机器人乘梯控制方法与流程
- 国知局
- 2024-07-31 23:49:52
本发明涉及电梯,具体涉及一种机器人乘梯控制方法。
背景技术:
1、随着机器人的技术进步与应用范围的不断拓展,机器人被越来越广泛的应用在各种场景中,目前机器人乘梯已经成为电梯领域中的一个研究和应用热点。
2、现有技术中,在机器人乘梯过程中,通常是预先选定一个与电梯门间距离为给定值且大致位于电梯门中间的点作为进梯点,并在进梯点相对于电梯门的另外一侧确定一个候梯区域,这样首先控制点击确认进入候梯区域等待电梯,在电梯抵达后控制机器人由候梯区域移动至进梯点,然后控制机器人沿电梯轿厢进深方向移动至轿厢内,至此完成对电梯机器人乘梯中的进梯控制,如cn201911253650.6、cn202211406738.9和cn201911252566.2。但是在这些现有技术中,并未考虑一些大型机器人进出电梯轿厢的场景。
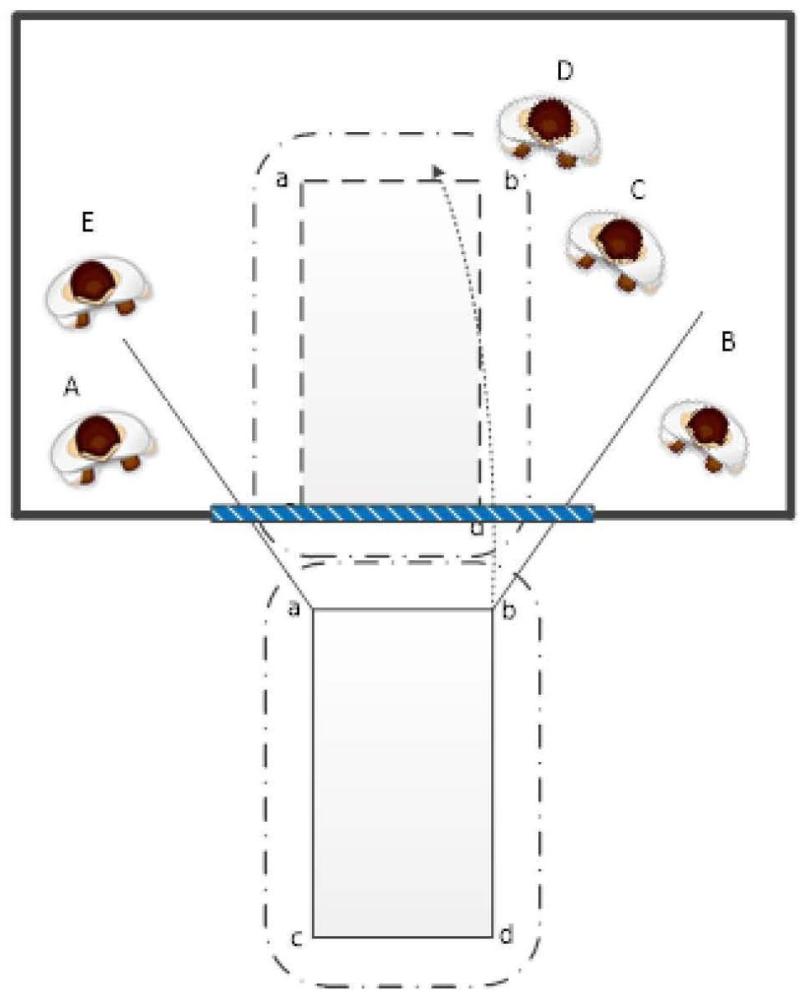
3、如图1所示,例如一种大型机器人,为长方形本体,且宽度略窄与电梯开门宽度、长度大致相当于电梯轿厢进深的三分之二,因此整个机器人大外形尺寸相对于电梯轿厢而言相对较大。机器人由轿厢外的进梯点进入轿厢直至机器人整体进入轿厢这一过程中,机器人前端(a点和b点及其连线)在轿厢内相对于轿厢进深方向的移动距离相对很长(尤其是在考虑机器人的安全距离后尤为明显)。显然,即使是如图中所示,机器人在刚刚完全进入轿厢(考虑安全距离,即机器人的后端与电梯门之间的距离首次到达安全距离)所在的位置后立即停止,则机器人在轿厢进深方向的移动距离也达到了机器人长度与安全距离的和。机器人要顺利进入电梯轿厢,如图1中轿厢内的点划线所覆盖的全部区域都不能存在任何被占用的地方,在工程实践中是很难满足的。现有技术通常是机器人在进入轿厢前,提示占用乘客进行避让,但由于此时机器人距离需要避让的乘客较远,避让的乘客可能会因为意识到其需要避让而不能及时避让或者因其周边相对拥挤而不方便避让,从而导致机器人无法进入轿厢,即使是乘客能够避让且实施了避让,但却降低了避让乘客的乘梯体验;或者是机器人在进入轿厢的过程中与需避让乘客间的距离到达阈值的时候提示乘客实施避让,如果需避让乘客因某些原因未能正确实施避让,则可能导致机器人未能完全进入轿厢从而导致其后端与电梯门干涉(即电梯关门时碰到机器人或与机器人距离过小),为保证安全,机器人需要推出轿厢,放弃本次乘梯。出现上述这些的根本原因在于现有技术中,对于大型机器人(如医用货运机器人)的乘梯,都是在进梯前预先确定机器人进入轿厢时的移动路径——直线路径。之所以采用直线路径,是因为机器人形体较大,采用直线路径简单、易于实现。因为对于如图1中的大型机器人而言,当其进行转弯时,不但需要考虑其前端的障碍物避让问题,还需要考虑较长的车身在转弯时同一侧的前端与后端间的转弯半径差的问题。
4、正如前述分析可知,直线路径虽然简单易行,但却存在导致乘客乘梯体验差、特殊情况下导致机器人乘梯失败、不能根据轿厢内的实际占用情况灵活应对等缺点。
技术实现思路
1、本发明要解决的技术问题是提供一种能让大型机器人根据轿厢内的实际占用情况灵活进入轿厢的技术方案。
2、为解决上述技术问题,本发明提供一种机器人乘梯控制方法,包括:
3、步骤t1、根据机器人的外形和安全距离,构建机器人需要的占用区域;
4、步骤t2、利用机器人的传感器构建一个检测范围为所述占用区域的检测区域;
5、步骤t3、确定机器人的进梯点位置、进梯点的移动方向以及以进梯点为起点的第一移动路径,所述移动方向使得所述检测区域沿初始移动方向和第一移动路径向前推移时不会碰到电梯门两侧端点,所述第一移动路径为以进梯点为起点沿移动方向且指向电梯门方向的射线;
6、步骤t4、将检测区域沿移动方向向前推移直至第一条件成立时停止,所述第一条件包括:条件11、检测区域内出现障碍物;条件12、检测区域已经完全位于电梯轿厢内;
7、步骤t5、辨识检测区域停止前移时成立的第一条件,且当条件11成立时,进入下一步骤,当条件12成立时转入步骤t10;
8、步骤t6、将停止前移时的前侧区域位置作为第一点,并根据障碍物相对于检测区域的位置确定第二点的位置,所述第二点为与检测区域在第一点沿原前移方向继续下一次前移后的检测区域位置且在电梯进深方向上相对于第一点有所前移的检测区域位置;
9、步骤t7、调整第二点的位置直至第二点满足第二条件,所述第二条件包括:条件21、对应于第二点的检测区域内没有障碍物;条件22、第一点与第二点之间存在至少一条可行的第二移动路径,所述第二移动路径是指规划得到的以第一点为起点且以第二点为终点的移动路径,所述可行的第二移动路径是指检测区域沿可行的第二移动路径移动的整个过程中检测区域不会遇到障碍物;
10、步骤t8、将第一移动路径更新为第一移动路径与第二移动路径的组合;
11、步骤t9、判断位于第二点的检测区域是否完全位于轿厢内,若是则转入下一步骤,否则将第一移动路径在第二点处的切线作为移动方向,将第一点更新为第二点,返回步骤t4;
12、步骤t10、将所述第一移动路径作为机器人移动路径,并控制机器人沿所述机器人移动路径进入电梯轿厢。
13、优选地,所述步骤t7确定障碍物位于检测区域在移动方向上的中心线的哪一侧以及与中心线间的第一距离,并根据确定的哪一侧和第一距离调整第二点的位置。
14、优选地,所述步骤t7将所述第二点调整至原第二点相对于检测区域在移动方向上的中心线的镜像处,或者是将所述第二点调整至将原第二点向原第二点相对于检测区域在移动方向上的中心线另一侧的方向移动第一距离后得到的位置处。
15、优选地,所述步骤t7通过改变所述第一距离的大小来实现对第二点的再次调整。
16、优选地,所述步骤t7在每次完成对第二点的调整后按照如下步骤判断第二条件是否成立:步骤s1、判断条件21是否成立,若是则进入下一步骤,否则再次调整第二点直至条件21成立;步骤s2、规划第一点与第二点之间的第二移动路径;步骤s3、判断第二移动路径是否为可行的第二移动路径,若是则返回步骤t8,否则再次调整第二点并返回步骤s1。
17、优选地,如果经过预设次数的调整和规划都不能使得第二条件成立,所述步骤t7根据对应于第二点的检测区域内的障碍物以及检测区域沿第二移动路径移动时的障碍物确定需要实施避让的避让乘客,并提醒避让乘客进行避让。
18、与现有技术相比,本发明能让大型机器人根据轿厢内的实际占用情况灵活进入轿厢。
技术特征:1.一种机器人乘梯控制方法,其特征在于,包括:
2.根据权利要求1所述的机器人乘梯控制方法,其特征在于,所述步骤t7确定障碍物位于检测区域在移动方向上的中心线的哪一侧以及与中心线间的第一距离,并根据确定的哪一侧和第一距离调整第二点的位置。
3.根据权利要求2所述的机器人乘梯控制方法,其特征在于,所述步骤t7将所述第二点调整至原第二点相对于检测区域在移动方向上的中心线的镜像处,或者是将所述第二点调整至将原第二点向原第二点相对于检测区域在移动方向上的中心线另一侧的方向移动第一距离后得到的位置处。
4.根据权利要求3所述的机器人乘梯控制方法,其特征在于,所述步骤t7通过改变所述第一距离的大小来实现对第二点的再次调整。
5.根据权利要求2所述的机器人乘梯控制方法,其特征在于,所述步骤t7在每次完成对第二点的调整后按照如下步骤判断第二条件是否成立:
6.根据权利要求5所述的机器人乘梯控制方法,其特征在于,如果经过预设次数的调整和规划都不能使得第二条件成立,所述步骤t7根据对应于第二点的检测区域内的障碍物以及检测区域沿第二移动路径移动时的障碍物确定需要实施避让的避让乘客,并提醒避让乘客进行避让。
7.根据权利要求6所述的机器人乘梯控制方法,其特征在于,所述步骤t7通过控制机器人或轿厢内的投射装置向轿厢地板投射用于轿厢内乘客辨识并确定自己是否需要避让机器所需的标示实现对避让乘客的提醒。
8.根据权利要求5所述的机器人乘梯控制方法,其特征在于,当机器人移动方向为第一移动路径在调整后的第二点处的切线方向且检测区域位于调整后的第二点处时,如果检测区域内没有障碍物,则所述步骤s1判定条件21成立。
9.根据权利要求5所述的机器人乘梯控制方法,其特征在于,针对第二移动路径中的每个点,当机器人移动方向为第二移动路径在该点处的切线方向且检测区域位于该处时,如果检测区域内没有障碍物且检测区域与障碍物之间的最小距离大于第一距离阈值,则步骤s3判定第二移动路径为可行的第二移动路径,所述第一距离阈值为第二移动路径在该点处的曲率的增函数。
10.根据权利要求1所述的机器人乘梯控制方法,其特征在于,在所述步骤t1构建的占用区域中,位于机器人移动方向一侧的占用区域边界与机器人本体间的距离大于其余的占用区域边界与机器人本体间的距离。
11.根据权利要求5所述的机器人乘梯控制方法,其特征在于,当步骤s3判定存在多条可行的第二移动路径时,所述步骤s3按照如下任一方式确定最终的可行的第二移动路径:
12.根据权利要求5所述的机器人乘梯控制方法,其特征在于,所述步骤s2规划第二移动路径的方法为:
13.根据权利要求12所述的机器人乘梯控制方法,其特征在于,所述第二距离使得所述圆弧的半径不小于半径阈值。
14.根据权利要求5所述的机器人乘梯控制方法,其特征在于,所述步骤s2规划第二移动路径的方法为:
技术总结本发明公开了一种机器人乘梯控制方法,包括:步骤T1、构建机器人需要的占用区域;步骤T2、构建一个检测区域;步骤T3、确定机器人的进梯点位置、移动方向以及第一移动路径;步骤T4、将检测区域沿移动方向向前推移直至第一条件成立时停止;步骤T5、辨识检测区域停止前移时成立的第一条件;步骤T6、将停止前移时的前侧区域位置作为第一点,并根据障碍物相对于检测区域的位置确定第二点的位置;步骤T7、调整第二点的位置直至第二点满足第二条件;步骤T8、将第一移动路径更新为第一移动路径与第二移动路径的组合;步骤T9、判断位于第二点的检测区域是否完全位于轿厢内;步骤T10、将所述第一移动路径作为机器人移动路径,并控制机器人进入电梯轿厢。技术研发人员:陈玉东受保护的技术使用者:上海三菱电梯有限公司技术研发日:技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240730/198720.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。