一种履带式收割机变姿态底盘调节轨迹规划方法及系统
- 国知局
- 2024-07-31 23:49:14
本发明属于智能农业装备,尤其涉及一种履带式收割机变姿态底盘调节轨迹规划方法及系统。
背景技术:
1、履带式联合收割机因具有良好的通过性和收获适应性,已成为我国稻麦油等作物收获的主流机型。
2、底盘是联合收割机的“行走系统”,是影响整机作业性能与效率的核心部件。目前,履带式联合收割机采用“行走装置-底盘机架”一体式焊接结构,具有结构强度好的优点,但无法根据实际工况调节车身姿态,影响整机的操纵和通过性。例如,南方水田深泥脚导致底盘机架托底,无法通过自身动力脱困;越埂过坑或上下装车时,车体倾角变化过大,容易发生倾翻等。为了解决上述问题,需要对履带式联合收割机的底盘进行变姿态调节。
3、履带式联合收获机变姿态底盘研发已经取得了丰硕的成果,但仍存在如下问题需要解决:缺乏底盘调节轨迹优化方法,履带长度变化幅度大,容易损伤或脱落。在底盘调节过程中,轮系构型会发生变化,导致履带长度发生改变,履带过于张紧会导致内部应力增大发生损伤甚至破坏,过于松弛会导致履带脱落,影响作业。
技术实现思路
1、针对上述技术问题,本发明的一个方式的目的之一是提出一种履带式收割机变姿态底盘调节轨迹规划方法及系统,旨在根据底盘姿态调整目标,规划出合理的姿态调节轨迹,即液压缸伸缩量,使得履带长度变化最小,使得履带不容易损伤、脱落。
2、注意,这些目的的记载并不妨碍其他目的的存在。本发明的一个方式并不需要实现所有上述目的。可以从说明书、附图、权利要求书的记载中抽取上述目的以外的目的。
3、本发明是通过以下技术手段实现上述技术目的。
4、一种履带式收割机变姿态底盘调节轨迹规划方法,包括以下步骤:
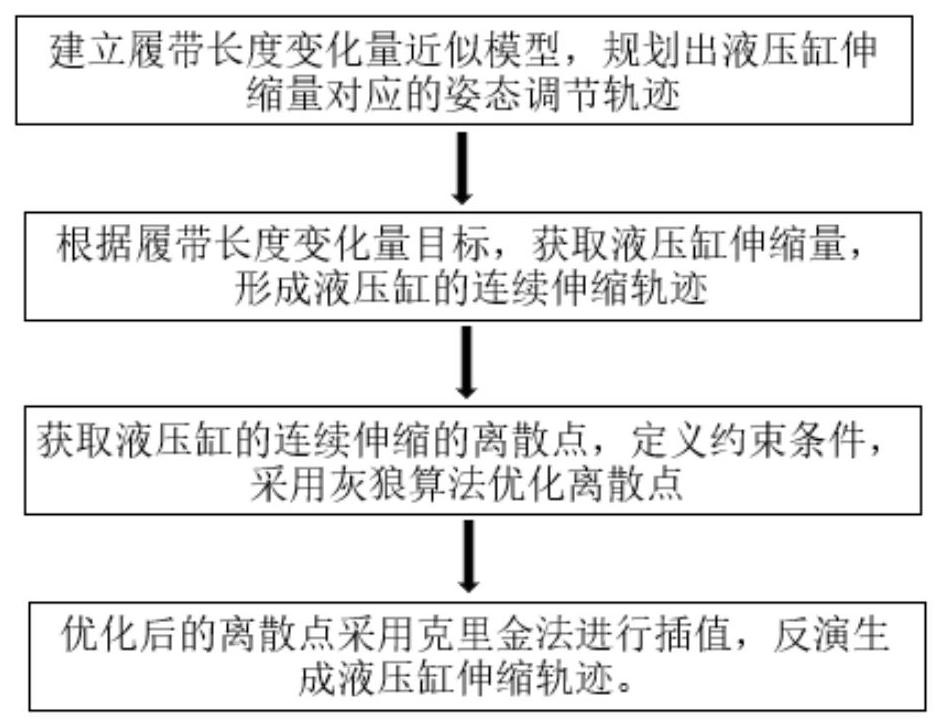
5、步骤s1:根据底盘姿态调整目标,规划出液压缸伸缩量对应的姿态调节轨迹,使得履带长度变化最小,采集履带调节过程中,液压缸伸缩量和履带变化量,建立履带长度变化量近似模型;
6、步骤s2:根据履带长度变化量目标,获取液压缸伸缩量,形成液压缸的连续伸缩轨迹;
7、步骤s3:根据步骤s2所述的液压缸的连续伸缩轨迹,获取液压缸的连续伸缩的离散点,定义约束条件,采用灰狼算法优化离散点;
8、步骤s4:对步骤s3所述的优化后的离散点采用克里金法进行插值,反演生成液压缸伸缩轨迹。
9、上述方案中,所述步骤s1中规划出液压缸伸缩量对应的姿态调节轨迹,使得履带长度变化最小,采用的公式如下:
10、find(g1,g2…,gk-1,gk)
11、min.(lc)
12、
13、其中,find()表示求解最优解的函数;
14、min.()表示最小值;
15、gk=[gk,1,gk,2,…,gk,i,…,gk,m]为第k个液压缸伸缩位移组成的向量;
16、gk,t为第k个液压缸在t时刻的伸缩位移;
17、gk,min为第k个液压缸最小伸缩位移;
18、gk,max为第k个液压缸最大伸缩位移;
19、lc调节过程中履带变化量。
20、上述方案中,所述步骤s1中建立履带长度变化量近似模型具体包括以下步骤:
21、步骤s1.1:采用随机抽样生成多个液压缸伸缩位移样本,并做均一化处理;
22、步骤s1.2:针对步骤s1.1所述的每个液压缸伸缩位移样本,通过仿真计算出对应的履带长度;
23、步骤s1.3:基于液压缸伸缩位移样本和对应的履带长度,采用多元回归方法建立履带长度变化量近似模型,并通过损失函数进行训练优化。
24、进一步的,所述步骤s1.3中履带长度变化量近似模型的公式如下:
25、
26、其中,l为输出响应组成的向量,即履带长度;
27、a0、ai、aii、aij为多项式系数;
28、gi表示第i个gk,gk=[gk,1,gk,2,…,gk,m]为第k个液压缸伸缩位移组成的向量;
29、gj表示第j个gk,gk=[gk,1,gk,2,…,gk,m]为第k个液压缸伸缩位移组成的向量。
30、进一步的,所述步骤s1.3中损失函数公式如下:
31、‖l-ga‖2=(l-ga)t(l-ga)=ltl-ltga-atgtl+atgtga
32、其中,l为输出响应组成的向量,即履带长度;
33、g为样本带入后的表达式;
34、a为多项式系数a0、ai、aii、aij组成的向量;
35、t表示转置运算。
36、上述方案中,所述步骤s3中约束条件如下:
37、
38、其中,gk,初始表示第k个液压缸的初始伸缩量;
39、gk,n表示第k个液压缸的第n个离散点;
40、gk,目标表示第k个液压缸的目标伸缩量;
41、m表示离散点总计数量。
42、上述方案中,所述步骤s4中克里金法进行插值的具体步骤包括:
43、步骤s4.1:根据输入x和输出g及其输入输出的关系条件构建基函数矩阵f;
44、步骤s4.2:构建输入量表达式;
45、步骤s4.3:构建待预测样本xnew的输出估计值和预测误差;
46、步骤s4.4:计算回归均方差
47、步骤s4.5:建立优化问题求解模型的最优参数,根据最优参数优化后的克里金法模型进行插值。
48、进一步的,所述步骤s4.1中输入x和输出g的关系条件公式如下:
49、
50、其中,g为输出,即液压缸伸长量;
51、x为输入,即归一化后的调节时序;
52、fj(x)为第j个基函数;
53、βj为第j个基函数的系数;
54、p为基函数的个数;
55、z(x)为高斯过程,满足以下公式:
56、e(z(x))=0
57、e(z(xi)z(xj))=σ2r(θ,xi,xj)
58、其中,e(·)表示变量的期望;
59、σ2为样本方差;
60、r(θ,xi,xj)为相关矩阵;
61、θ为相关矩阵的参数向量;
62、xi是第i个数据的输入向量;
63、xj是第j个数据的输入向量。
64、进一步的,所述步骤s4.5中最优参数优化后的克里金法模型公式如下:
65、
66、其中,为新样本xnew的输出预测值;
67、f(xnew)表示xnew通过基函数得到的数值所组成的向量;
68、为通过相关矩阵获取的待预测数据与训练数据的相关向量;
69、r为相关矩阵;
70、g是训练数据输出组成的向量;
71、是基函数系数向量β的估计值,表达式为:
72、
73、其中,f为基函数矩阵,f=(f(x1),f(x2),…,f(xn))t,n是训练样本数;
74、ft是f的转置。
75、一种应用上述的履带式收割机变姿态底盘调节轨迹规划方法的系统,包括履带长度变化量近似模型模块、初始液压缸伸缩轨迹生成模块、灰狼算法模块和克里金法插值模块;
76、所述履带长度变化量近似模型模块用于根据底盘姿态调整目标,规划出液压缸伸缩量对应的姿态调节轨迹,使得履带长度变化最小,采集履带调节过程中,液压缸伸缩量和履带变化量,建立履带长度变化量近似模型;
77、所述初始液压缸伸缩轨迹生成模块用于根据履带长度变化量目标,获取液压缸伸缩量,形成液压缸的连续伸缩轨迹;
78、所述灰狼算法模块用于根据初始液压缸伸缩轨迹生成模块生成的液压缸的连续伸缩轨迹,获取液压缸的连续伸缩的离散点,定义约束条件,采用灰狼算法优化离散点;
79、所述克里金法插值模块用于对灰狼算法模块优化后的离散点采用克里金法进行插值,反演生成液压缸伸缩轨迹。
80、与现有技术相比,本发明的有益效果是:
81、根据本发明的一个方式,本发明建立了履带长度变化量近似模型,可以有效反应液压缸伸缩量与履带长度之间的关系,为后续调整履带长度提供了技术支持。
82、根据本发明的一个方式,采用灰狼算法优化液压缸的连续伸缩轨迹的离散点,可以优化液压缸伸缩量形成的轨迹,使其变化时减小负载变化,提高控制精度。
83、根据本发明的一个方式,本发明采用克里金法对优化后液压缸的连续伸缩轨迹的离散点进行反演生成轨迹,可以实现履带的液压缸伸缩量最小的底盘姿态调整。
84、注意,这些效果的记载不妨碍其他效果的存在。本发明的一个方式并不一定必须具有所有上述效果。可以从说明书、附图、权利要求书等的记载显而易见地看出并抽出上述以外的效果。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198673.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。