一种纱筒数据自动采集装置及其数据采集、处理方法
- 国知局
- 2024-07-31 23:50:04
本发明涉及纺织机械领域,具体是一种纱筒数据自动采集装置及其数据采集、处理方法。
背景技术:
1、纺织行业目前仍是劳动密集型产业,这种劳动密集型的生产模式对人力资源的依赖度很高。然而,随着国内人力成本的持续上升,这使得企业的经营成本不断增加。因此,引入自动化和智能化的纺织机械设备成为了行业发展的必然趋势。
2、近年来,随着人工智能、机器视觉、深度学习,智能控制等新技术的研究和应用,纺织行业的自动化、智能化控制普及程度越来越高。但是自动化和智能化的应用需要基于大量的数据采集和数据分析。传统的数据采集大部分依赖人工采集,人工采集方法往往自动化程度不高,数据采集误差大,面对大量重复性工作时,容易疲劳出错影响后期数据处理和分析的准确度,影响后续自动化设备的可靠性,降低自动化设备的生产效率。
3、纱筒数据采集,针对纱筒数据进行模型的分析和训练一直是提高纺织自动化设备可靠性的核心。采用纱筒数据自动采集装置可以应用于纺织厂复杂多样的生成环境,不仅可以提高数据采集的精准度和数量,而且可以节约人工采集造成的人力成本。但是目前传统的纱筒主要通过人工巡检方式进行,并且对于纱筒的实时运行情况不了解。并且纺织行业尚未有自动采集装置代替人工数据采集的解决方案和应用实例,导致数据采集精度不高,数据采集规模小,从而无法建立相关的数据分析模型,导致无法实现高度而准确的自动化和智能化。本发明通过图像采集系统配合agv自动巡检系统,能够实时监测纱筒运行状态,为后续的自动换筒、工艺流程优化提供数据支撑。
4、为了解决上述问题,本案由此而生。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种纱筒数据自动采集装置及其数据采集、处理方法,解决了上述背景技术中提出的问题。
3、(二)技术方案
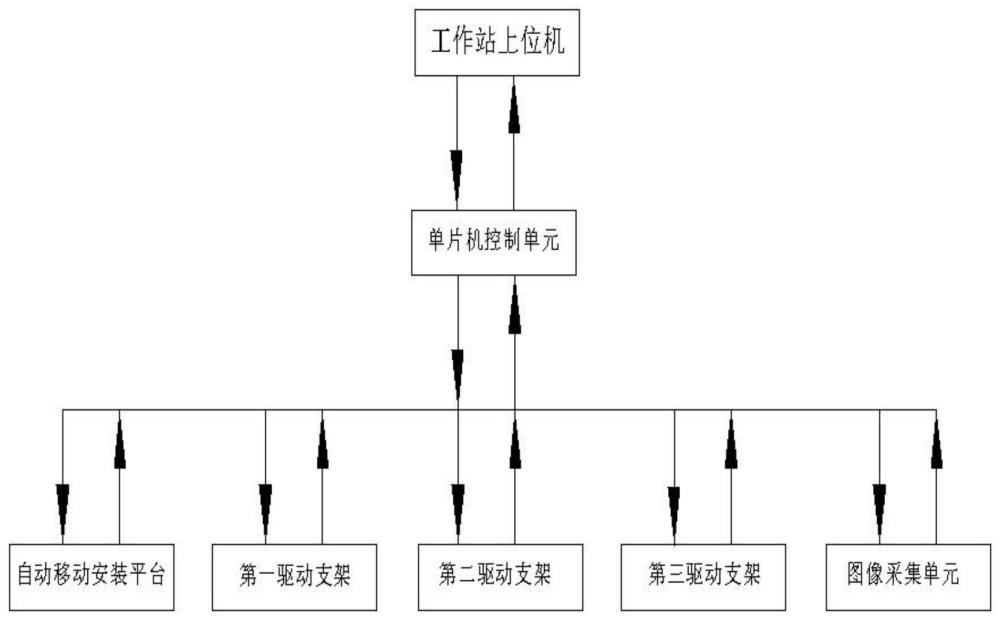
4、为实现以上目的,本发明通过以下技术方案予以实现:本发明由自动移动安装平台,单元机控制单元,自动调节组件,图像采集单元和工作站上位机组成,实现适用于在纺织厂复杂的生产环境中对纱筒图像自动采集,结构清晰,可靠性高;利用视觉检测技术对完成备纱架上目标纱筒进行拍摄,利用图像处理、目标检测技术精准判断纱筒在备纱架的位置情况和实际拍摄误差,然后工作站上位机通过单元机控制单元控制装置进行拍摄位置和角度的调整,降低拍摄的误差,判断精准,图像采集快速。
5、本发明是采用如下技术方案实现其发明目的的:
6、一种纱筒数据自动采集装置,包括四大模块和工作站上位机;所述第一模块为自动移动安装平台,包括安装平台,4组万向轮,4组小型驱动电机以及陀螺仪装置组成。安装平台固定安装其它三组模块,平台上移动把手可以实现人工移动整套装置,移动把手可以折叠放在安装平台上,达到收放时节省空间的作用。4组万向轮可以通过第二模块单元机控制单元控制驱动电机实现转动,陀螺仪装置可以获取装置的速度和加速度,由工作站上位机通过积分运算对整套装置进行导航定位,实现整套装置在任意方向准确灵活移动与自动巡检。
7、所述第二模块是单元机控制单元,由电器盒和4块单片机组成。模块之间通信支持以太网、串口、usb等有线和wifi、蓝牙、zigbee等无线连接。电器盒安装在第一模块自动移动安装平台上,电器盒中间设有缺口,方便其他模块的控制引线接入。
8、所述第三模块是自动调节组件,由第一驱动支架,第二驱动支架,第三驱动支架组成。第一驱动支架为主安装支架,侧边刻有刻度尺线,由丝杆机构和驱动电机组成,驱动电机控制丝杆传动。第二驱动支架安装固定在第一驱动支架上,由丝杆机构和驱动电机组成,侧边刻有刻度尺线。工作站上位机通过控制第一驱动支架传动,实现可以控制第二驱动支架在y轴方向精准上下移动。第二驱动支架的当前位置和移动位移可以通过第一驱动支架侧边的刻度尺线确定,也可以通过工作站上位机确定。第三驱动支架安装固定在第二驱动支架上,侧边刻有刻度尺线,由丝杆机构和驱动电机组成。工作站上位机可以通过控制第二驱动支架传动,实现第三驱动支架在x轴方向的左右精准移动。第三驱动支架的当前位置和移动位移可以通过第二驱动支架侧边的刻度尺线确定,也可以通过工作站上位机确定。
9、所述第四模块是图像采集单元,由相机稳定器,光源调节单元,测距传感器,工业相机组成。相机稳定器由相机固定支架和稳定器组成。相机固定支架安装在第三驱动支架上,并且相机固定支架上有3个安装位,实现稳定器的灵活安装。稳定器安装固定在相机固定支架上,稳定器由固定夹板,安装轴,手动丝杆机构组成,在实际工作中可以安装多种尺寸型号的工业相机。
10、测距传感器安装在固定夹板后面,精确检测工业相机的位置,使拍摄的图像在后续轮廓拟合和图像处理时方便处理。光源调节单元集成在测距传感器内部,可以实现拍摄时光源的调节。工业相机采集到的图像通过rs485、rs232、usb等通信接口传输至单元机控制单元,单元机控制单元再传输给上位机工作站实现图像处理。
11、一种纱筒数据自动采集方法,采用以下步骤进行操作:
12、s1,首先拧动手动丝杆机构,使固定夹板夹紧工业相机。
13、s2,工作站上位机与单元机控制单元进行通讯,可以控制自动移动安装平台移动到需要采集纱筒图像的位置。
14、s3,根据现场情况,工作站上位机通过单元机控制单元分别控制启动三个驱动电机,使其带动输出端的丝杆机构进行传动,调整不同驱动支架和相机固定支架的位置,使工业相机位置满足采集数据位置要求。
15、s4,上位机根据现场光线情况打开光源调节单元,调整拍摄的光线亮度。
16、s5,工业摄像机按照工作站上位机软件设计的图像采集程序对纱筒图像进行自动拍摄采集,采集数据实时传输回工作站上位机软件进行保存和实时图像处理,直至图像采集程序完成。
17、一种纱筒数据图像处理方法如下:
18、步骤一,相机参数标定和矫正,通过张氏标定法计算所用单目工业相机的内参数和畸变系数,然后对工业相机进行畸变矫正。
19、步骤二,图像预处理,工作站上位机将图像处理单元采集的纱筒图像运用大津法(ostu)进行图像二值化处理,将目标纱筒与背景明显区分,提高后续图像的处理速度。
20、步骤三,边缘检测,采用改进的canny边缘检测,找出纱筒图像的整体轮廓,为下一步识别出纱筒图像做准备。
21、本方法改进的canny边缘检测算法使用三个算子来检测目标纱纱筒图像中的水平、垂直和左下对角边缘。边缘检测的算子分别检测图像的水平ix方向的边缘和竖直iy方向的边缘,之后计算梯度的方向θ和幅值g:
22、
23、
24、梯度方向θ取值0°,45°,90°;
25、步骤四,均值滤波,过滤去除图像中除目标纱筒轮廓多余轮廓线条,减少图像噪声的影响。
26、均值滤波把每个像素都当成滤波核的核心,然后计算出核内所有像素的平均值,最后让核心像素等于这个平均值。均值滤波公式为:
27、
28、其中f′(x,y)是含有噪声的原始图像,g(x,y)是经过均值滤波之后得到的图像,s是以点(i,j)为中心的模板中像素的集合,模板尺寸为m×n。
29、步骤五,霍夫圆检测和拟合,识别目标纱筒轮廓并进行轮廓拟合,同时将拟合产生的圆心坐标,轮廓半径和目标轮廓面积这些数据进行输出打印。
30、霍夫圆检测完以后产生一组离散的点,改进的圆拟合方法是用最小二乘法在这一组离散的点集来拟合出一个圆形模型。通过最小化数据点到圆的距离的平方和来求解圆的参数。计算过程如下:
31、给定的数据点集合为
32、圆的方程为(x-a)2+(y-b)2=r2,其中a,b为目标轮廓的像素点坐标,r为目标轮廓的半径。
33、最小二乘拟合的目标函数为对目标函数分别对a,b,r求偏导,并令其为零。
34、
35、求解得到解析表达式,则可以计算出最优的参数a,b,r。
36、步骤六,将步骤五产生的数据保存成标签文本文件和目标纱筒轮廓拟合图片一起导出。
37、(三)有益效果
38、采用上述技术方案后,本发明提供的一种纱筒数据自动采集装置及其数据采集、处理方法,与现有技术相比具有以下有益效果:
39、1、一种纱筒数据自动采集装置,进行了模块化设计安装,实际使用时安装简单、快捷。各个模块相互配合使整套装置可以实现自动巡检,能够实时监测和采集纱筒数据。主体由三组驱动支架相互连接固定,通过工作站上位机可以分别启动每个驱动支架的驱动电机,使其带动输出端的丝杆机构传动,驱动支架的位置可以精确控制移动,从而灵活和精准的调整工作相机采集的位置,大大减小当前人工进行大批量和多对照组图像采集出现的误差。工作相机位置的灵活调整使得该装置可以适用于纺织厂复杂的生产环境。使用结束时,该装置可灵活拆卸和折叠,减少装置的占地面积。
40、2、该纱筒数据自动采集方法、数据图像处理方法,首先工作站上位机通过单元机控制单元,控制整个装置移动到目标位置,控制各个驱动支架的驱动电机调节工业相机至纱筒纱筒的最佳拍摄位置,然后采集的数据通过单元机控制单元传输给工作站上位机,进行图像处理和识别工作,并将输出的数据和图像导出可。本方法通过工作站上位机编写的软件控制平台,就可以准确的实现远程控制进行纱筒数据自动采集,并显示实时数据,记录保存历史数据等功能。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198744.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表