一种基于点云技术的汽车零件识别方法及系统
- 国知局
- 2024-07-31 22:46:00
本发明涉及汽车零件识别,具体为一种基于点云技术的汽车零件识别方法及系统。
背景技术:
1、随着汽车工业的飞速发展,汽车零件的种类和复杂度不断增加,这对汽车零件的识别提出了更高的要求。传统的零件识别方法主要依赖于人工识别或二维图像处理技术,这些方法在处理复杂或相似零件时容易出错,难以满足现代汽车制造业的高效率和高精度要求。而三维点云技术因其能够提供零件的全方位立体数据而逐渐受到重视。点云技术可以捕捉到零件的精确三维几何形状,为零件的自动识别和分类提供了新的解决方案。
2、然而,点云数据通常包含大量的噪声和冗余信息,且数据量庞大,直接处理和分析点云数据的计算成本非常高。此外,点云数据的特征提取和识别准确性直接影响到最终识别结果的可靠性。因此,如何高效准确地从点云数据中提取有用特征,成为了点云技术在汽车零件识别应用中亟需解决的技术问题。
技术实现思路
1、鉴于上述存在的问题,提出了本发明。
2、因此,本发明解决的技术问题是:点云数据直接处理的计算成本高、精度低,现有技术不能高效从点云数据中提取有用特征。
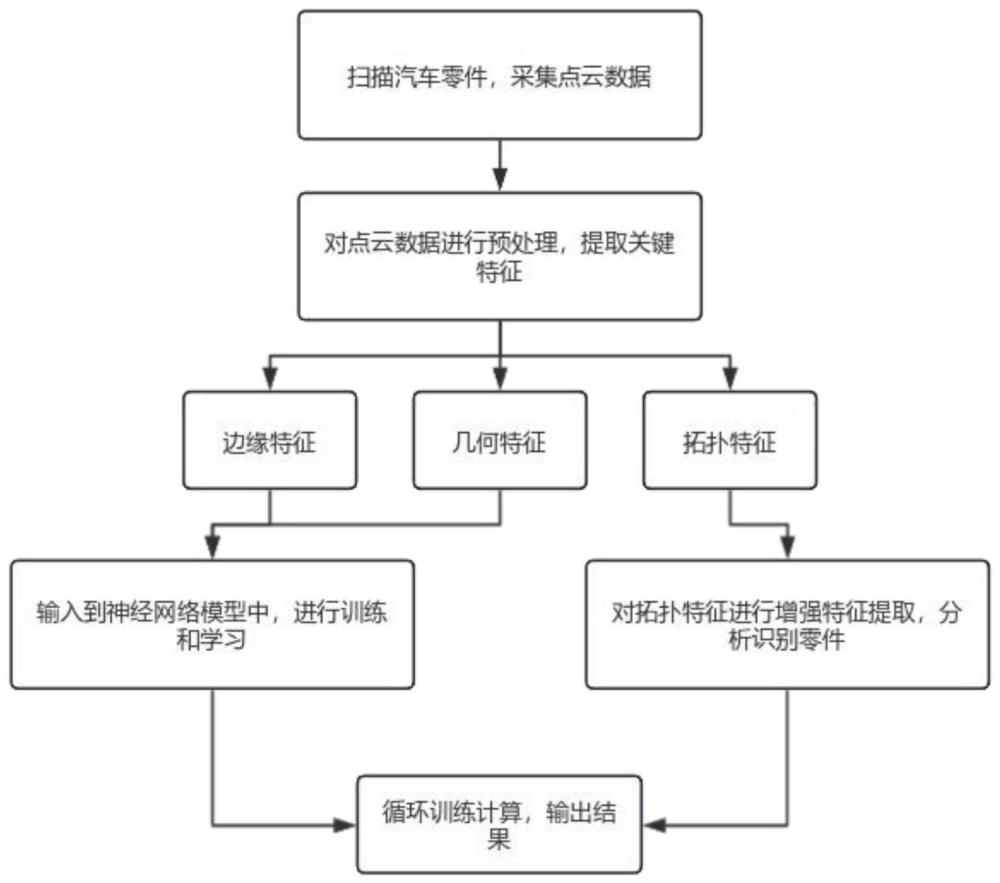
3、为解决上述技术问题,本发明提供如下技术方案:一种基于点云技术的汽车零件识别方法,包括:扫描汽车零件,采集点云数据。
4、对点云数据进行预处理,提取边缘特征、几何特征和拓扑特征。
5、将边缘特征和几何特征输入到神经网络模型中,进行训练和学习。
6、对拓扑特征进行增强特征提取,分析识别零件。
7、作为本发明所述的基于点云技术的汽车零件识别方法的一种优选方案,其中:所述扫描汽车零件,采集点云数据包括,采用高精度激光扫描设备捕捉汽车零件的细微结构和几何形状,对汽车零件从不同角度进行扫描,获得点云密度图。
8、根据点云密度图计算点云密度,表示为:
9、
10、其中,n表示点云密度图中的点的个数,v表示零件体积。
11、将点云密度阈值设定为每立方毫米100点,将低于阈值的点云密度数据重新扫描并计算,若重新计算得到的点云密度仍然低于阈值,则丢弃点云数据。
12、作为本发明所述的基于点云技术的汽车零件识别方法的一种优选方案,其中:所述对点云数据进行预处理包括,对保留下来的点云数据进行去噪处理,识别并移除异常点,减少背景噪声对数据质量的影响,对点云数据进行压缩,最后进行滤波处理,提高点云数据的均匀性和质量。
13、去噪公式表示为:
14、
15、其中,λi表示基于统计分析确定的噪声点权重,f(xi,σ2)表示高斯分布函数,xi表示某个点云,σ2表示方差,控制分布的宽度。
16、压缩公式表示为:
17、
18、其中,n’表示去噪后点云总数,o(x’i,y’i,z’i)表示八叉树编码函数。
19、最后进行滤波处理,表示为:
20、f(c(d′))=c(d′)*g(μ,σ2)
21、其中,g(μ,σ2)表示高斯滤波器,u表示均值,代表滤波器的中心位置。σ2表示方差,控制滤波器的宽度。
22、作为本发明所述的基于点云技术的汽车零件识别方法的一种优选方案,其中:所述提取边缘特征、几何特征和拓扑特征包括,结合曲面密度、零件表面积、光照和颜色信息,对点云数据进行边缘特征提取:
23、
24、其中,β表示调节参数,pi表示点i在点云数据中的曲面密度,表示点i在点云数据中的梯度,γ表示调节参数,λ表示调节参数,表示点云数据的拉普拉斯算子,δ表示调节参数,v表示,∈表示调节参数,li表示点i的光照强度,η表示调节参数,ci表示点i的颜色强度,κ表示调节参数。
25、考虑曲率、温度、速度和角度的多维度信息,进行几何特征提取:
26、
27、其中,θ表示调节参数,ki表示点i的曲率,ω表示调节参数,μ表示平均梯度向量,用于标准化局部梯度的计算。ζ表示调节参数,ti表示点i的温度值,σ表示调节参数,vi表示点i的速度,φi表示点i相对于参考方向的角度。
28、根据质量、亮度和相对位置参数,进行拓扑特征提取:
29、
30、其中,ξ表示调节参数,mi表示点i的质量,φ表示调节参数,τi表示点i的拓扑距离,表示调节参数,bi表示点i的亮度值,ψ表示调节参数,λ’表示调节参数,ri表示点i在特定参考系统中的相对位置。
31、作为本发明所述的基于点云技术的汽车零件识别方法的一种优选方案,其中:所述将边缘特征和几何特征输入到神经网络模型中包括,将所述边缘特征和所述几何特征输入至卷积神经网络模型进行训练,所述神经网络模型结构包括输入层、卷积层conv1、池化层pool1、卷积层conv2、池化层pool2、全连接层和输出层,具体训练过程如下:
32、在输入层输入所述边缘特征和所述几何特征,进行归一化处理。
33、在卷积层conv1中应用卷积滤波器提取低级特征,表示为:
34、c1(x)=relu(w1*x+·b1)
35、其中,w1表示conv1的卷积核权重,b1表示conv1的偏置,x表示输入该层的数据,relu表示激活函数。
36、在池化层pool1中进行池化操作,减少维度,保留重要信息。
37、在卷积层conv2中提取更高级的特征,表示为:
38、c2(x)=relu(w2*p1(x)+b2)
39、其中,w2表示conv2的卷积核权重,b2表示conv2的偏置,p1(x)表示池化层pool1的输出。
40、在池化层pool2进一步降维。
41、在全连接层将特征映射到输出类别,表示为:
42、f(x)=wf·p2(x)+bf
43、其中,wf表示全连接层的权重,p2(x)表示池化层pool2的输出,bf表示全连接层的偏置。
44、输出层使用softmax函数将全连接层的输出转化为每个汽车零件的概率分布,表示为:
45、
46、使用交叉熵损失函数计算模型的损失值,根据损失值通过梯度下降更新网络中的权重和偏置。
47、重复上述过程,直到训练轮数达到设定阈值时,输出结果。
48、作为本发明所述的基于点云技术的汽车零件识别方法的一种优选方案,其中:所述对拓扑特征进行增强特征提取包括,为了处理拓扑特征并根据拓扑特征识别出具体的汽车零件,设计基于图论和拓扑学的计算方法,综合考虑汽车零件的拓扑连接性、空间关系以及其他相关的物理属性。
49、将拓扑特征tt(d’,m,b)转换为向量形式,考虑拓扑距离、连通性和其他拓扑属性,对拓扑特征进行增强特征提取:
50、
51、其中,αi表示原始拓扑特征调节参数,β′表示调节参数,rj表示零件之间的关系度量,m表示构建拓扑关系网络时零件间关系的度量数量,γ表示调节参数,lj表示零件间的连线长度,δ表示调节参数,o表示考虑的子图的数量,ck表示零件的复杂性。
52、基于增强的拓扑特征构建图模型,节点代表零件,边代表零件间的拓扑关系。
53、对所述图模型进行分析,识别零件:
54、
55、其中,ωi表示权重参数,dij表示第i个和第j个零件间的距离,μd表示距离度量和特性ck的平均值,σd表示距离度量和特性ck的标准差,k表示距离度量特性拓扑数量,γk表示权重参数,δc表示距离度量和特性ck的预期值。
56、作为本发明所述的基于点云技术的汽车零件识别方法的一种优选方案,其中:所述分析识别零件包括,将拓扑特征数据代入计算公式,得出分析结果,判断结果是否正确,若整体判断准确率低于85%,则使用贝叶斯优化方法对公式进行参数调整,直到准确率达到85%。
57、若参数优化后准确率仍然低于85%,则重新引入其他拓扑特性,进行拓扑特征增强提取,再代入计算公式进行计算。
58、一种基于点云技术的汽车零件识别系统,其特征在于:包括,
59、采集数据模块,扫描汽车零件,采集点云数据。
60、提取特征模块,对点云数据进行预处理,提取边缘特征、几何特征和拓扑特征。
61、神经网络模型训练模块,将边缘特征和几何特征输入到神经网络模型中,进行训练和学习。
62、拓扑特征处理模块,对拓扑特征进行增强特征提取,分析识别零件。
63、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现如上所述的方法的步骤。
64、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的方法的步骤。
65、本发明的有益效果:本发明能够快速、准确地识别各种汽车零件。通过对点云数据的预处理和特征提取,能够充分挖掘零件的边缘、几何和拓扑特性,为后续的识别和分类提供丰富的信息。与传统的物理测量或二维图像识别方法相比,本发明不受复杂零件形状和相似零件间微小差异的影响,识别精度高,且对环境适应性强。通过对拓扑特征的增强特征提取和神经网络的深度学习,本发明显著提高了识别的准确率和效率。特别是在零件形状复杂或彼此相似度较高的情况下,本发明能够准确区分和正确识别,极大地减少了误识别的可能性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/194484.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。