一种基于令牌选择Transformer的流场预测方法
- 国知局
- 2024-07-31 22:46:05
本发明属于计算流体力学领域和人工智能,具体涉及一种基于令牌选择transformer的流场预测方法。
背景技术:
1、流场预测是对流体的运动状态进行预测和模拟的过程,在化工、气候和空气动力学等领域有着广泛的应用,以空气动力学领域为例,获得飞行器翼型附近的流场数据是飞行器设计和优化过程中至关重要的环节。最初,获取翼型流场数据的主要手段是借助风洞试验,这种方法虽然结果较为准确,但实验设计需要依靠大量的先验知识,且实验周期较长,搭建风洞设备所需要的资源开销较大,因此多用于飞行器设计的后期;随着高性能计算和数值模拟方法的兴起,计算流体力学(cfd)方法逐渐成为模拟翼型附近流场的主要手段。cfd方法主要通过离散化连续的流体方程,如纳维-斯托克斯(navier-stokes)方程,通过数值方式近似求解这些方程从而得到流场数据。然而在复杂条件下的cfd求解需要大量的迭代过程,对cpu和内存的要求也很高。
2、近年来,随着人工智能和神经网络的广泛应用,基于深度学习和数据驱动的方法成为获取流场数据的新手段。这种方法只需要在前期花费一定的时间训练网络模型,之后便可以使用训练好的模型在几秒内完成不同翼型的流场预测。但是目前现有的深度学习流场预测方法也存在一些局限性:许多基于cnn的流场预测方法将流场数据投影至均匀分布的笛卡尔网格中,这种像素化的方法会造成大量的流场细节缺失,特别是在靠近翼型表面的位置;并且现有的翼型几何参数的获取方法也无法准确地捕捉到翼型中最有效的几何特征。因此,如何更准确地提取翼型特征和预测流场细节是基于深度学习的流场预测方法需要优化的方向。
技术实现思路
1、针对现有技术存在的不足,本发明提出了一种基于令牌选择transformer的流场预测方法,能够提取到更加准确和有效的翼型特征,并且能够提升流场预测精度,特别是在靠近翼型表面的位置。
2、为了解决上述技术问题,本发明通过以下方式来实现:
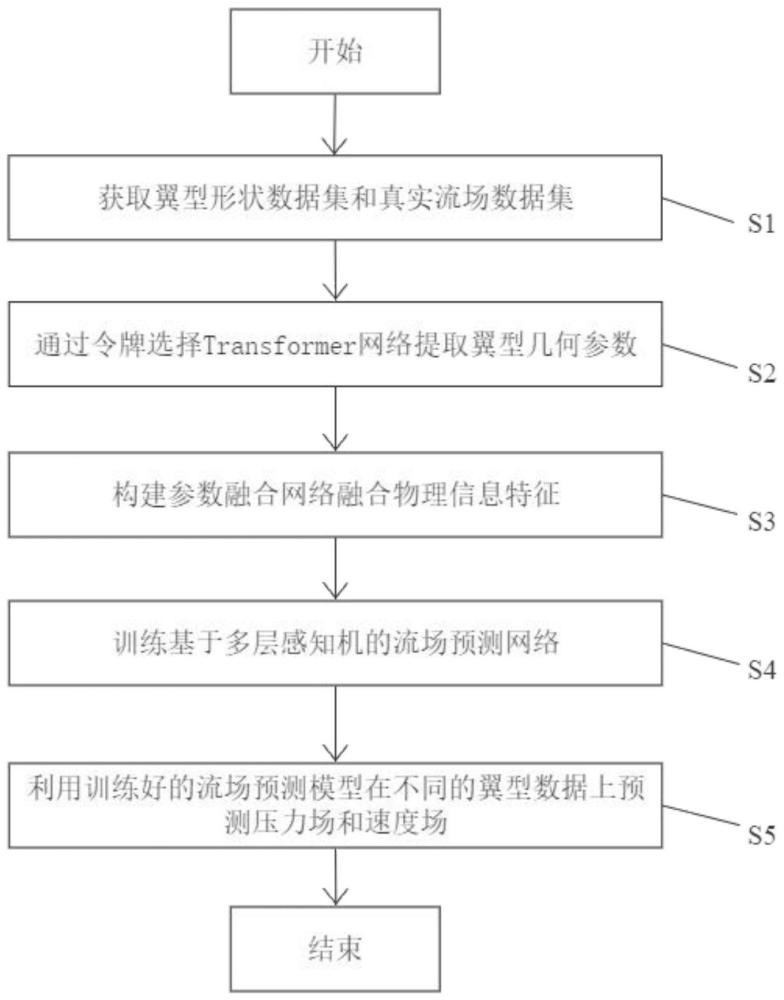
3、一种基于令牌选择transformer的流场预测方法,包括以下步骤:
4、s1、获取翼型形状数据集和真实流场数据集;
5、s2、通过令牌选择transformer网络提取翼型几何参数;
6、s3、构建参数融合网络融合物理信息特征;
7、s4、训练基于多层感知机的流场预测网络;
8、s5、利用训练好的流场预测模型在不同翼型数据上预测压力场和速度场。
9、进一步地,所述步骤s1具体包括以下步骤:
10、s11、从uiuc翼型数据库中选取基准翼型,通过非均匀有理b样条插值方法进行翼型拟合,并在翼型拟合曲线上选取控制点作为当前翼型新的x坐标和y坐标;
11、s12、对步骤s11中所有翼型新坐标进行最大最小归一化处理,其表达式如下:
12、
13、其中,xi、yi表示当前翼型的坐标,xmin、ymin为全局最小值,xmax、ymax为全局最大值,xj、yi为归一化后的坐标;
14、s13、根据归一化后的坐标生成翼型形状灰度图,处于翼型几何曲线上的像素点值为1,不处于翼型几何曲线上的像素值为0,其他位置的像素值介于范围[0,1],得到翼型形状数据集;
15、s14、划分计算网格,对翼型数据集中的翼型样本进行cfd求解,得到不同翼型样本在不同流动条件下的真实数据,形成真实流场数据集。
16、进一步地,所述步骤s2具体包含以下步骤:
17、s21、将步骤s1中获取的翼型形状数据集中的翼型图像进行序列化,对每张翼型图像pici进行块划分和展平,将其转换为一系列的二维令牌(token)pi,pici和pi的表达式如下:
18、
19、其中,表示实数集,h、w和c分别表示翼型图像的宽、高和通道数目,p表示选取划分块的宽和高,n=h*w/p2表示划分出的二维令牌数量;
20、s22、在获取的token序列中增加一个可学习的嵌入clstoken,维度和其他token维度保持一致,进而得到每一张翼型图像的完整token序列表示i,其具体表达式如下:
21、
22、其中,pcls表示clstoken,p0,p1,...pn-1表示上述中获取的n个token,d=p2*c表示token的维度;
23、s23、将i通过多层感知机网络进行降维,使每一个token的维度从d降至得到i′,其具体表达式如下:
24、
25、s24、步骤s23中的p′cls作为全局特征,p′0,p′1,....p′n-1作为局部特征,将全局特征p′cls与每一个局部特征p′i进行拼接,进而得到拼接特征其表达式如下:
26、
27、s25、将步骤s24中得到的n+1个拼接特征记为再将其输入到另一个后接归一化层的多层感知机网络,计算特征的重要性分数向量s,其表达式如下:
28、
29、其中,mlp()表示多层感知机网络的函数,softmax()表示归一化指数函数,将mlp的输出转化为[0,1]间的概率值;
30、s26、使用重要性分数向量s筛选出所有n+1个token中重要性排在前k位的token索引m,其表达式如下:
31、m∈{0,1}(n+1)*k
32、其中,m中的每个元素都是一个one-hot指示器,取值从集合{0,1}中选取;
33、s27、使用步骤s26中矩阵m的转置与i进行矩阵乘法,得到给定翼型的最重要的k个翼型参数特征
34、
35、进一步地,所述步骤s3具体包含以下步骤:
36、s31、对于每个网格点坐标,计算其到翼型几何曲线的最短距离d,其表达式如下:
37、
38、其中,(x,y)表示网格点的x轴坐标和y轴坐标,表示翼型几何曲线上点的x轴坐标和y轴坐标;
39、s32、构建参数融合网络,将每个网格点的横纵坐标、坐标到翼型几何边界的最短距离及归一化后的雷诺系数与攻角输入到一个多层感知机网络进行特征融合与升维,最终得到物理信息特征pphy,其表达式如下:
40、
41、其中,和分别表示归一化后的雷诺系数和攻角,d表示融合得到的物理信息特征的维度,与步骤s2中提取的每一个翼型特征维度保持一致。
42、进一步地,所述步骤s4具体包含以下步骤:
43、s41、将重要性排名前k的翼型参数特征与物理信息特征pphy作为基于多层感知机的流场预测网络的输入,流场预测网络的输出为对应网格点坐标的流场数据,其表达式如下:
44、
45、其中,fpredict()表示流场预测网络的函数,和分别表示x方向速度分量、y方向速度分量和压力的预测值;
46、s42、对于流场预测网络,设计损失函数lossmlp表达式如下:
47、
48、其中,n表示样本总数,ui,vi,pi表示x方向速度分量,y方向速度分量和压力的真实值;
49、s43、在gpu服务器上训练模型,设置不同的模型参数和迭代步数进行多轮训练,选择在测试数据上预测误差最小的模型作为最终的流场预测模型。
50、进一步地,所述步骤s5具体方法如下:
51、使用训练好的上述流场预测模型,输入不同翼型特征与雷诺数、攻角信息,输出对应翼型和流动条件下翼型附近的压力场和速度场;使用处理软件进行流场数据可视化处理,以便进行翼型优化、气动性能分析、气动噪声预测等后续工作。
52、与现有技术相比,本发明具有的有益效果:
53、借助transformer的自注意力机制,并通过令牌(token)选择模块,更加准确地筛选翼型特征,同时在一定程度上避免了参数冗余;为不同翼型形状提取归一化的坐标值并生成标准化图像,便于后续神经网络进行处理,将流场网格位置信息和流场参数物理信息使用神经网络进行特征融合,并与翼型参数特征保持对齐,能够在一定程度上增强模型的表达能力和泛化能力;相比现有的深度学习流场预测方法,本发明提高了流场预测的精度,特别是靠近翼型结构表面的位置。
本文地址:https://www.jishuxx.com/zhuanli/20240730/194496.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。