一种状态约束下多无人机协同载物的自适应容错控制方法
- 国知局
- 2024-11-06 14:23:23
本发明涉及无人机,尤其涉及一种状态约束下多无人机协同载物的自适应容错控制方法。
背景技术:
1、四旋翼无人机最先出现于军事活动,而后广泛实现商业化,其常见任务场景有战场侦查、航拍测绘、农业植保、电力巡检、物流配送等。多四旋翼无人机系统更是进一步拓展了其应用范围,诸如多无人机区域打击、多无人机编队表演、多无人机协同载物等。通过控制多架无人机跟踪各自期望位置和姿态,形成并保持特定静态或动态队形来实现多无人机系统协同作业目标。在上述实际应用中,四旋翼无人机往往需要通过夹持或悬挂方式携带诸如摄像头、农药水箱、包裹等装置或物品。为了克服单个四旋翼无人机有效载荷能力低、满足对负载更大质量、更多样式、更小摆动幅度或更精确运动轨迹控制的要求,例如应对空中横幅展示、森林火灾时消防物资紧急运输等任务,开展多无人机协同载物相关研究具有重要的现实意义。
2、就多无人机协同载物而言,目前大多数研究集中在带负载无人机动力学建模、多无人机协同控制、多无人机状态约束控制三个方面。首先,带负载无人机动力学建模通常选用基于牛顿-欧拉方程、拉格朗日公式的机理建模方法。然而,大部分人并未将所携带负载加入到无人机动力学模型中进行量化计算,导致所设计控制器实际性能有所下降、甚至发生飞行事故;或者需要借助拉力传感器、三维动捕系统等昂贵设备来考虑负载对无人机运动的影响,成本较高、过程复杂。其次,多无人机协同控制通常选用基于领导者-跟随者法、基于虚拟结构法和基于行为方式法。但是,很少人考虑多无人机协同载物过程中负载重量分摊问题,这与控制多架无人机跟踪期望队形是密切相关的。再者,由于诸如安全距离、飞行速度等物理限制,多无人机协同载物系统输出状态需要满足一定的约束条件。可是,现有研究中大多要求系统状态初始值就约束在其预设界限内,且所使用设计方法让控制器本身计算负担较大,诸如神经网络控制算法,其计算量和复杂度会因为神经网络节点数和层数增加而增加,不利于将其应用到实际项目中。同时,由于四旋翼无人机抗干扰能力差,还需要考虑例如不确定干扰和执行器故障等因素,这些对控制器设计及稳定性分析带来极大挑战。
3、因此,在考虑状态约束、不确定干扰和执行器故障等因素情况下,多无人机协同载物的自适应容错控制方法设计值得深入开展研究。
技术实现思路
1、本发明的目的是提供一种同时考虑状态约束、不确定干扰和执行器故障下多无人机协同载物的自适应容错控制方法,以解决如何准确建立带负载四旋翼无人机动力学模型的技术问题、解决如何设计不同负载重量分摊策略下多无人机期望编队模型的技术问题、解决状态约束、不确定干扰和执行器故障下负载运动跟踪和多架无人机队形跟踪控制的技术问题。
2、为解决上述技术问题,本发明采用如下技术方案:一种状态约束下多无人机协同载物的自适应容错控制方法,包括以下步骤:
3、s1:建立带负载四旋翼无人机动力学模型,详细过程如下:
4、a)定义地面坐标系(oe系)、机体坐标系(ob系),以及定义oe系和obi系的位置转换矩阵姿态转换矩阵rqi,分别表示为:
5、
6、其中,在oe坐标系中来定义四旋翼无人机的位置pi=[xi,yi,zi]t、速度vi=[vxi,vyi,vzi]t、姿态角qi=[φi,θi,ψi]t和姿态角速度wqi=[wφi,wθi,wψi]t,在obi坐标系中定义四旋翼无人机绕xbi、ybi、zbi轴旋转角速度wi=[wxi,wyi,wzi]t。
7、其中,s□=sin(□)表示对角度□进行正弦计算,c□=cos(□)表示对角度□进行余弦计算,□代表φi,θi或ψi。
8、b)建立带负载四旋翼无人机平移动力学模型,表示为:
9、
10、其中,表示质量矩阵,对应的系统控制增益矩阵是已知的可逆矩阵,mi是第i架无人机质量、m0是负载质量,λi表示所引入的待设计负载分配系数。
11、其中,表示第i架无人机在oe系下的控制升力,fbi是第i架无人机在ob系下的控制升力,fij分别是第i架无人机的第j个螺旋桨的转速、所产生升力,cf是螺旋桨升力系数。
12、其中,gi=[0,0,-mig]t表示第i架无人机重力,g是重力加速度;
13、其中,表示负载对第i架无人机平移运动施加的外部拉力,是负载在第i架无人机ob系下的位置,p0是负载在oe坐标系中的位置,p0可通过任意三架无人机位置建立方程组得到。表示第i架无人机位置由机体坐标系到地面坐标系的转换矩阵,wi表示第i架无人机旋转运动角速度,第i架无人机旋转运动角加速度,pi表示第i架无人机位置坐标,分别表示负载在第i架无人机机体坐标系下位置的一阶导、二阶导,g0分别表示负载重量。
14、c)建立带负载四旋翼无人机旋转动力学模型,表示为:
15、
16、其中,表示转动惯量矩阵,对应的系统控制增益矩阵也是已知的可逆矩阵,jxi、jyi、jzi是第i架绕无人机机体坐标系x轴,y轴和z轴旋转的转动惯量,△i1=-λim0hzb0i>0、△i2=λim0hxb0i、△i3=-λim0hyb0i;△i1、△i2、△i3均表示无人机旋转运动与转动惯量相关的耦合项,h表示无人机形心和悬挂点间的距离,xb0i、yb0i、zb0i分别表示负载在第i架无人机机体坐标系下位置的三个分量。
17、其中,mui=[muφi,muθi,muψi]t表示第i架无人机的控制力矩,muφi=(fi1-fi3)l是俯仰力矩、muθi=(fi2-fi4)l是滚转力矩、是偏航力矩,l表示四旋翼无人机的机臂长度,cm是螺旋桨电机的反扭矩系数;
18、其中,表示非线性项,有b12=-λim0h(xb0iwxi+zb0iwzi)-jziwzi,,b21=λim0h(yb0iwyi+zb0iwzi)+jziwzi,,b31=-jyiwyi,b32=jxiwxi,b33=0;
19、其中,表示负载对第i架无人机旋转运动施加的外部拉力力矩,g0=[0,0,-m0g]t是负载重力。
20、jzi、jyi、jzi分别表示第i架无人机绕机体坐标系与x轴、y轴、z轴旋转运动相关的转动惯量。
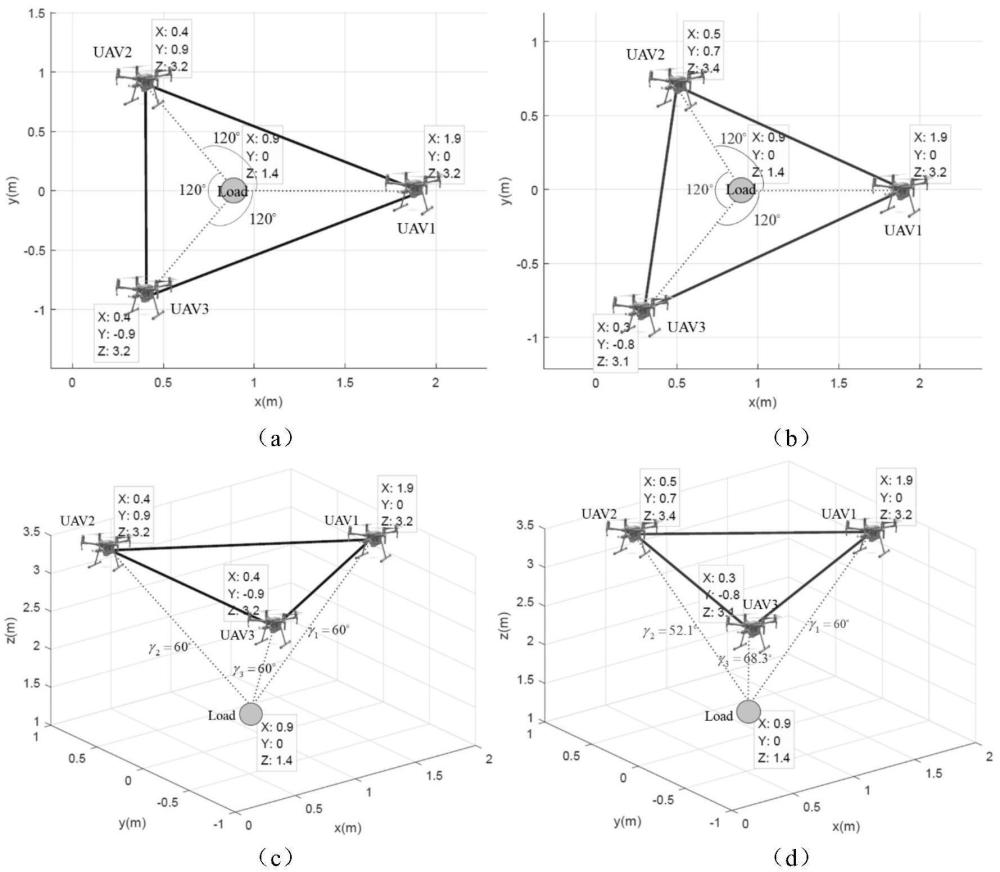
21、s2:设计多无人机期望编队模型,表示为:
22、
23、其中,表示人为给定的负载期望运动轨迹,pbhi=[0,0,-h]t表示负载悬挂点在obi坐标系下的实际位置,h>0,是负载悬挂点在oe坐标系下的实际位置;
24、其中,表示每架跟随无人机负载分配角,i={2,3,...,n},γi取值范围是0到90°,γ1是人为指定的领航无人机期望负载分配角,λi/λ1是第i架跟随机负载分配系数λi与领航机负载分配系数λ1的相对大小;
25、其中,ri=lcos(γi)表示无人机上绳索在xeoeye平面上的投影线段长度;
26、其中,υ=2π/n表示第i架和第i+1架无人机上缆绳在xeoeye平面上投影线的夹角;
27、其中,rli=[-ai,-bi,-hi]t表示在oe系下第i架无人机悬挂点指向负载的缆绳向量,ai=ricos(-(i-1)υ)、bi=risin(-(i-1)υ),hi=lsin(γi)。ai=ricos(-(i-1)υ)、bi=risin(-(i-1)υ),hi=lsin(γi)。ai,bi分别表示第i架无人机上绳索在xeoeye平面上的投影线段的x轴分量、y轴分量,hi表示第i架无人机上绳索线段在地面坐标系z轴分量。
28、s3:设置状态约束下多无人机协同载物系统的一致性态同步误差,详细过程如下:
29、首先定义第i架无人机位置和速度跟踪误差为以及姿态和角速度跟踪误差为t表示单个平移运动通道,t=x,y,z,r表示单个旋转运动通道,r=φ,θ,ψ;
30、接着引入如下非线性变换得到状态约束下无人机状态跟踪误差,对应表示为
31、
32、其中,ξpti,ξvti,ηqri和ηwri分别表示经过非线性变换得到状态约束下无人机位置、速度、姿态角、姿态角速度跟踪误差。
33、fpti、fvti、fqti、fwti分别是待设计的位置、速度、姿态、角速度的误差约束边界值,规定为大于零的常数;公式(6)-(9)的约束条件下无人机状态跟踪误差ξpti在开区间上是连续可微且有定义的,当epti趋近于区间的边界时,ξpti则趋近于正负无穷。
34、同理可以将经过非线性变换后的无人机状态跟踪误差ξvti、ηqri、ηwri约束条件分别写为开区间
35、并对公式(6)-(9)两边分别求一阶导,得到:
36、
37、其中,系数在开区间内有定义,且是已知可计算的正常值,同样有系数
38、再引入中间过渡误差变量和是待设计的正常值参数;
39、而后定义第i架无人机与其多个邻居无人机的平移和旋转运动子系统的一致性状态同步误差分别为:
40、
41、其中,aij>0表示第i架无人机能获得第j架无人机的信息,否则aij=0;
42、接着引入中间过渡误差变量则存在关系式
43、最后得到n架无人机平移子系统t通道和旋转子系统r通道的一致性状态同步误差动力学模型,分别表示为:
44、
45、其中,μpt=diag{μpt1,…,μptn}∈rn×n、μvt=diag{μvt1,…,μvtn}∈rn×n、μqr=diag{μqr1,…,μqrn}∈rn×n、μwr=diag{μwr1,…,μwrn}∈rn×n分别表示关于公式(10)系数μpti、关于公式(11)系数μvti、关于公式(12)系数μqri、关于公式(13)系数μwri的n行1列的向量。
46、其中,vt、vt*分别是无人机的实际速度和期望速度;wt、wt*分别是无人机的实际角速度和期望角速度;
47、其中,ρt和ρr分别是无人机平移和旋转子系统的执行器输出效率函数;
48、其中,lt和lr分别表示无人机平移和旋转子系统的集总不确定项;
49、其中,和分别表示无人机平移子系统质量矩阵、无人机旋转子系统转动惯量矩阵;
50、其中,和分别表示无人机平移和旋转子系统的待设计的正常值参数矩阵;
51、其中,ft和mr分别表示在地面坐标系下无人机平移子系统的控制输入、在机体坐标系下无人机旋转子系统的控制输入;
52、其中,gt和ωr分别表示无人机重力、无人机角速度相关的非线性项。
53、s4:设计状态约束、不确定干扰和执行器故障下多无人机协同载物平移子系统和旋转子系统的自适应容错控制器,并实现负载的平稳运输,详细过程如下:
54、第一步,第一步,考虑公式(16)定义的多无人机协同载物平移子系统,设计对应自适应容错平移控制器,并实现多架无人机一致性位置同步误差eti、每架无人机位置跟踪误差epti趋近于零或收敛于一个原点附近的紧集内,具体如下:
55、选择李雅普诺夫函数,表示为:
56、
57、其中,是一个与拉普拉斯矩阵∏相关的(n×n)维矩阵,是的逆矩阵,是一个正定对角阵;un是满足等式的正交矩阵,λi表示n架无人机的无向网络连通图的拉普拉斯矩阵的第i个特征值。
58、其中,σt=diag{σt1,…,σtn}∈rn×n是关于待设计正常值参数σti的正定对角矩阵,是σt的逆矩阵,即也是正定对角矩阵;表示虚拟参数cti的估计误差,是虚拟参数cti的估计变量。σti、ρti分别表示第i架无人机平移子系统t通道的待设计正常值参数、虚拟参数cti的估计误差、执行器效率值。
59、设计状态约束下平移子系统控制器,表示为:
60、
61、其中,kti>0∈r1×1是待设计的正常值参数,μvti>0∈r1×1是已知可计算的正常值参数,cti是所引入的非负未知的虚拟参数,ζti(·)是所设计的非负已知可计算的标量核心函数,t>0是一个趋近于零的正常数。分别表示第i架无人机平移子系统t通道的待设计正常值参数、集总不确定项界限值。
62、同时,采用自适应更新律如下:
63、
64、其中,σti>0∈r1×1、εti>0∈r1×1是待设计的正常值参数。
65、第二步,考虑公式(13)定义的多无人机协同载物旋转子系统,设计对应自适应容错旋转控制器,并实现多架无人机一致性姿态同步误差eri和每架无人机姿态跟踪误差eqri趋近于零或收敛于一个原点附近的紧集内,具体如下:
66、选择李雅普诺夫函数,表示为:
67、
68、其中,rn选择同上一步;σr=diag{σr1,…,σrn}∈rn×n是关于待设计正常值参数σri的正定对角矩阵,是σr的逆矩阵,即也是正定对角矩阵;表示虚拟参数cri的估计误差,是虚拟参数cri的估计变量。
69、其中,σri、ρri分别表示第i架无人机旋转子系统r通道的待设计正常值参数、虚拟参数cri的估计误差、执行器效率值。
70、设计状态约束下旋转子系统控制器,表示为:
71、
72、其中,kri>0∈r1×1是待设计的常值参数,μwri>0∈r1×1是已知可计算的正常值参数,cri是所引入的非负未知的虚拟参数,ζri(·)是所设计的非负已知可计算的标量核心函数,t>0是一个趋近于零的正常数。分别表示第i架无人机旋转子系统r通道的待设计正常值参数、集总不确定项界限值。
73、同时,采用自适应更新律如下:
74、
75、其中,σri>0∈r1×1、εri>0∈r1×1是待设计的常值参数。
76、与现有技术相比,本发明至少具有如下有益效果:
77、1.本发明状态约束下多无人机协同载物的自适应容错控制方法,以带负载的多四旋翼无人机系统为研究对象,针对如何量化负载对无人机运动影响的问题,建立了一种带负载多四旋翼无人机系统动力学模型。先通过计算负载施加在每架无人机平移运动上额外拉力、旋转运动上额外拉力力矩,建立了带负载无人机动力学模型,避免因未考虑负载导致的建模误差过大及控制器失效。接着结合多智能体图论知识,建立了一种带负载多人机一致性状态误差动力学模型,基于此开展控制器设计。
78、2.本发明状态约束下多无人机协同载物的自适应容错控制方法,针对如何考虑负载重量分摊的多无人机协同控制问题,提出了一种具有显示表达式的多机期望编队模型。先定义了一种负载分配系数,再结合领导者-跟随者协同编队策略,设计了一种考虑负载分摊问题的多无人机期望编队模型,可以根据不同无人机有效载荷能力差异更加合理地构建多机编队飞行队形,从而满足实际应用中多机协同分摊负载的任务需求。
79、3.本发明状态约束下多无人机协同载物的自适应容错控制方法,针对状态约束下考虑不确定干扰和执行器故障的多无人机协同载物问题,提出了一种多机自适应容错控制算法。首先利用了一种虚拟参数估计和标量函数提取技术,并设计了该参数的自适应更新律,减轻了控制算法的计算负担。接着利用了一种非线性变换函数处理无人机状态约束,大大降低了控制算法稳定性分析的复杂度。最后选择合适的李雅普诺夫函数,证明了基于鲁棒自适应所设计多机容错控制器稳定性以及系统所有信号有界性,实现了负载的平稳运输。
本文地址:https://www.jishuxx.com/zhuanli/20241106/321751.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表