一种极区无人水下航行器的冰下光学导引回收系统及方法
- 国知局
- 2024-07-31 23:49:57
本发明涉及的是一种极区无人水下航行器的冰下光学导引回收系统及方法,尤其是涉及一种无人水下航行器在冰层下方由矩形光源阵列的导引下循一定路径运动,最终准确到达预定位置实现回收的机器视觉与运动控制方法。
背景技术:
1、无人水下航行器(unmanned underwater vehicle,uuv)在海洋工程、海洋科考以及军事活动中发挥着越来越重要的作用。极地大部分地区的冰层受气候变化影响产生了极大地改变,全球变暖降低了海冰的厚度、年龄和覆盖范围,变薄的冰层还可能在以前无法穿越的地区开辟新的航道和贸易路线。此外,随着冰层的消退,为有价值的自然资源开采开辟了新的机会。冰下uuv作为一种新型极地勘测监测平台,由于其成本和使用灵活性的优势,在极地水下有着非常广阔的应用前景,并成为极地环境感知未来发展的主要趋势。uuv进行一段时间的水下作业后,由于能源不足或者任务完成,需要回收补充新的能源或者提取实验数据,这就要求uuv能够完成回收任务,成功进行能源补充或者数据提取,其中涉及多方面的关键技术。能源补给和数据交换是影响uuv作业时长和作业效率的两个重要因素。受自身携带能源和水下环境的制约,uuv的能源补给和数据交换一般需将其回收至母船后进行。母船释放回收过程作业强度高、危险性大,极大限制了uuv的工程化应用。水下对接技术为uuv在水下完成能源补给和数据交换创造了条件,规避了uuv布放回收过程自动化程度低、风险高、隐蔽性差等问题,近年来成为水下机器人研究领域的热点。同时为了提高uuv的回收效率,使uuv的自动化程度更高,uuv的自主归航与对接技术也成为各国科研人员重点研究的领域,并取得了一定成果。
2、uuv水下对接技术是借助于声学、光学、视觉等导引方式定位uuv与对接装置间空间位置关系,采取路径规划方式实现uuv与装置间对接的技术。美国woods hole海洋研究所和mit共同研制的odyssey iib auv水下对接系统[2],日本川崎重工的marine-bird水下对接系统,以及中国杭州电子科技大学团队的电磁导引回坞系统[3]等是较为典型的静态对接系统。由于对接装置固定在水下的特定区域,因此对接区域受限,长期使用时海水腐蚀及海洋生物附着对对接装置影响较大。动态对接区域在冰层下方,其对接装置周围环境不可控,其操作难度及危险系数相对较高,不适于在冰区实施。近年来,静态对接主要利用声学信标,如超短基线(ultra-short baseline,usbl)进行远距离初步导引,光学信标进行近距离精确导引的声光联合导引方法逐渐成为auv回收导引的主流方案[4]。park等[5]利用黑白相机捕捉五灯光阵列光源,采用传统的分割与形状处理方法成功进行了水池中15m距离位置姿态识别,但受限于光源的散射,没有很好地提取出灯光中心,误差较大。palomeras等[6]结合主被动信标,使用增强现实(augmented reality,ar)标记补充近距离视觉盲区,在湖水中完成了对接实验。liu等[7]提出检测、分割和位姿估计的识别框架,将yolo(you onlylook once)网络应用于水下基站识别。成功在湖水环境完成10m距离内的光学导引,但该算法会在神经网络检测丢失的情况下失效。lin等[8]利用单光源实现2自由度定位,结合视线导引(line-of-sight,los)方案完成了湖上20~30m距离的光学导引。
技术实现思路
1、本发明的目的是提供一种矩形光源阵列导引的无人水下航行器的冰下回收系统及方法,针对现有的水下对接回收平台的导引对接操作难度大、稳定性差、安全性差、易受水下环境因素干扰、声学导引精度差等问题,该方法使无人水下航行器能够实现高稳定性、高安全性、高鲁棒性、高成功率、高精度的冰下自主对接,并且理论上可通过调整矩形光源阵列的长度及宽度和增加光源数量得到满足实际工程需求的有效导引深度。
2、无人水下航行器的光学导引回收系统的主要组成结构包括:
3、(1)具有典型舵桨联合操纵的欠驱动形式的无人水下航行器,在其艏部上方安装光学摄像机,在其艏艉横向管道内安装侧向推进器,在其艉部两侧安装主推进器,在其艉部安装高度计,安装超短基线应答机,在其水密的控制舱中搭载光学图像处理单元和运动控制单元,光学图像处理单元通过以太网tcp协议调节光学摄像机对焦变焦,通过同轴视频信号线缆采集光学摄像机的图像数据并进行处理,运动控制单元通过rs232串口连接采集高度计的数据,光学图像处理单元与运动控制单元之间通过以太网udp协议进行数据交换和通信;
4、(2)搭载矩形光源阵列的井状冰上导引回收平台,在井口内侧安装六只矩形排列的光源以标记精确的对接回收位置,安装光源的刚性杆状构件由平台内侧延伸出一定距离,并使光源没入水中一定距离,井口侧面放置内含多串口服务器的岸端控制箱,通过以太网udp控制灯的亮度,超短基线发射接收机布置在井口附近。
5、本发明的目的由以下步骤实现:
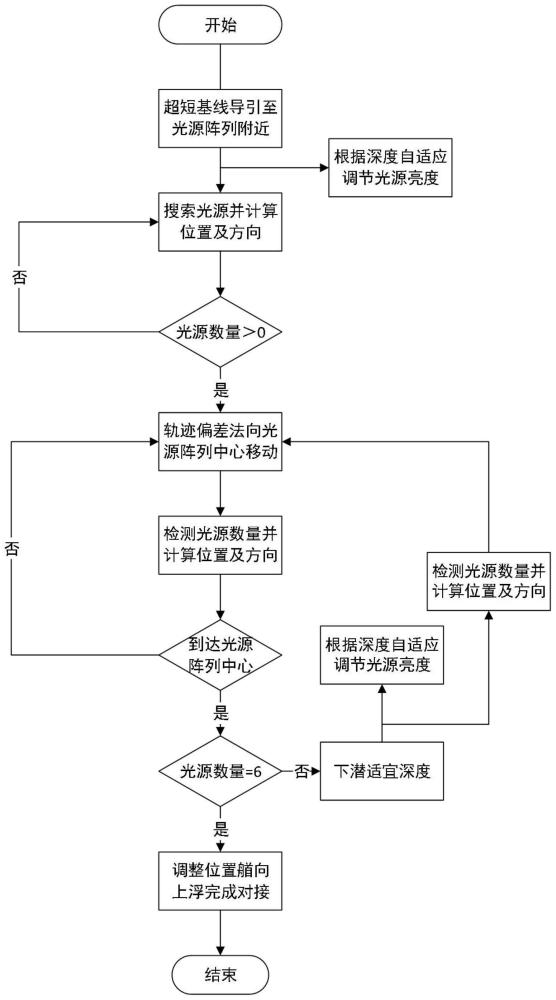
6、第一步,无人水下航行器通过超短基线声学导引至回收平台附近进行辐射式搜索,运动控制单元通过采集高度计的数据,将无人水下航行器上浮至合适的搜索深度,通过水声通信将深度信息编码发送到岸端控制箱,通过串口服务器调节光源至导引亮度,转至第二步:
7、第二步,图像处理单元通过上视光学摄像机采集图像并进行检测,判断是否发现导引光源,若为否,继续进行辐射式搜索,若为是,转至第三步;
8、第三步,图像处理单元采集最新一帧图像进行光源检测,并计算出导引光源阵列中心相对航行器的位置和方向,发送到运动控制单元,发送成功后转至第四步;
9、第四步,运动控制单元通过图像处理单元提供的信息,基于模糊pid控制器和s面控制器的两层跟踪控制体系调整无人水下航行器的运动方向并向目标点移动,调整完成后转至第五步;
10、第五步,图像处理单元采集最新一帧图像进行光源检测,并计算光源阵列中心位置和方向,判断检测到的光源数量,若航行器到达光源阵列中心时,转至第六步,否则,重复第三步;
11、第六步,图像处理单元采集连续多帧图像进行光源检测,若采集到的30帧光源数量为6的图像,运动控制单元通过图像处理单元提供的信息基于s面控制器完成航行器转向,转向完成后,此时航行器艏向与矩形光源阵列长边平行,转至第七步,若采集到30帧光源数量小于6的图像,运动控制单元控制航行器下潜一定深度,并将高度计采集到的深度信息编码通过水声通信发送到岸端控制箱,线性增加光源至合适亮度,转至第三步;
12、第七步,将航行器中心移动到光源阵列中心,调整完成后无人航行器到达导引回收平台下方预定对接回收位置,运动控制单元通过采集高度计的数据,进行阶段性上浮,无人水下航行器浮出冰井水面,本流程运行结束。
13、本发明在技术方面的有益效果在于:
14、(1)本发明在超短基线声学导引基础上,提出了末端光学导引方法,提高回收的末端精度,保证了回收过程的高精确性和高成功率;
15、(2)本发明采用布置在冰井内侧的矩形引导光源阵列的形式,可根据实际应用需求调整矩形光源阵列的长度及宽度和增加光源数量以达到合适的有效导引深度,并且回收装置放置于冰井水面,利于监测的同时,保证了回收过程的高鲁棒性和高安全性;
16、(3)本发明中采用光学摄像机采集导引光源的图像,通过对图像进行基于深度学习的实时目标检测方法得到单个光源中心位置,计算出已发现光源的区域中心位置和方向,采用模糊pid控制器输出补偿艏向角,保证了回收过程的高精确性和高稳定性;
17、(4)本发明中采用通过水声通信将深度信息编码解码发送到岸端控制箱,自适应调节光源亮度,保证光学导引回收过程中无人水下航行器可以检测到光源目标,保证了回收过程的高鲁棒性和高稳定性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198729.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表