一种基于COMSOL-Simulink联合仿真的电磁阻力控制方法
- 国知局
- 2024-07-31 23:49:35
本发明涉及电磁阻力调控领域,具体涉及一种基于comsol-simulink联合仿真的电磁阻力控制方法。
背景技术:
1、相较于接触式阻尼器,电磁阻尼器具有非接触、工作可靠、结构简单的优势,在桥梁减振、车辆制动、高楼抗风抗震等领域获得了广泛的应用。从动力源上区分,电磁阻尼器可分为永磁式、电励磁与混合励磁三类,混合励磁式电磁阻尼器在断电情况下仍然能具备一定工作能力,同时正常工作过程中可通过电流对阻力进行控制,兼顾其他两类的优势,具有广阔的应用前景。
2、针对电磁阻尼器的控制问题,arunesh等开发了模糊逻辑控制器,该控制器可以根据电磁阻尼器需要的制动能量自动改变激励电流大小;he等针对涡流电液混合制动系统,基于labview和matlab设计了一个模糊控制器,并对涡流电液混合制动系统的性能进行了验证与分析;jin等建立了混合励磁线性涡流制动器的解析模型,通过解析模型计算出目标制动力,将目标制动力与实际制动力之间的误差作为pi控制的输入信号,从而对混合励磁线性涡流制动器进行控制。众所周知,想要得到较好的控制效果,必要的前提是需要有可靠的模型基础,然而目前报道出来的成果大多以真实物理模型抽象出的动力学方程和解析模型作为控制对象,与真实情况存在较大误差,造成控制效果不佳。
技术实现思路
1、本发明的目的在于提供一种基于comsol-simulink联合仿真的电磁阻力控制方法,为电磁阻尼器的控制器设计和参数选取提供相应的理论依据。
2、实现本发明目的的技术方案为:一种基于comsol-simulink联合仿真的电磁阻力控制方法,包括如下步骤:
3、步骤1、在comsolac/dc模块中搭建阻尼器的数值模型,计算获得混合励磁式电磁阻尼器初次级相对运动时的磁场分布与阻力数据;
4、步骤2、在simulink中通过s-functions进行模糊pid控制算法编译,将阻尼器的数值模型嵌入模糊pid控制模型中进行comsol-simulink联合仿真,由模糊pid控制模型为线圈绕组提供缓冲要求的励磁电流大小,阻尼器的数值模型为模糊pid控制模型提供缓冲速度、缓冲加速度、缓冲位移,进行实时数据传递与阻力控制;
5、步骤3、确定pid控制参数的初始取值范围,采用最优拉丁超立方生成样本点,经由comsol-simulink联合仿真获得不同控制参数下的阻力曲线,选定阻力峰值与谷值之差最小为优化目标,进行pid控制参数优化。
6、进一步的,步骤1中,在comsolac/dc模块中搭建阻尼器的数值模型,计算获得混合励磁式电磁阻尼器初次级相对运动时的磁场分布与阻力数据,其中:
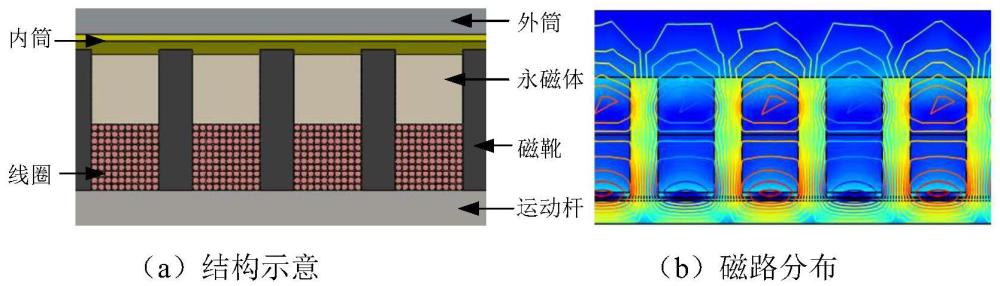
7、混合励磁式电磁阻尼器的初级由运动杆、线圈绕组、永磁体与磁靴组成,次级由内外复合筒组成,其中初级的运动杆带动永磁体与线圈运动,次级的复合筒固定,永磁体与线圈共同产生的初始磁场被导磁外筒回收,提高磁场利用率,同时,初次级产生运动的过程中,次级导电内筒上形成电磁,根据楞次定律,电磁的方向与源磁场方向相反,具有阻碍相对运动的趋势,从而产生电磁阻尼力;
8、线圈绕组产生的磁感线回路为运动杆—磁靴—气隙—内筒—外筒—内筒—气隙—磁靴—运动杆的主回路与运动杆—磁靴—线圈绕组—磁靴—运动杆的次回路,永磁体产生的磁感线回路为永磁体—磁靴—气隙—内筒—外筒—内筒—气隙—磁靴—永磁体,线圈与永磁体产生的磁场在磁靴端部汇聚;
9、据此,在comsol软件ac/dc模块建立混合励磁式电磁阻尼器的数值计算模型。
10、进一步的,步骤2中,在simulink中通过s-functions进行模糊pid控制算法编译,将阻尼器的数值模型嵌入模糊pid控制模型中进行comsol-simulink联合仿真,模糊pid控制模型为线圈绕组提供缓冲要求的励磁电流大小,阻尼器的数值模型为模糊pid控制模型提供缓冲速度、缓冲加速度、缓冲位移,进行实时数据传递与阻力控制,具体为:
11、由阻尼器的数值模型计算缓冲速度与缓冲加速度作为模糊pid控制模型的输入条件,通过模糊pid控制模型进行电流大小计算,根据电流误差e及其变化率ec输出kp、ki、kd的校正量δkp、δki、δkd,在缓冲速度与缓冲加速度同时为零后,获得电磁阻尼力的计算结果,其中:e、ec、δkp、δki、δkd的模糊子集为:{nb,nm,ns,zo,ps,pm,pb},分别表示{负大,负中,负小,零,正小,正中,正大},具体对应关系如表1~3所示;
12、表1δkp的模糊控制表
13、
14、表2δki的模糊控制表
15、
16、表3δkd的模糊控制表
17、
18、进一步的,步骤3,确定pid控制参数的初始取值范围,采用最优拉丁超立方生成样本点,经由comsol-simulink联合仿真获得不同控制参数下的阻力曲线,选定阻力峰值与谷值之差最小为优化目标,进行pid控制参数优化,其中pid控制参数的初始取值范围如表4所示;
19、表4待优化参数取值范围
20、
21、一种基于comsol-simulink联合仿真的电磁阻力控制系统,实施所述的基于comsol-simulink联合仿真的电磁阻力控制方法,实现基于comsol-simulink联合仿真的电磁阻力控制。
22、一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时,实施所述的基于comsol-simulink联合仿真的电磁阻力控制方法,实现基于comsol-simulink联合仿真的电磁阻力控制。
23、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,实施所述的基于comsol-simulink联合仿真的电磁阻力控制方法,实现基于comsol-simulink联合仿真的电磁阻力控制。
24、本发明与现有技术相比,其显著优点为:(1)将comsol电磁阻力数值计算模型与simulink控制模型进行联合仿真,实现实时数据传递,计算流程更符合真实物理过程;(2)通过对控制模型参数的进一步优化,阻力稳定性得到有效提升,工程价值更强。
技术特征:1.一种基于comsol-simulink联合仿真的电磁阻力控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于comsol-simulink联合仿真的电磁阻力控制方法,其特征在于,步骤1中,在comsolac/dc模块中搭建阻尼器的数值模型,计算获得混合励磁式电磁阻尼器初次级相对运动时的磁场分布与阻力数据,其中:
3.根据权利要求1所述的一种基于comsol-simulink联合仿真的电磁阻力控制方法,其特征在于,步骤2中,在simulink中通过s-functions进行模糊pid控制算法编译,将阻尼器的数值模型嵌入模糊pid控制模型中进行comsol-simulink联合仿真,模糊pid控制模型为线圈绕组提供缓冲要求的励磁电流大小,阻尼器的数值模型为模糊pid控制模型提供缓冲速度、缓冲加速度、缓冲位移,进行实时数据传递与阻力控制,具体为:
4.根据权利要求1所述的一种基于comsol-simulink联合仿真的电磁阻力控制方法,其特征在于,步骤3,确定pid控制参数的初始取值范围,采用最优拉丁超立方生成样本点,经由comsol-simulink联合仿真获得不同控制参数下的阻力曲线,选定阻力峰值与谷值之差最小为优化目标,进行pid控制参数优化,其中pid控制参数的初始取值范围如表4所示;
5.一种基于comsol-simulink联合仿真的电磁阻力控制系统,其特征在于,实施权利要求1-4任一项所述的基于comsol-simulink联合仿真的电磁阻力控制方法,实现基于comsol-simulink联合仿真的电磁阻力控制。
6.一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时,实施权利要求1-4任一项所述的基于comsol-simulink联合仿真的电磁阻力控制方法,实现基于comsol-simulink联合仿真的电磁阻力控制。
7.一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,实施权利要求1-4任一项所述的基于comsol-simulink联合仿真的电磁阻力控制方法,实现基于comsol-simulink联合仿真的电磁阻力控制。
技术总结本发明公开了一种基于COMSOL‑Simulink联合仿真的电磁阻力控制方法,首先根据混合励磁式电磁阻尼器产生阻力的物理过程,在COMSOL中开展建模与数值计算,分析绕组电流变化对阻力幅值的影响规律;然后在Simulink中采用S‑functions进行模糊PID控制算法编译,并基于结构模块实现COMSOL与Simulink的动态实时数据传递,对电磁力进行控制;最后优化控制参数降低阻力波动,提升阻力平稳性。本发明开展混合励磁式电磁阻尼器COMSOL‑Simulink的联合仿真进行阻力实时控制,调整控制参数提升混合励磁式电磁阻尼器在工作过程中的阻力平稳性,可为混合励磁式电磁阻尼器的工程化应用以及控制参数选取提供理论依据。技术研发人员:李雷,杨国来受保护的技术使用者:南京理工大学技术研发日:技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240730/198700.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表