一种扰动环境下水下机器人动力定位控制器的建立方法
- 国知局
- 2024-07-31 23:50:01
本发明涉及缆控水下机器人在扰动环境下高精度动力定位控制技术,特别涉及一种扰动环境下水下机器人动力定位控制器的建立方法,融合了水下机器人参数识别的非稳态数值模拟方法建立水下机器人模型,观测机器人已知参数项的水动力,以及基于扩张观测器的水下机器人高精度动力定位控制方法。
背景技术:
1、缆控水下机器人在桥梁桩基、水坝、船体等水下结构物检测中应用越来越广泛。尽管市场上已有一些成型的缆控水下机器人,但它们通常只有最基础的定深和定航向控制。在水下结构物检测中,经常使用声纳和摄像机。这些传感器通常只在稳定的位姿下才能获得良好的成像效果。本发明的动力定位控制意味着控制缆控水下机器人在水平面保持相同的位姿,即在设置设定值后,控制水下机器人的水平推进器推力输出,保持其水平位置和航向角不变。然而,水平面上常有扰流、作业机械臂等带来的巨大扰动,对动力定位控制器提出严峻的考验。现有报道的机器人对横向扰动力的抵抗能力较弱,为满足稳定性和快速控制的需求,动力定位控制器还大都采用比例微分(pd)控制,虽能确保控制器的稳定性,但控制精度差强人意。。
2、需要说明的是,在上述背景技术部分公开的信息仅用于加强对本发明的背景的理解,因此可以包括不构成本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本发明的目的是为了解决背景技术存在的技术问题,为此,首先针对水下机器人横向推力不足的问题,设置水平侧向推进器保障横向推力;基于数值模拟方法辨识水下机器人水动力参数作为参数已知项,观测所需水动力,基于扩张观测器观测未知水动力和扰动力,在控制器中补偿观测的已知及未知水动力。从而,设计一种扰动环境下水下机器人动力定位控制器的建立方法,提高动力定位精度,并基于李雅普诺夫函数验证算法的稳定性。
2、为了实现上述目的,本发明所采用的技术方案如下:
3、一种扰动环境下水下机器人动力定位控制器的建立方法,包括以下步骤:
4、s1:利用数值模拟方法识别水下机器人的水动力参数;
5、首先,通过solidworks软件获取水下机器人的质量m和转动惯量izz,在star-ccm+软件中,使用dfbi开展数值模拟,获得水下机器人在附加外力和水流产生的水动力的合力下的运动状态;获得水下机器人在合力矩或合力下的速度、加速度、位姿状态后,可建立力-速度和加速度相关性方程组,通过最小二乘法获取惯性参数ma、ca(v)和阻力性参数d(v);
6、s2:建立已知水动力和总扰动力的线性扩张观测器,如下:
7、
8、
9、其中,和分别为水下机器人在惯性坐标系下的位置、速度和总扰动力,为已知参数矩阵,e3*3为三阶单位矩阵,03*3为三阶零矩阵,y包含水下机器人惯性坐标系下的位置和航向角,jh为惯性坐标和体坐标的转换矩阵,mrb为刚性质量和惯量矩阵,th为水平面动力学参数已知项下水下机器人所需的推力和力矩,wo为观测器带宽;
10、s3:建立水下机器人动力定位控制器;
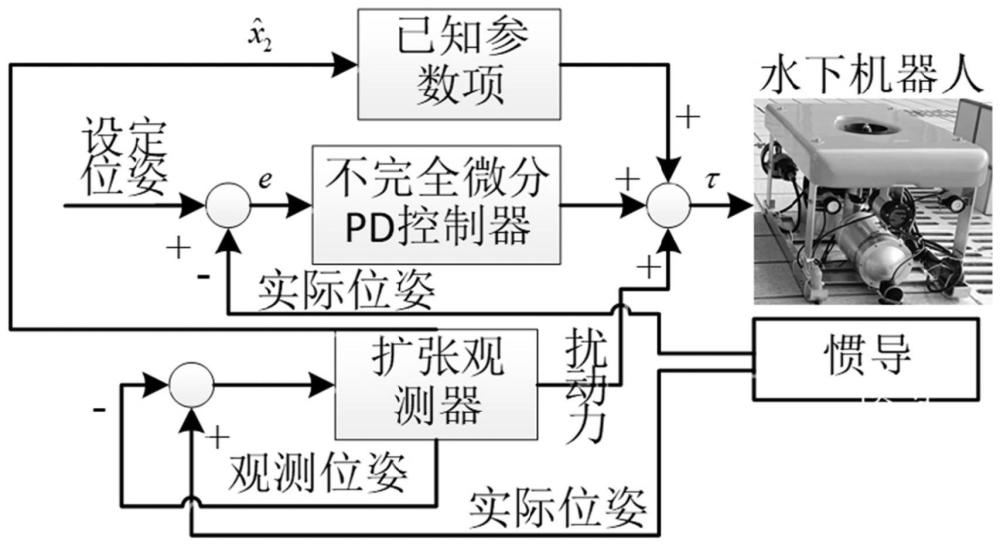
11、基于水下机器人在惯性坐标系下的位置速度和总扰动力设计动力定位控制器,控制器的输出是观测的扰动力、已知参数项水动力和不完全微分的pd控制器输出之和,如下:
12、
13、ud(k)=αud(k-1)+(1-α)kd[eh(k)-eh(k-1)]
14、其中,kp是比例增益,kd是微分增益,eh=[x-xd y-yd ψ-ψd]为实际值与设定值的偏差向量。
15、以下为本发明进一步限定的技术方案,力-速度和加速度相关性方程组,如下:
16、
17、其中,thn为对水下机器人设置的力矩,vn为数值计算获得的加速度和速度响应。
18、以下为本发明进一步限定的技术方案,通过水动力数值模拟计算获得的参数ma、d(v)和ca(v)称为水动力参数的已知项,在此,ma为附加质量矩阵、d(v)为线性及非线性阻力矩阵、ca(v)为附加质量产生的科氏力和离心力矩阵;参数辨识的误差称为惯性、科氏力和阻力三类水动力参数的未知项;
19、建立水下机器人水平面在已知动力学参数项下的动力学模型:
20、
21、mrb=diag{m m izz}
22、
23、d(v)=diag{xu+xu|u||u| yv+yv|v||v| nr+nr|r||r|}
24、
25、
26、其中,th为水平面动力学参数已知项下水下机器人所需的推力和力矩,v=[u vr]为水下机器人体坐标系下的速度向量,mrb为刚性质量和惯量矩阵,crb(v)为刚性科氏力和离心力矩阵。
27、以下为本发明进一步限定的技术方案,总扰动力包括未知水动力参数项引起的未知水动力和外部扰动力;融合水下机器人水平面的运动学与动力学模型,建立水下机器人水平面二阶响应模型,如下:
28、
29、
30、
31、其中,τ为推进器的推力和力矩,τh为扰动力和力矩,y包含水下机器人惯性坐标系下的位置和航向角,jh为惯性坐标和体坐标的转换矩阵。
32、以下为本发明进一步限定的技术方案,设置系统状态量,如下:
33、
34、其中,由于水下机器人动力学参数存在不确定性,设置x3为系统的总扰动,包括参数不确定引起的扰动和外部扰动,s3*3是所有包含未知水动力参数组成的系数矩阵,即x3包含了内部的未知参数水动力和外界的扰动力,称为总扰动,则有状态空间表达式如下:
35、
36、其中,为系统已知参数矩阵,e3*3为三阶单位矩阵,03*3为三阶零矩阵。
37、以下为本发明进一步限定的技术方案,不完全微分的pd控制器输出,如下:
38、
39、以下为本发明进一步限定的技术方案,在水下机器人上设置水平侧向推进器,用于增强水下机器人抵抗横向扰动力的能力;在密封舱中安装惯导,用于获取水下机器人的位置和姿态提供给动力定位控制器。
40、相对于现有技术,本发明具有如下技术效果:
41、首先,本发明使用非稳态的数值模拟方法辨识水下机器人水动力参数,比水池试验法等简便、费用低,易于实现,比稳态模拟方法能更好地辨识动态过程中的参数量,适合于建立为水下机器人设计先进控制器所需的模型;
42、其次,通过辨识的水动力参数以及设计扩张观测器,所建立的动力定位控制器,能够及时补充扰动,具有较好的控制精度。
43、下面结合附图与实施例,对本发明进一步说明。
技术特征:1.一种扰动环境下水下机器人动力定位控制器的建立方法,其特征在于,包括以下步骤:
2.如权利要求1所述的一种扰动环境下水下机器人动力定位控制器的建立方法,其特征在于,力-速度和加速度相关性方程组,如下:
3.如权利要求2所述的一种扰动环境下水下机器人动力定位控制器的建立方法,其特征在于,通过水动力数值模拟计算获得的参数ma、d(v)和ca(v)称为水动力参数的已知项,在此,ma为附加质量矩阵、d(v)为线性及非线性阻力矩阵、ca(v)为附加质量产生的科氏力和离心力矩阵;参数辨识的误差称为惯性、科氏力和阻力三类水动力参数的未知项;
4.如权利要求3所述的一种扰动环境下水下机器人动力定位控制器的建立方法,其特征在于,总扰动力包括未知水动力参数项引起的未知水动力和外部扰动力;融合水下机器人水平面的运动学与动力学模型,建立水下机器人水平面二阶响应模型,如下:
5.如权利要求1所述的一种扰动环境下水下机器人动力定位控制器的建立方法,其特征在于,设置系统状态量,如下:
6.如权利要求1所述的一种扰动环境下水下机器人动力定位控制器的建立方法,其特征在于,不完全微分的pd控制器输出,如下:
7.如权利要求1所述的一种扰动环境下水下机器人动力定位控制器的建立方法,其特征在于,在水下机器人上设置水平侧向推进器,用于增强水下机器人抵抗横向扰动力的能力;在密封舱中安装惯导,用于获取水下机器人的位置和姿态提供给动力定位控制器。
技术总结本发明涉及一种扰动环境下水下机器人动力定位控制器的建立方法,步骤包括:使用DFBI模型在非稳态下的开展数值模拟计算辨识水下机器人动力学参数,利用已知参数项和总扰动项建立水下机器人动力定位时的扩张观测器,并在不完全微分的PD控制器的基础上,进行观测的已知参数项的水动力和未知总扰动力的补偿,完成控制器设计。首先,使用非稳态的数值模拟方法辨识水下机器人水动力参数,比水池试验法等简便、费用低,易于实现,比稳态模拟方法能更好地辨识动态过程中的参数量,适合于建立为水下机器人设计先进控制器所需的模型;其次,通过辨识的水动力参数以及设计扩张观测器,所建立的动力定位控制器,能够及时补充扰动,具有较好的控制精度。技术研发人员:陈铭治,朱大奇,刘原,李鸿飞,沈安锋,王超受保护的技术使用者:上海理工大学技术研发日:技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240730/198740.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表