一种人工脑控制的机器人目标跟踪闭环训练方法和系统
- 国知局
- 2024-07-31 23:49:10
本发明涉及目标跟踪闭环训练,尤其涉及一种人工脑控制的机器人目标跟踪闭环训练方法和系统。
背景技术:
1、目前,揭示大脑感知以及学习记忆等高级认知功能的工作机制是当前神经科学领域的研究热点之一。但是,将人或动物作为研究对象不仅面临巨大的伦理问题,而且存在技术操作难度大,脑区结构复杂等问题,导致探究机制受多种因素干扰。因此,保留与人脑相类似的结构和功能的体外培养人工脑是研究大脑信息处理机制的理想模型,对理解复杂神经系统的学习记忆等高级认知功能的工作机理具有重要意义。
2、现有技术中,通过将细胞植入微电极阵列(micro electrode arrays,即meas)芯片上进行离散培养,神经元可逐渐发育形成突触耦合的神经元网络,研究人员能够利用导电电极或其他敏感半导体器件,非侵入性地同时记录和刺激多个位点的电生理活动,可见,基于meas对人工脑进行培养,并构建人工脑控制的机器人目标跟踪系统是研究人工脑学习和感知等工作机制的重要方式和有效应用。但是,人工脑具有显著的电生理活动等特殊性,具有培养周期长、培养成本高、易疲劳死亡等缺点,因此,如何构建高效的、可学习的、且由人工脑控制的机器人目标跟踪系统,对神经元的信息处理机制研究和大脑认知功能的研究具有重要意义。
3、因此,现有技术还有待改进和提高。
技术实现思路
1、本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种人工脑控制的机器人目标跟踪闭环训练方法和系统,旨在解决现有技术中无法构建高效的、可学习的、且由人工脑控制的机器人目标跟踪系统,无法对神经元的信息处理机制和大脑认知功能进行深入研究的问题。
2、为了解决上述技术问题,本发明所采用的技术方案如下:
3、第一方面,本发明提供一种人工脑控制的机器人目标跟踪闭环训练方法,其中,所述方法包括:
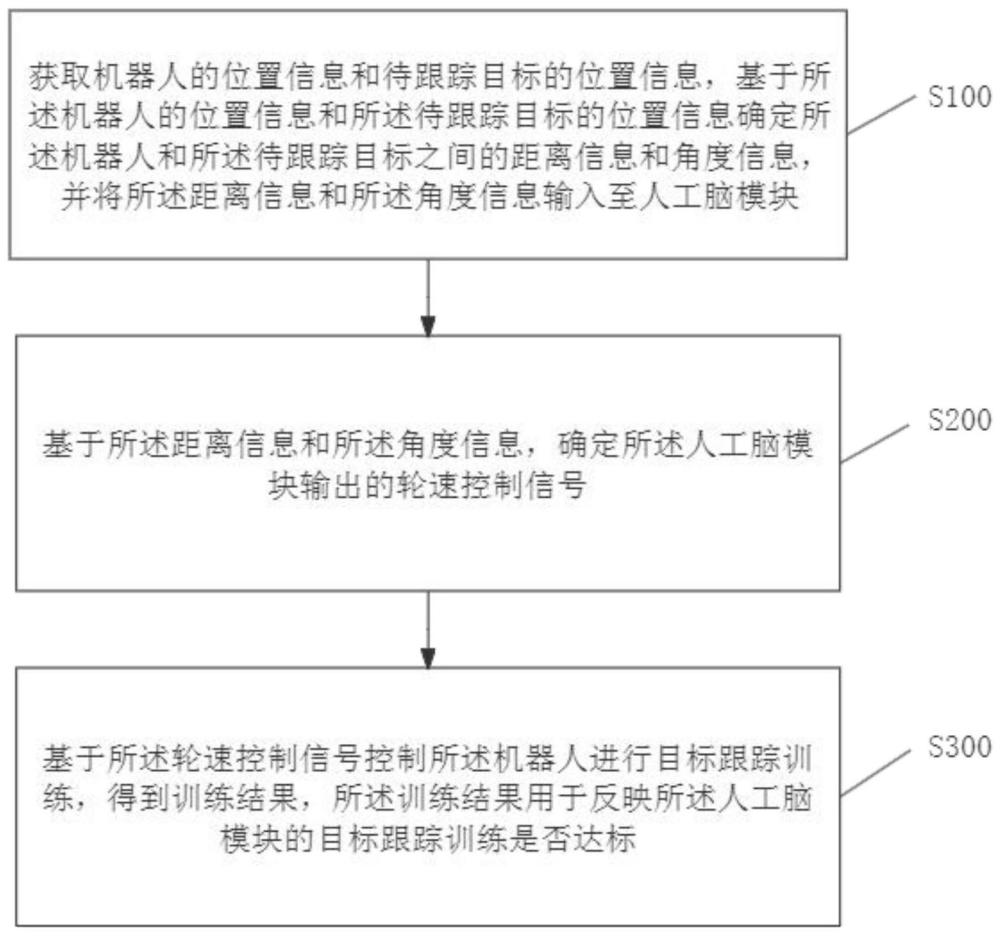
4、获取机器人的位置信息和待跟踪目标的位置信息,基于所述机器人的位置信息和所述待跟踪目标的位置信息确定所述机器人和所述待跟踪目标之间的距离信息和角度信息,并将所述距离信息和所述角度信息输入至人工脑模块;
5、基于所述距离信息和所述角度信息,确定所述人工脑模块输出的轮速控制信号;
6、基于所述轮速控制信号控制所述机器人进行目标跟踪训练,得到训练结果,所述训练结果用于反映所述人工脑模块的目标跟踪训练是否达标。
7、在一种实现方式中,所述获取机器人的位置信息和待跟踪目标的位置信息,基于所述机器人的位置信息和所述待跟踪目标的位置信息确定所述机器人和所述待跟踪目标之间的距离信息和角度信息,包括:
8、获取机器人的位置信息和待跟踪目标的位置信息,基于所述机器人的位置信息和所述待跟踪目标的位置信息确定所述机器人在预设区域内与所述待跟踪目标的相对位置信息;
9、基于所述相对位置信息,确定所述机器人和所述待跟踪目标之间的距离信息和角度信息。
10、在一种实现方式中,所述将所述距离信息和所述角度信息输入至人工脑模块,包括:
11、对所述距离信息和所述角度信息进行编码,得到刺激信息,通过信号刺激器将所述刺激信息输入至人工脑模块。
12、在一种实现方式中,所述对所述距离信息和所述角度信息进行编码,得到刺激信息,通过信号刺激器将所述刺激信息输入至人工脑模块,包括:
13、将所述距离信息和所述角度信息进行归一化,得到目标距离信息,所述目标距离信息为:
14、
15、其中,d为所述目标距离信息,θ为所述角度信息,d为所述距离信息,dmin和dmax为预设的用于距离归一化常数;
16、对所述目标距离信息进行线性映射,得到刺激信息,所述刺激信息为:
17、
18、其中,s为刺激信息,所述刺激信息用于反映刺激信号的刺激频率,fmax为预设的最大刺激频率,fmin为预设的最小刺激频率。
19、在一种实现方式中,所述基于所述距离信息和所述角度信息,确定所述人工脑模块输出的轮速控制信号,包括:
20、基于输入至人工脑模块的所述刺激信息,得到人工脑的输出神经信号;
21、将所述输出神经信号进行解码,得到目标轮速控制信号。
22、在一种实现方式中,所述基于所述轮速控制信号控制所述机器人进行目标跟踪训练,包括:
23、基于所述目标轮速控制信号控制所述机器人进行目标跟踪训练,并实时获取所述机器人和所述待跟踪目标的当前距离信息;
24、根据所述当前距离信息确定所述机器人的当前跟踪效果,并基于所述当前跟踪效果执行相应的激励刺激;
25、其中,所述根据所述当前距离信息确定所述机器人的当前跟踪效果,并基于所述当前跟踪效果执行相应的激励刺激,包括:
26、当所述当前距离信息大于预设的距离阈值时,确定所述当前跟踪效果不佳,并对所述人工脑进行惩罚刺激,所述惩罚刺激采用的是高幅值、低频率的惩罚刺激信号;
27、当所述当前距离信息小于预设的距离阈值时,确定所述当前跟踪效果良好,并对所述人工脑进行奖励刺激,所述奖励刺激采用的是低幅值、高频率的奖励刺激信号。
28、在一种实现方式中,所述基于所述轮速控制信号控制所述机器人进行目标跟踪训练,得到训练结果,所述训练结果用于反映所述人工脑模块的目标跟踪训练是否达标,包括:
29、采集一段时间内所述机器人与所述待跟踪目标之间的若干距离数据,并计算所述若干距离数据的平均距离;
30、基于所述平均距离,确定所述训练结果;
31、当所述平均距离大于预设的距离阈值时,确定所述训练结果为训练不达标;
32、当所述平均距离小于预设的距离阈值时,确定所述训练结果为训练达标。
33、第二方面,本发明实施例还提供一种人工脑控制的机器人目标跟踪闭环训练系统,其中,所述系统包括:人工脑模块、目标跟踪模块、数据处理模块和闭环控制模块;
34、所述目标跟踪模块,用于获取机器人的位置信息和待跟踪目标的位置信息,基于所述机器人的位置信息和所述待跟踪目标的位置信息确定所述机器人和所述待跟踪目标之间的距离信息和角度信息,并将所述距离信息和所述角度信息输入至所述人工脑模块;
35、所述数据处理模块,用于基于所述距离信息和所述角度信息,确定所述人工脑模块输出的轮速控制信号;
36、所述闭环控制模块,用于基于所述轮速控制信号控制所述机器人进行目标跟踪训练,得到训练结果,所述训练结果用于反映所述人工脑模块的目标跟踪训练是否达标。
37、第三方面,本发明实施例还提供一种终端设备,其中,所述终端设备包括存储器、处理器及存储在存储器中并可在处理器上运行的人工脑控制的机器人目标跟踪闭环训练程序,处理器执行所述人工脑控制的机器人目标跟踪闭环训练程序时,实现上述方案中任一项的人工脑控制的机器人目标跟踪闭环训练方法的步骤。
38、第四方面,本发明实施例还提供一种计算机可读存储介质,其中,计算机可读存储介质上存储有人工脑控制的机器人目标跟踪闭环训练程序,所述人工脑控制的机器人目标跟踪闭环训练程序被处理器执行时,实现上述方案中任一项所述的人工脑控制的机器人目标跟踪闭环训练方法的步骤。
39、有益效果:与现有技术相比,本发明提供了一种人工脑控制的机器人目标跟踪闭环训练方法,首先获取机器人的位置信息和待跟踪目标的位置信息,基于所述机器人的位置信息和所述待跟踪目标的位置信息确定所述机器人和所述待跟踪目标之间的距离信息和角度信息,并将所述距离信息和所述角度信息输入至人工脑模块。然后,基于所述距离信息和所述角度信息,确定所述人工脑模块输出的轮速控制信号。最后,基于所述轮速控制信号控制所述机器人进行目标跟踪训练,得到训练结果,所述训练结果用于反映所述人工脑模块的目标跟踪训练是否达标。因此,本发明提供一种高效的人工脑学习和训练方案,通过将机器人和待跟踪目标之间的距离信息和角度信息相结合的编码方式,能够有效提高人工脑模块的控制精度,进一步保障了人工脑控制的机器人目标跟踪闭环训练效果。同时,本发明对神经元的信息处理机制研究和大脑认知功能的研究具有重要启发意义。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198667.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表