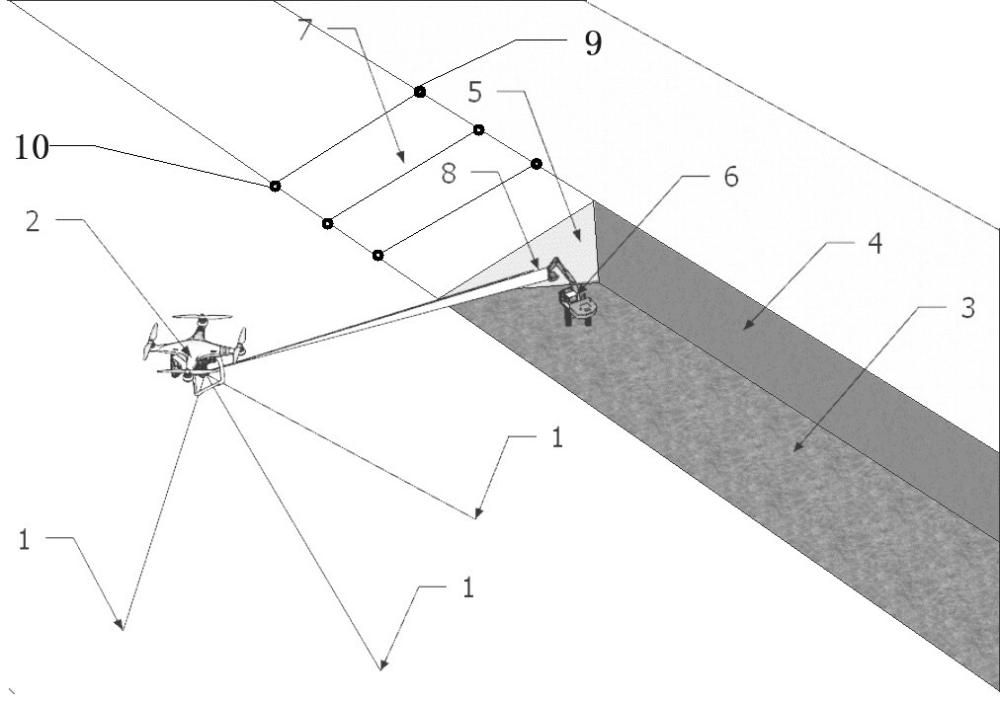
7、s4:所述无人机通过图像识别搜索方式找到待开挖坡面和挖掘机械;在所述待开挖坡面上选取无人机信号区,所述无人机信号区选择方形区域,在所述无人机信号区内均匀选取10个测点,检测各所述测点到所述无人机的距离l以及各所述测点的三维坐标,删除检测获得的距离l中的两个极大值和两个极小值,剩余6个距离l的值取平均值,得到平均距离l1;
8、s5:将所述无人机原位降落;所述挖掘机械对坡面自上而下进行开挖,基于开挖过程中土方车的运出数量估算出开挖土石方量v开挖,进而推算出对坡面的开挖高度;在开挖前预设了若干个需要所述无人机进行复核指示的开挖高度阈值区间,当所述开挖高度处于所述开挖高度阈值区间时,将所述无人机原位飞升至步骤s4中的高度,按照步骤s4中的方法对所述无人机信号区的测点到所述无人机的距离导入计算,获得所述无人机信号区内所选取各所述测点到所述无人机的平均距离l2;
9、s6:对于坡面或平台,通过将l2-l1的差值同阈值进行比较,并通过所述无人机发射不同颜色光照到所述无人机信号区,以提示所述挖掘机械的挖掘进度。
10、所述无人机信号区域选择1m*1m的方形区域。
11、步骤s6中:
12、对于坡面,若l2-l1值大于2m,则所述无人机发射绿色光到所述无人机信号区,提醒所述挖掘机械还有岩土需要开挖;若l2-l1值大于0.5m且小于2m,则所述无人机发射蓝色光到所述无人机信号区,提醒所述挖掘机械谨慎开挖;若l2-l1值大于0.1m且小于0.5m,则所述无人机发射黄色光到所述无人机信号区,提醒所述挖掘机械缓慢平整场地;若l2-l1值小于0.1m,则所述无人机发射红色光到所述无人机信号区,提醒所述挖掘机械禁止继续开挖;
13、对于平台,若l2-l1值大于2m,则所述无人机发射绿色闪烁光到所述无人机信号区,提醒所述挖掘机械该处为平台且还有岩土需要开挖;若l2-l1值大于0.5m且小于2m,则所述无人机发射蓝色闪烁光到所述无人机信号区,提醒所述挖掘机械该处为平台且谨慎开挖;若l2-l1值大于0.1m且小于0.5m,则所述无人机发射黄色闪烁光到所述无人机信号区,提醒所述挖掘机械该处为平台且缓慢平整场地;若l2-l1值小于0.1m,则所述无人机发射红色闪烁光到所述无人机信号区,提醒所述挖掘机械该处为平台且禁止继续开挖。
14、步骤s5中,基于所述挖掘机械在所述分区内自上而下的挖掘顺序,构建通过开挖土石方量v开挖和所述分区的土石方量v分区来换算开挖高度的计算公式。
15、本发明的优点是:
16、(1)采用信息化手段指导边坡开挖,单次指导范围精确到米级,可以精确控制边坡开挖深度;通过土方车的运出数量来预估开挖土石量,以实时获得开挖高度,通过这种土石方开挖量来估算开挖高度的辅助监测方式,来降低无人机飞行时间,当开挖高度到达开挖高度阈值区间时控制无人机飞升进行复核指示;
17、(2)仅需人工布置3-4个定位点,边坡开挖时不需人工放线测量,节省人力,采用无人机自动定位,测量精度高;
18、(3)可以用于人工测量不方便的复杂施工区域。
技术特征:1.一种低飞行时间的无人机协助边坡开挖施工方法,其特征在于所述施工方法包括以下步骤:
2.根据权利要求1所述的一种低飞行时间的无人机协助边坡开挖施工方法,其特征在于所述无人机信号区域选择1m*1m的方形区域。
3.根据权利要求1所述的一种低飞行时间的无人机协助边坡开挖施工方法,其特征在于步骤s6中:
4.根据权利要求1所述的一种低飞行时间的无人机协助边坡开挖施工方法,其特征在于步骤s5中,基于所述挖掘机械在所述分区内自上而下的挖掘顺序,构建通过开挖土石方量v开挖和所述分区的土石方量v分区来换算开挖高度的计算公式。
技术总结本发明公开了一种低飞行时间的无人机协助边坡开挖施工方法,该施工方法通过在待开挖坡面选取无人机信号区并选择测点检测获得同无人机之间的平均距离L1,通过估算土石方开挖的体积来估算边坡分区的开挖高度,当开挖高度到达开挖高度阈值区间后操控无人机飞升进行复核,对无人机信号区的测点进行检测以获得开挖过程中测点同无人机之间的平均距离L2,通过将L2‑L1的差值进行比较,以提示坡面的开挖进度。本发明的优点是:采用信息化手段指导边坡开挖,单次指导范围精确到米级,可以精确控制边坡开挖深度;通过土方车的运出数量来预估开挖土石量,以实时获得开挖高度来降低无人机飞行时间,当开挖高度到达开挖高度阈值区间时控制无人机飞升进行复核指示。技术研发人员:焦雷,王岩,李鹏,仲福增,刘中欣,孙丹丹,张磊,田予东,李遥,罗士伟受保护的技术使用者:中铁十五局集团有限公司技术研发日:技术公布日:2024/10/17本文地址:https://www.jishuxx.com/zhuanli/20241021/320837.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表