一种基于神经网络的无人机超声避障装置及方法
- 国知局
- 2024-07-31 23:49:20
本发明属于电子通信,具体涉及一种基于神经网络的无人机超声避障装置及方法。
背景技术:
1、无人机,又称无人驾驶飞行器(unmanned aerial vehicle,简称uav),是一种不需要载人驾驶,可以由地面或空中的遥控器或自主程序控制的飞行器。作为一种新兴的航空器,具有广泛的应用前景,如农业喷洒、环境监测、救援救灾、物流运输等。然而,无人机的安全飞行是一个亟待解决的问题,尤其是在复杂的环境中,如城市、森林、山洞等。无人机需要能够及时地感知和避开周围的障碍物,以防止发生碰撞或坠落的事故。目前,大部分无人机由于自身功耗高的问题导致续航时间短,一般在10到30分钟,并且避障技术依赖于摄像头和图像处理,这种方法存在很明显的痛点,如功耗高、无法应对突发情况、存在盲区等问题。因此,研究一种更加高效、低功耗、适应性好的无人机避障技术是非常有必要的。
技术实现思路
1、为了解决相关技术中存在的上述问题,本发明提供了一种基于神经网络的无人机超声避障装置及方法。本发明要解决的技术问题通过以下技术方案实现:
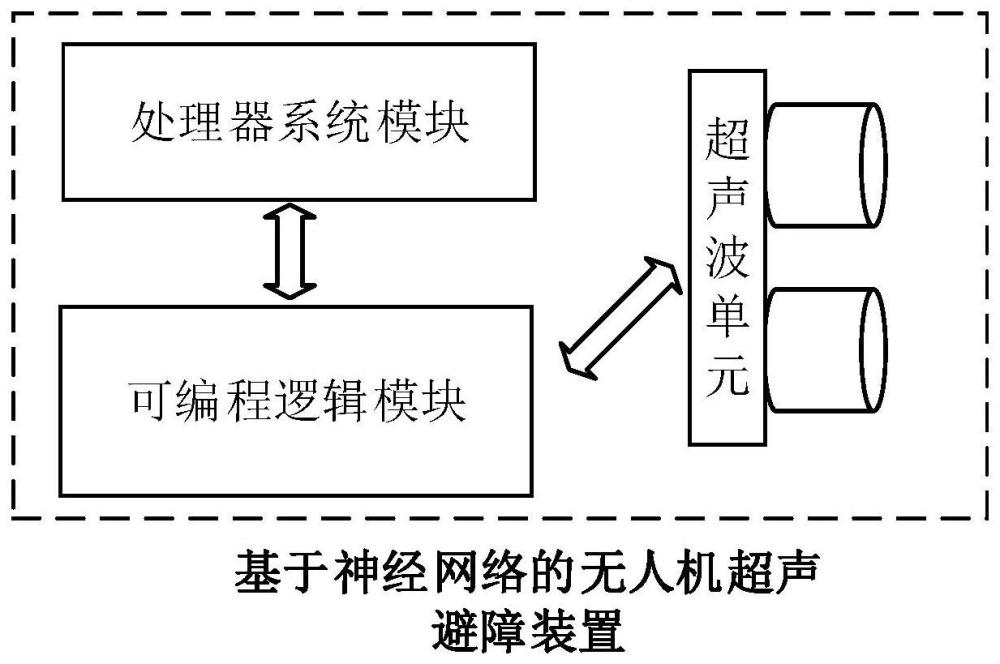
2、第一方面,本发明提供一种基于神经网络的无人机超声避障装置,包括:所述装置包括:可编程逻辑模块、处理器系统模块、超声波模块;
3、所述超声波模块,用于响应于周期性触发信号发射周期性超声波,以及接收超声回波,并将所述超声回波传递给所述可编程逻辑模块;所述可编程逻辑模块,用于产生所述周期性触发信号,并将所述周期性触发信号发送给所述超声波模块,接收所述超声波模块传递的所述超声回波,并对所述超声回波进行计数,以读取所述超声回波的周期数,以及利用所述超声回波的周期数和预先训练好的神经网络,计算获得识别结果,所述识别结果用于表征控制指令;所述处理器系统模块,用于获取所述识别结果,以及根据所述识别结果,执行无人机的姿态更新;所述可编程逻辑模块、所述处理器系统模块和所述超声波模块之间电连接。
4、在一些实施例中,所述可编程逻辑模块包括:超声驱动模块和硬件级神经网络模块;所述超声驱动模块,用于产生所述周期性触发信号,并将所述周期性触发信号发送给所述超声波模块,接收所述超声波模块传递的所述超声回波,并对所述超声回波进行计数,以读取所述超声回波的周期数;所述硬件级神经网络模块,用于获取所述超声回波的周期数,并利用所述预先训练好的神经网络,对所述超声回波的周期数进行运算处理,确定所述识别结果;所述超声驱动模块与所述硬件级神经网络模块之间电连接,以及所述超声驱动模块与所述超声波模块电连接,所述硬件级神经网络模块与所述处理器系统模块之间电连接。
5、在一些实施例中,所述超声驱动模块和所述硬件级神经网络模块均接入预设时钟信号和复位信号;所述超声驱动模块包括:分频微秒模块、超声触发模块和超声回响模块;所述分频微秒模块的输入端和所述超声回响模块的输入端均接入所述预设时钟信号和所述复位信号,所述超声触发模块的输入端接入所述复位信号;所述分频微秒模块的输出端分别与所述超声触发模块的输入端、所述超声回波模块的输入端连接,所述超声触发模块的输出端与所述超声波模块的输入端连接,所述超声回波模块的输入端还与所述超声波模块的输出端连接;所述超声回波模块的输出端与所述硬件级神经网络模块的输入端连接;所述分频微秒模块,用于利用所述复位信号,对所述预设时钟信号进行分频,生成周期时钟信号,并将所述周期时钟信号分别发送给所述超声触发模块和所述超声回波模块;所述超声触发模块,用于基于所述分频微秒模块发送的周期时钟信号、所述预设时钟信号和所述复位信号,产生所述周期性触发信号;所述超声回波模块,用于接收所述超声回波,并基于所述分频微秒模块发送的周期时钟信号、所述预设时钟信号和所述复位信号,对所述超声回波进行计数,以读取所述超声回波的周期数。
6、在一些实施例中,所述超声驱动模块和所述硬件级神经网络模块均接入预设时钟信号和复位信号;所述超声驱动模块包括:超声回波模块;所述硬件级神经网络模块包括:归一化模块、控制模块、隐藏层模块、存储单元和输出层模块;所述归一化模块的输入端、所述控制模块的输入端和所述输出层模块的输入端均接入所述预设时钟信号、所述复位信号;所述归一化模块的输入端还与所述超声回波模块的输出端连接,所述归一化模块的输出端、所述控制模块的输出端均与所述隐藏层模块的输入端连接,所述隐藏层模块的输出端分别与所述存储单元的输入端、所述输出层模块的输入端连接,所述输出层模块的输出端与所述处理器系统模块的输入端连接;所述归一化模块,用于对于所述超声回波的周期数进行归一化处理,得到归一化处理后的周期数,并将所述归一化处理后的周期数发送给所述隐藏层模块;所述隐藏层模块,包括所述预先训练好的神经网络,用于利用第一权重,对输入的所述归一化处理后的周期数进行相乘处理,获得第一输出;利用第一偏置,对所述第一输出进行加法处理,获得第二输出;使用所述预先训练好的神经网络的激活函数,对所述第二输出进行运算,获得第三输出;并利用第二权重,对所述第三输出进行相乘处理,获得第四输出;以及利用第二偏置,对所述第四输出进行相加处理,获得第五输出;使用所述激活函数,对所述第五输出进行运算,获得所述识别结果;其中,所述第一权重是指所述预先训练好的神经网络中输入层与隐藏层之间的权重,所述第二权重是指所述隐藏层与所述预先训练好的神经网络中的输出层之间的权重,所述第一偏置是指所述输入层与所述隐藏层之间的偏置,所述第二偏置是指所述隐藏层与所述输出层之间的偏置;所述输出层模块,用于获取所述识别结果,并将所述识别结果发送给所述处理器系统模块;所述存储单元,用于存储所述第一权重、所述第一偏置、所述第二权重以及所述第二偏置;所述控制模块,用于片选所述隐藏层模块和所述存储单元。
7、在一些实施例中,所述装置还包括:数据通信模块;所述处理器系统模块包括:处理器、存储模块和飞控驱动模块;所述处理器分别与所述存储模块、所述飞控驱动模块电连接,并且所述硬件级神经网络模块的输出端与所述数据通信模块的输入端连接,所述数据通信模块的输出端与所述处理器的输入端连接;所述处理器,用于接收所述识别结果,并根据所述识别结果向所述飞控驱动模块输出控制指令;所述存储模块,用于获取所述超声回波的周期数和所述超声回波的周期数一一对应的识别结果,以生成训练数据集;所述飞控驱动模块,用于根据所述控制指令执行所述无人机的姿态更新。
8、在一些实施例中,所述超声波模块至少包括第一超声波单元和第二超声波单元,所述第一超声波单元和所述第二超声波单元均包括接收单元和发射单元,所述接收单元用于接收所述超声回波,所述发射单元用于响应于所述周期性触发信号发射所述周期性超声波。
9、第二方面,本发明提供了一种基于神经网络的无人机超声避障方法,所述方法应用于上述第一方面中描述的装置,所述方法包括:接收超声回波;利用所述超声回波,确定所述超声回波的周期数;将所述超声回波的周期数输入预先训练好的神经网络中,输出识别结果,所述识别结果用于表征控制指令;基于所述识别结果,执行无人机的姿态更新。
10、在一些实施例中,所述将所述超声回波的周期数输入预先训练好的神经网络中,输出识别结果,包括:对所述超声回波的周期数进行归一化处理,获得归一化处理后的周期数;利用第一权重,对输入的所述归一化处理后的周期数进行相乘处理,获得第一输出,所述第一权重是指所述预先训练好的神经网络中输入层与隐藏层之间的权重;利用第一偏置,对所述第一输出进行加法处理,获得第二输出,所述第一偏置是指所述输入层与所述隐藏层之间的偏置;使用所述预先训练好的神经网络的激活函数,对所述第二输出进行运算,获得第三输出;利用第二权重,对所述第三输出进行相乘处理,获得第四输出,所述第二权重是指所述隐藏层与所述预先训练好的神经网络中的输出层之间的权重;利用第二偏置,对所述第四输出进行相加处理,获得第五输出,所述第二偏置是指所述隐藏层与所述输出层之间的偏置;使用所述激活函数,对所述第五输出进行运算,获得所述识别结果。
11、在一些实施例中,所述预先训练好的神经网络采用以下方法训练获得:获取训练数据集以及对应的标签,其中,所述训练数据集中的一条数据对应一个标签,所述标签是指所述识别结果;分别对所述训练数据集以及对应的标签进行归一化处理,获得第一数据集以及第一类标签,所述第一数据集中的数据与所述训练数据集中的数据一一对应,所述第一类标签包括多个第一标签,所述多个第一标签与所述训练数据集对应的标签一一对应;将第i条第一数据,输入所述神经网络中,确定所述第i条第一数据对应的第一结果,i的取值为1,2,…n,n为所述第一数据集中的第一数据的总数;利用损失函数、所述第i条第一数据对应的第一结果,以及所述第i条第一数据对应的第一标签,确定第i条损失值;根据所述第i个损失值,调整所述神经网络的第一权重、第一偏置、第二权重和第二偏置,直至获得满足预设条件的所述第一权重、所述第一偏置、所述第二权重和所述第二偏置,得到所述预先训练好的神经网络。
12、在一些实施例中,所述方法还包括:获取并存储所述第一权重、所述第一偏置、所述第二权重和所述第二偏置。
13、本发明具有如下有益技术效果:
14、(1)采用超声波技术实现避障(mw级),相比传统的摄像头图像处理技术(10w功耗),能进一步地降低无人机工作功耗,有效地提高无人机续航。
15、(2)使用神经网络和超声波检测组合的方式,有效地提高了超声技术的鲁棒性,解决了目前超声技术自适应性差的痛点;同时可以完美克服鸟类的无意或故意撞击的问题,灵活应对突发情况,避免伤害动物与无人机的损失。
16、(3)可在无人机上部署了2、4、6、8个超声波单元,有效地解决了图像处理在不同场景应用下存在检测盲区的问题。
17、(4)采用高速样本收集系统进行训练数据采集,可实现实时、无距离限制的样本存储。
18、(5)预先训练好的神经网络中各神经元的权重和偏置可以根据特种环境和飞行速度进行更换、优化,相比一般超声避障系统,有效地提高了适应性、准确性。
19、(6)可编程逻辑模块可以直接接入商用无人机预留的扩展接口中,从而低成本地升级系统配件,降低功耗。
20、以下将结合附图及实施例对本发明做进一步详细说明。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198682.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表