融合自适应斑马算法和扰动观测法的光伏跟踪控制方法
- 国知局
- 2024-07-31 23:49:34
本发明属于新能源领域,涉及一种融合自适应斑马算法和扰动观测法的光伏跟踪控制方法。
背景技术:
1、太阳能是一种取之不尽的清洁能源,太阳能的开发利用是历史的必然趋势,其中,光伏发电是太阳能利用中最重要的一种利用方式。实际应用中多采用多块光伏电池板组成光伏阵列进行发电。
2、太阳能电池的光电转换效率较低,电池发电容量有限,并且太阳能电池输出受外界环境因素影响较大,尤其在光照不均匀或存在障碍物遮挡的环境下,其输出特性是一个典型的非线性非凸函数,呈现多峰现象。如何实现快速收敛并稳定运行在输出功率最大点处,是提高光伏发电效率的研究重点和难点。
3、对于这个问题,国内外提出了一些控制方法。传统的控制方法如扰动观测法、电导增量法及其各种改进算法能有效跟踪最大功率点,但是扰动步长难以设置,且容易陷入局部最优点,使系统在不良状态下运行,损失发电量。人工智能控制方法如粒子群算法、人工神经网络算法、蚁群算法等,会降低控制系统的容错能力,降低功率输出的稳定性和动态响应能力,且容易陷入频繁的全局搜索状态,不适合实际太阳能电站的工程应用。
4、基于探索和开发两个概念的元启发式算法能够找到优化问题的合适解。探索的概念代表了算法对搜索空间进行全局搜索的能力,并对其进行扫描,以准确识别最优区域。开发的概念代表了算法局部搜索搜索空间以收敛到更好解的能力。优化算法必须在探索和开发之间取得适当的平衡,以获得适当的解决方案。
5、本发明专利提出了融合自适应斑马算法和扰动观测法的光伏跟踪控制方法,收敛速度快,振荡少,性能稳定,应用此算法的控制器发电效率有效提高。
技术实现思路
1、本发明针对已有阴影遮挡下光伏最大功率跟踪控制算法存在搜索时间较长、复杂度较高、搜索精度较差等问题,提出一种融合自适应斑马算法和扰动观测法的光伏跟踪控制方法,用于局部阴影遮挡下的光伏最大功率的高效率跟踪与控制。
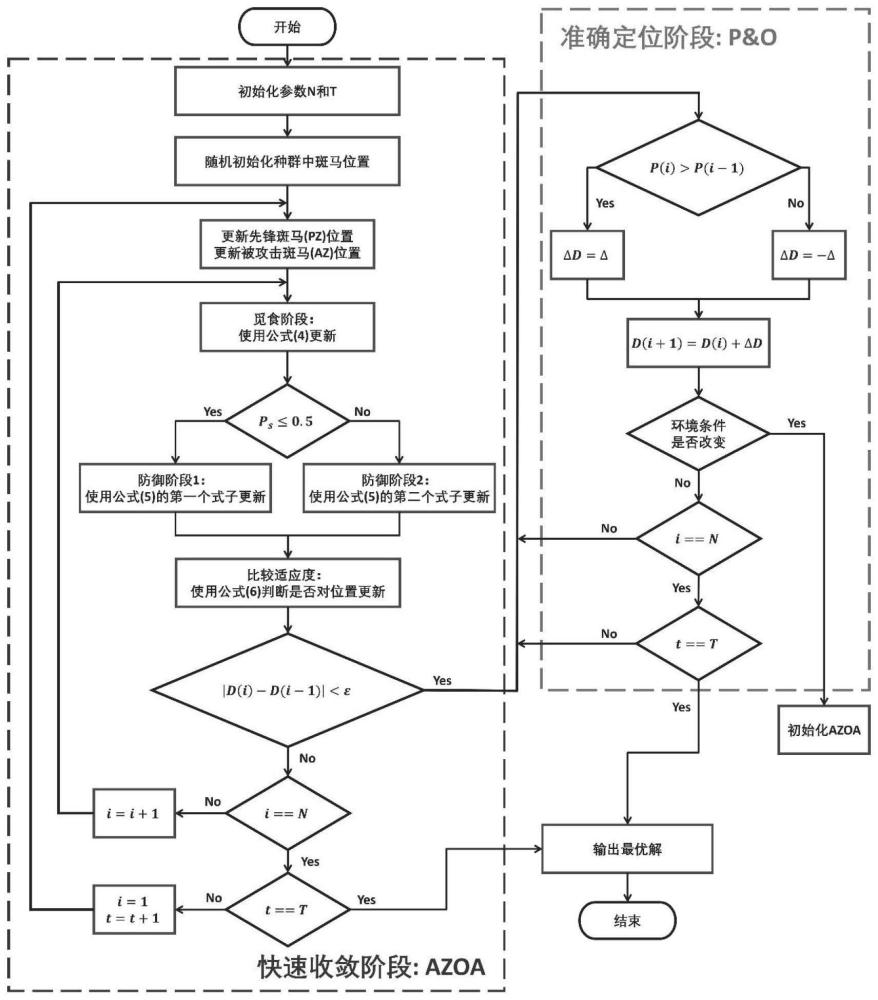
2、融合自适应斑马算法和扰动观测法的光伏跟踪控制方法,具体包括如下步骤:
3、步骤1、对斑马优化算法zoa进行改进,简化的同时加入自适应权重,得到自适应优化算法azoa,公式表示如下:
4、
5、
6、其中,xi,j为第i个斑马在第j维的分量,r为[0,1]之间的随机数,w为自适应权重,为觅食阶段更新后的第i个体在第j维的分量,pzj为先锋斑马的第j维分量;为防御阶段更新后的第i个斑马在第j维的分量;azj为被攻击斑马的第j维分量,ps为选择两种策略的概率,t表示当前迭代次数,t表示最大迭代次数;
7、步骤2.给予占空比一个相应的扰动,使得功率变化时,占空比也会相应的进行调整,公式表述如下:
8、
9、其中,dnew表示新的占空比,φ为给定的扰动量,p为当前输出功率,pold表示上一次迭代的输出功率;该算法根据由占空比计算获得的最新输出功率p,与上一次保存的输出功率pold进行比较,如果功率有所增大,则对占空比加上给定的扰动量,反之则对占空比减去给定的扰动量,以此不断往复,通过给定的扰动量实现对最大功率点的定位;
10、步骤3、改进的tdo算法和扰动观测法p&o的切换,具体公式表述如下:
11、d(t)=f(p(t-1))
12、其中f()表示新提出的azoa-p&o融合算法,p(t-1)表示第t-1次迭代更新出的占空比所对应的输出功率,而d(t)表示算法在第t次迭代的输出占空比。
13、进一步的,自适应权重的公式表述如下:
14、
15、其中,t表示第t次迭代,t表示迭代总次数。
16、进一步的,在光伏极值跟踪控制过程中,适应度对应dc/dc变换器的输出功率,输出功率是依靠mppt控制器将占空比送入dc/dc变换器而获得的,对适应度比较的过程进行简化,只在所有阶段结束后才进行适应度的比较;
17、
18、其中,xi表示更新前的第i个斑马的位置,表示更新后的第i个斑马的位置,表示更新后的第i个斑马的位置在送入dc/dc变换器后对应获得的输出功率,pi表示更新前的第i个斑马的位置在送入dc/dc变换器后对应获得的输出功率。
19、进一步的,本发明方法对应的光伏极值搜索控制系统包含三大核心组件:光伏阵列、dc/dc变换器以及mppt控制器;光伏阵列是由若干光伏电池单元依据特定的串并联方式组合而成,其输出的电流和电压会因环境光照强度及温度的变化而变化;mppt控制器内嵌自适应人工兔算法,能够根据光伏阵列的输出数据,动态地计算并调整占空比,进而控制dc/dc变换器的输出电压。
20、本发明的有益说明如下:
21、(1)提出了一种结合改进的自适应斑马算法和扰动观测法的融合算法的光伏系统最大功率点跟踪控制方法,加快了算法的收敛速度,同时减少了在收敛过程中算法的振荡。与其他算法相比,该方法的收敛时间从0.07秒降至0.021秒,收敛速度提高了两倍之多,同时在收敛过程中的振荡也得到了明显减少。
22、(2)提出了一套结合改进的自适应斑马算法和扰动观测法的融合算法的光伏发电跟踪控制系统,这种方法针对光伏发电系统在局部阴影遮挡条件下的运行,能够有效地实现对全局最大功率点的精准跟踪和控制,同时通过框架的搭建实现对最大功率点的持续跟踪控制。此外,该算法对光照条件的变化具有极快的响应速度,能够在环境条件持续变化的情况下,持续并高效地追踪和控制最大功率点。在传统算法需要大约0.1秒的时间来跟踪环境变化下的最大功率点时,所提出的改进斑马算法仅需要大约0.031秒,显示出了卓越的动态追踪能力和快速的响应性。
技术特征:1.融合自适应斑马算法和扰动观测法的光伏跟踪控制方法,其特征在于包括如下步骤:
2.根据权利要求1所述的融合自适应斑马算法和扰动观测法的光伏跟踪控制方法,其特征在于自适应权重的公式表述如下:
3.根据权利要求1所述的融合自适应斑马算法和扰动观测法的光伏跟踪控制方法,其特征在于在光伏极值跟踪控制过程中,适应度对应dc/dc变换器的输出功率,输出功率是依靠mppt控制器将占空比送入dc/dc变换器而获得的,对适应度比较的过程进行简化,只在所有阶段结束后才进行适应度的比较;
4.根据权利要求1所述的融合自适应斑马算法和扰动观测法的光伏跟踪控制方法,其特征在于实现该方法对应的光伏极值搜索控制系统包含三大核心组件:光伏阵列、dc/dc变换器以及mppt控制器;光伏阵列是由若干光伏电池单元依据特定的串并联方式组合而成,其输出的电流和电压会因环境光照强度及温度的变化而变化;mppt控制器内嵌自适应人工兔算法,能够根据光伏阵列的输出数据,动态地计算并调整占空比,进而控制dc/dc变换器的输出电压。
技术总结本发明公开了一种融合自适应斑马算法和扰动观测法的光伏跟踪控制方法。本发明包括如下步骤:步骤1、对斑马优化算法ZOA进行改进,简化的同时加入自适应权重,得到自适应优化算法AZOA;步骤2.给予占空比一个相应的扰动,使得功率变化时,占空比也会相应的进行调整;步骤3、改进的TDO算法和扰动观测法P&O的切换。本发明加快了算法的收敛速度,同时减少了在收敛过程中算法的振荡。与其他算法相比,该方法的收敛时间从0.07秒降至0.021秒,收敛速度提高了两倍之多,同时在收敛过程中的振荡也得到了明显减少。技术研发人员:刘光宇,鲍美君,赵皓衡,朱凌受保护的技术使用者:杭州电子科技大学技术研发日:技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240730/198697.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。