一种基于WPA-INC的光伏最大功率点跟踪控制方法
- 国知局
- 2024-07-31 23:49:14
本发明涉及光伏发电,尤其涉及一种基于wpa-inc(wolfpackalgorithm-incremental conductance method)的光伏最大功率点跟踪控制方法。
背景技术:
1、能源是人类赖以生存的物质,而石油煤炭等不可再生能源储量急剧减少,并且会造成严重的环境污染。太阳能作为一种清洁、可再生的能源,具有广泛的应用前景。开发利用太阳能,已成为我国能源战略的重要组成部分。在光伏发电系统中,光伏最大功率点跟踪(maximumpowerpointtracking,mppt)技术是关键环节,它能使光伏阵列在工作过程中始终输出最大功率,从而提高系统能量转换效率。
2、目前,分布式光伏发电系统被广泛应用于多种场景。光伏阵列的输出特性主要受环境温度与辐照度的影响,而其通常露天摆放,易被高层建筑、云层等遮挡,使得光伏阵列所受辐照度不均匀。传统mppt技术跟踪速度慢、稳态振荡大,且在辐照度变化时易发生扰动方向误判。同时在光伏阵列局部阴影的情况下其输出功率-电压特性曲线将会由单峰曲线变成多峰曲线,使得传统mppt技术易陷于局部最优,不再适用。
3、狼群算法是一种基于狼群群体智能的寻优算法,能够以较大的概率快速找到最优解,同时其还具有并行性,可以在同一时间从多个点出发进行搜索,从而提高算法的效率。但其存在收敛精度低、算法后期易陷于局部最优等问题。同时单一智能优化算法只能将光伏系统工作点调至其理论全局最优点,仍需配合传统mppt技术加以验证并微调。
技术实现思路
1、针对上述技术问题,本发明提出一种基于wpa-inc的光伏最大功率点跟踪控制方法,提高系统跟踪最大功率点的速度与输出功率,同时消除系统稳态时的功率振荡。
2、基于wpa-inc的光伏最大功率点跟踪控制方法,包括以下步骤:
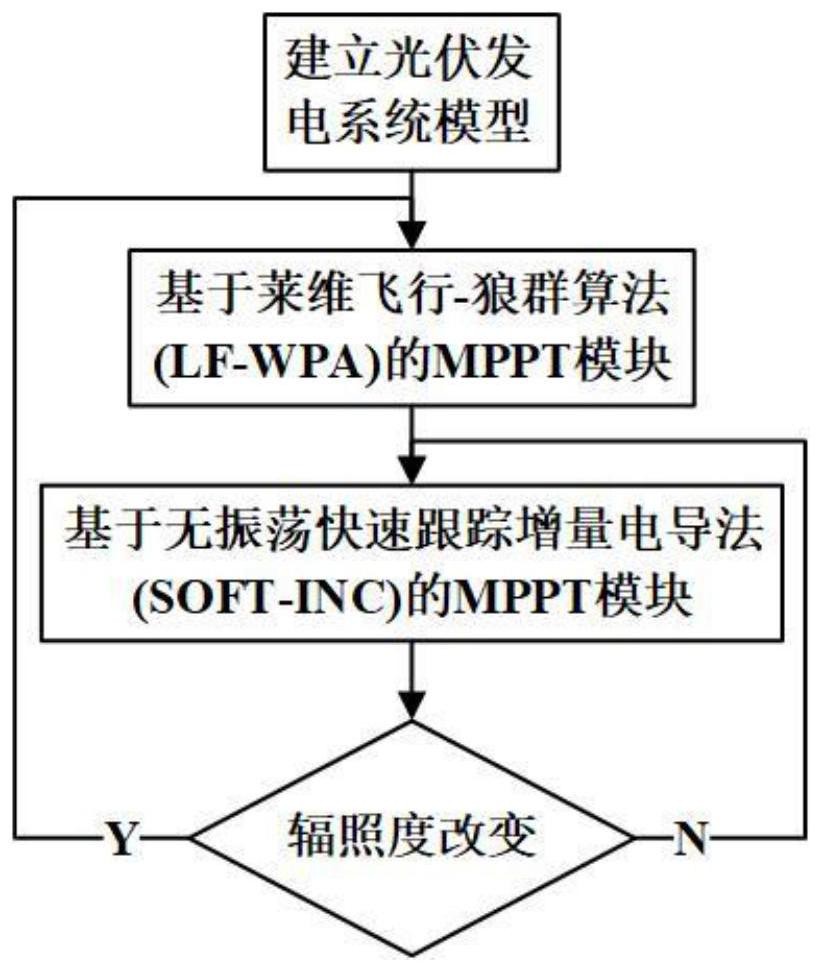
3、步骤1、占空比粗调:基于莱维飞行-狼群算法(levy flight strategy-wolfpackalgorithm,lf-wpa)的mppt模块,用于寻找多峰pv特性曲线的全局功率最高点对应的占空比,并将光伏系统的占空比调至该参考值;
4、步骤1.1、狼群初始化:
5、所述初始化步骤包括初始化人工狼的数量n及对应的初始位置xi(i=1,2,3...n),其位置表示为光伏系统转换电路开关管的驱动信号pwm波的占空比,待优化参数的个数d和占空比边界[xmin,xmax],最大迭代次数kmax,探狼比例因子α,最大游走次数tmax,距离判定因子ω以及更新比例因子β;计算人工狼群{x1,x2...xn}的目标函数值{y1,y2...yn}(即光伏输出功率),将其中输出功率最高的人工狼作为头狼xlead,对应输出功率为ylead,再选取除头狼外的snum只输出功率最优的作为探狼,snum取之间的整数,剩余的n-snum-1只狼作为猛狼,完成初始化;
6、步骤1.2、基于莱维飞行策略的探狼游走:
7、为准确寻找多峰pv特性曲线的全局功率最高点,引入莱维飞行策略增强算法的全局搜索能力,探狼根据公式(1)-(5)进行游走行为,若探狼的输出功率yi(k+1)>yi(k),则更新该人工狼的位置,否则其位置不变;重复游走行为直到某只狼对应的输出功率yi>ylead(此时将该狼更新为头狼)或达到最大游走次数tmax,转至步骤1.3;
8、
9、c=rand(size(i_position)) (2)
10、
11、
12、
13、其中,为探狼i在第k次迭代d维度中的位置,d=1,2,3…d,d为待寻优变量的个数,c为探狼i位置的随机数,为点对点乘法,levy(δ)表示随机搜索路径,δ的取值范围为1<δ<3,xibest代表历史最优狼位置,u和v的正态分布如式(4)所示,γ为[0,2]的随机数;
14、步骤1.3、自适应步长头狼召唤:
15、猛狼根据公式(5)和(6)更新位置;奔袭途中,若猛狼的输出功率yi>ylead,则将该猛狼更新为头狼并发起召唤行为;若yi<ylead,则猛狼继续奔袭,直到其与头狼间的距离lil小于lnear,转至步骤1.4;
16、step=rand×||xi-xlead||2 (5)
17、
18、
19、其中,step为猛狼突袭自适应步长,为猛狼i在第k次迭代d维度中的位置,xlead为头狼的当前位置,ω为距离判定因子,maxd、mind分别为第d个寻优变量的取值上下限;
20、步骤1.4、猛狼围攻:
21、狼群联合起来围捕猎物,根据公式(8)更新猛狼的位置;
22、
23、其中,为猛狼在第k次迭代d维度中的位置,λ为均匀分布在区间[-1,1]中的随机数,λstep为围攻行为的攻击步长,gd为猎物的位置(即当前输出功率最大的头狼位置);若实施围攻行为后人工狼的输出功率yi(k+1)>yi(k),则更新此人工狼的位置;否则,其位置不变;
24、步骤1.5、更新狼群:
25、淘汰掉输出功率最差的rnum只人工狼,同时随机生成rnum只人工狼,完成种群更新;rnum为[(n/2β),(n/β)]区间内的随机整数,β为更新比例因子;
26、步骤1.6、判断算法是否满足优化精度要求或达到最大迭代次数kmax;若满足,则输出头狼位置,并将光伏系统的占空比调至该参考值,否则转至步骤1.2。
27、步骤2、占空比细调:经过步骤1将光伏系统工作点调至全局最大输出功率点附近后,可将inc算法寻优范围限制在单峰pv特性曲线上;基于无振荡快速跟踪增量电导法(steady output and fast tracking-incremental conductance method,soft-inc)的mppt模块,用于在小范围的单峰pv特性曲线逐步寻优,以获得更高及更稳定的光伏输出功率,同时准确识别环境辐照度的变化,具体实现方法如下:
28、设光伏输出电压为v,输出电流为i,则光伏输出功率为:
29、p=v*i (9)
30、将式(9)两边对v求导,可得:
31、
32、当工作点在单峰pv特性曲线的最大功率点左侧时,有v<vmpp,当工作点在最大功率点时,有v=vmpp,当工作点在最大功率点右侧时,有v>vmpp,将其带入式(10)可得:
33、
34、根据的正负可判断出当前系统工作点相对mpp的位置,进一步确定系统占空比的扰动方向,通过不断扰动占空比达到跟踪mpp的目的;
35、在传统inc技术的基础上,提出变步长策略、辐照度变化识别及消除误判策略和消除稳态振荡策略。上述变步长策略,其特征在于,占空比大小按如下方式确定:
36、
37、d(k)=d(k-1)±s(k)δdmax (13)
38、其中,s(k)为步长调整系数,其满足0<s(k)<1,为瞬间的电阻量,为瞬间的电导增量,d(k-1)为上一周期的占空比,d(k)为当前周期的占空比,δdmax为初始设置的最大固定步长;s(k)δdmax为占空比扰动大小,其上限为δdmax,扰动下限引起的电压电流变化应大于系统开关纹波;
39、上述辐照度变化识别及消除误判策略,其特征在于,系统处于稳态时,当采样数据满足式(14),则算法将判断此时环境辐照度发生变化,再结合didv的正负性,可避免辐照度增大时占空比扰动方向误判;
40、
41、其中,p*为设置的功率阈值;
42、上述消除稳态振荡策略,其特征在于,光伏输出电压增大记为slope(i)=1,减小记为slope(i)=-1,不变记为slope(i)=0,连续记录5次占空比扰动的方向并相加:
43、
44、当满足则表明系统工作点收敛到稳态,选择这5个工作点中光伏输出功率最大的点对应的占空比作为当前环境下的最优占空比,光伏系统保持该占空比不再扰动,以获得更高及更稳定的光伏输出功率。
45、本发明的有益效果和优点是:
46、(1)提出了一种基于莱维飞行-狼群算法(lf-wpa)与无振荡快速跟踪增量电导法(soft-inc)的mppt新方法,该方法通过基于lf-wpa的mppt模块快速寻找当前辐照度环境下的最大功率点,再配合基于soft-inc的mppt模块逐步微调,实现变动环境下的最大功率点跟踪。
47、(2)设计了一种基于莱维飞行策略的狼群算法并应用于mppt,有效提升了算法收敛精度,增强了寻找全局最优点的能力。
48、(3)设计了一种基于无振荡快速跟踪增量电导法的mppt模块,准确识别辐照度的变化,有效提升了算法跟踪实际最大功率点的快速性,并且消除了系统在稳态的功率振荡,使光伏系统的输出功率更高且更稳定。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198672.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表