一种无缝针织内衣机的自适应控制系统及其方法与流程
- 国知局
- 2024-07-31 23:49:29
本公开涉及无缝针织内衣机领域,具体涉及一种无缝针织内衣机的自适应控制系统及其方法。
背景技术:
1、随着现代工业自动化的不断进步,纺织行业尤其是内衣制造业对生产效率和产品质量的要求越来越高。例如,无缝内衣因其穿着舒适和外观美观而越来越受到消费者的青睐。在内衣生产过程中,编织速度的控制对于保证产品的质量、提高生产效率以及降低能耗具有重要意义。
2、传统的自适应控制方法往往依赖于固定的参数设置,缺乏对生产过程中各种复杂因素的动态适应能力,导致难以适应不同材料特性和生产条件的变化,这在一定程度上限制了生产效率和产品质量的提升。因此,期待一种优化的无缝针织内衣机的自适应控制系统及其方法。
技术实现思路
1、考虑到以上问题而做出了本公开。本公开的一个目的是提供一种无缝针织内衣机的自适应控制系统及其方法。
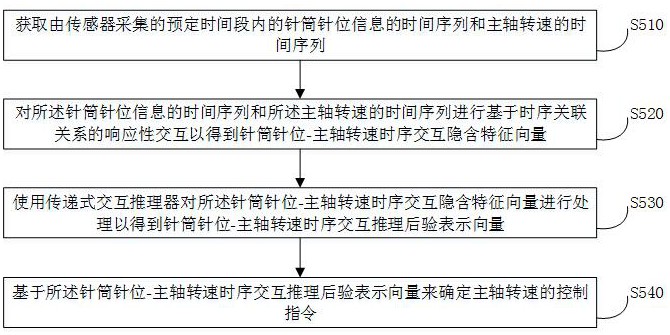
2、本公开的实施例提供了一种无缝针织内衣机的自适应控制方法,其包括:获取由传感器采集的预定时间段内的针筒针位信息的时间序列和主轴转速的时间序列;对所述针筒针位信息的时间序列和所述主轴转速的时间序列进行基于时序关联关系的响应性交互以得到针筒针位-主轴转速时序交互隐含特征向量;使用传递式交互推理器对所述针筒针位-主轴转速时序交互隐含特征向量进行处理以得到针筒针位-主轴转速时序交互推理后验表示向量;以及基于所述针筒针位-主轴转速时序交互推理后验表示向量来确定主轴转速的控制指令。
3、例如,根据本公开的实施例的无缝针织内衣机的自适应控制方法,其中,对所述针筒针位信息的时间序列和所述主轴转速的时间序列进行基于时序关联关系的响应性交互以得到针筒针位-主轴转速时序交互隐含特征向量,包括:将所述针筒针位信息的时间序列和所述主轴转速的时间序列通过基于双向长短期记忆神经网络模型的序列编码器以得到针筒针位时序关联隐含特征向量和主轴转速时序关联隐含特征向量;以及将所述针筒针位时序关联隐含特征向量和所述主轴转速时序关联隐含特征向量通过逐位置响应交互模块以得到所述针筒针位-主轴转速时序交互隐含特征向量。
4、例如,根据本公开的实施例的无缝针织内衣机的自适应控制方法,其中,将所述针筒针位时序关联隐含特征向量和所述主轴转速时序关联隐含特征向量通过逐位置响应交互模块以得到所述针筒针位-主轴转速时序交互隐含特征向量,包括:计算所述针筒针位时序关联隐含特征向量和所述主轴转速时序关联隐含特征向量的按位置相除以得到针筒针位-主轴转速时序关联融合向量;基于所述针筒针位-主轴转速时序关联融合向量构造第一针筒针位-主轴转速非线性响应因子与第二针筒针位-主轴转速非线性响应因子;以及将所述第一针筒针位-主轴转速非线性响应因子除以所述第二针筒针位-主轴转速非线性响应因子以得到所述针筒针位-主轴转速时序交互隐含特征向量。
5、例如,根据本公开的实施例的无缝针织内衣机的自适应控制方法,其中,基于所述针筒针位-主轴转速时序关联融合向量构造第一针筒针位-主轴转速非线性响应因子与第二针筒针位-主轴转速非线性响应因子,包括:计算所述针筒针位-主轴转速时序关联融合向量的二次项与其一次项的加权和以得到所述第一针筒针位-主轴转速非线性响应因子;以及计算所述针筒针位-主轴转速时序关联融合向量的二次项、所述针筒针位-主轴转速时序关联融合向量的一次项与一的加权和以得到所述第二针筒针位-主轴转速非线性响应因子。
6、例如,根据本公开的实施例的无缝针织内衣机的自适应控制方法,其中,使用传递式交互推理器对所述针筒针位-主轴转速时序交互隐含特征向量进行处理以得到针筒针位-主轴转速时序交互推理后验表示向量,包括:对所述针筒针位-主轴转速时序交互隐含特征向量进行特征集合拆分以得到针筒针位-主轴转速局部时序交互隐含特征向量的序列;以及将所述针筒针位-主轴转速局部时序交互隐含特征向量的序列通过消息传递聚合网络以得到所述针筒针位-主轴转速时序交互推理后验表示向量。
7、例如,根据本公开的实施例的无缝针织内衣机的自适应控制方法,其中,将所述针筒针位-主轴转速局部时序交互隐含特征向量的序列通过消息传递聚合网络以得到所述针筒针位-主轴转速时序交互推理后验表示向量,包括:计算所述针筒针位-主轴转速局部时序交互隐含特征向量的序列的按位置加和以得到针筒针位-主轴转速时序交互聚合特征向量;保留所述针筒针位-主轴转速局部时序交互隐含特征向量的序列中最后一个针筒针位-主轴转速局部时序交互隐含特征向量的针筒针位-主轴转速局部交互特征信息以得到最大相关度显化针筒针位-主轴转速局部时序交互隐含特征向量;以及将所述针筒针位-主轴转速时序交互聚合特征向量和所述最大相关度显化针筒针位-主轴转速局部时序交互隐含特征向量进行推断式后验拟合以得到所述针筒针位-主轴转速时序交互推理后验表示向量。
8、例如,根据本公开的实施例的无缝针织内衣机的自适应控制方法,其中,保留所述针筒针位-主轴转速局部时序交互隐含特征向量的序列中最后一个针筒针位-主轴转速局部时序交互隐含特征向量的针筒针位-主轴转速局部交互特征信息以得到最大相关度显化针筒针位-主轴转速局部时序交互隐含特征向量,包括:基于可学习的标量参数构造最大相关度保留权重;以及将所述最大相关度保留权重与所述针筒针位-主轴转速局部时序交互隐含特征向量的序列中最后一个针筒针位-主轴转速局部时序交互隐含特征向量进行点乘以得到所述最大相关度显化针筒针位-主轴转速局部时序交互隐含特征向量。
9、例如,根据本公开的实施例的无缝针织内衣机的自适应控制方法,其中,将所述针筒针位-主轴转速时序交互聚合特征向量和所述最大相关度显化针筒针位-主轴转速局部时序交互隐含特征向量进行推断式后验拟合以得到所述针筒针位-主轴转速时序交互推理后验表示向量,包括:将所述针筒针位-主轴转速时序交互聚合特征向量和所述最大相关度显化针筒针位-主轴转速局部时序交互隐含特征向量进行按位置加点后,通过多层感知机进行后验拟合以得到所述针筒针位-主轴转速时序交互推理后验表示向量,其中,所述多层感知机由全连接层构成。
10、例如,根据本公开的实施例的无缝针织内衣机的自适应控制方法,其中,基于所述针筒针位-主轴转速时序交互推理后验表示向量来确定主轴转速的控制指令,包括:将所述针筒针位-主轴转速时序交互推理后验表示向量通过基于分类器的控制器以得到所述控制指令,所述控制指令用于表示当前时间点的主轴转速应增大、应减小或应保持不变。
11、本公开的实施例还提供了一种无缝针织内衣机的自适应控制系统,其包括:数据采集模块,用于获取由传感器采集的预定时间段内的针筒针位信息的时间序列和主轴转速的时间序列;响应交互模块,用于对所述针筒针位信息的时间序列和所述主轴转速的时间序列进行基于时序关联关系的响应性交互以得到针筒针位-主轴转速时序交互隐含特征向量;交互推理模块,用于使用传递式交互推理器对所述针筒针位-主轴转速时序交互隐含特征向量进行处理以得到针筒针位-主轴转速时序交互推理后验表示向量;以及转速控制模块,用于基于所述针筒针位-主轴转速时序交互推理后验表示向量来确定主轴转速的控制指令。
12、根据本公开的实施例的无缝针织内衣机的自适应控制系统及其方法,其利用传感器来实时采集针筒针位信息和主轴转速数据,并结合深度学习算法对两者进行响应性关联分析,挖掘针筒针位与主轴转速间的内在时序联系,理解内衣编织密度均匀性的波动模式,并把握编织过程的动态特性,从而实现对主轴转速的智能化控制。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198692.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。