动态速度的规划方法、装置、计算机设备及存储介质与流程
- 国知局
- 2024-07-31 23:49:31
本申请涉及机器人领域,尤其涉及一种动态速度的规划方法、装置、计算机设备及存储介质。
背景技术:
1、工业自动化是指机器设备或生产过程在不需要人为直接干预的情况下,按照预期的目标实现测量、操纵等信息处理和过程控制的统称。工业自动化发展到现在,一体化、网络化和智能化成为行业的新方向,但是工业控制设备的智能化还处于初级阶段。
2、其中,在对异型件进行切割加工过程中,机器人发挥的作用越来越大,如何平滑柔顺的控制切割速度是急需解决的技术问题。
3、上述内容仅用于辅助理解本申请的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本申请的主要目的在于提供一种动态速度的规划方法、装置、计算机设备以及存储介质,旨在解决机器人在对异形构件进行切割加工过程中如何平滑柔顺的控制切割速度的技术问题。
2、一种动态速度的规划方法,应用于机器人,规划方法包括:
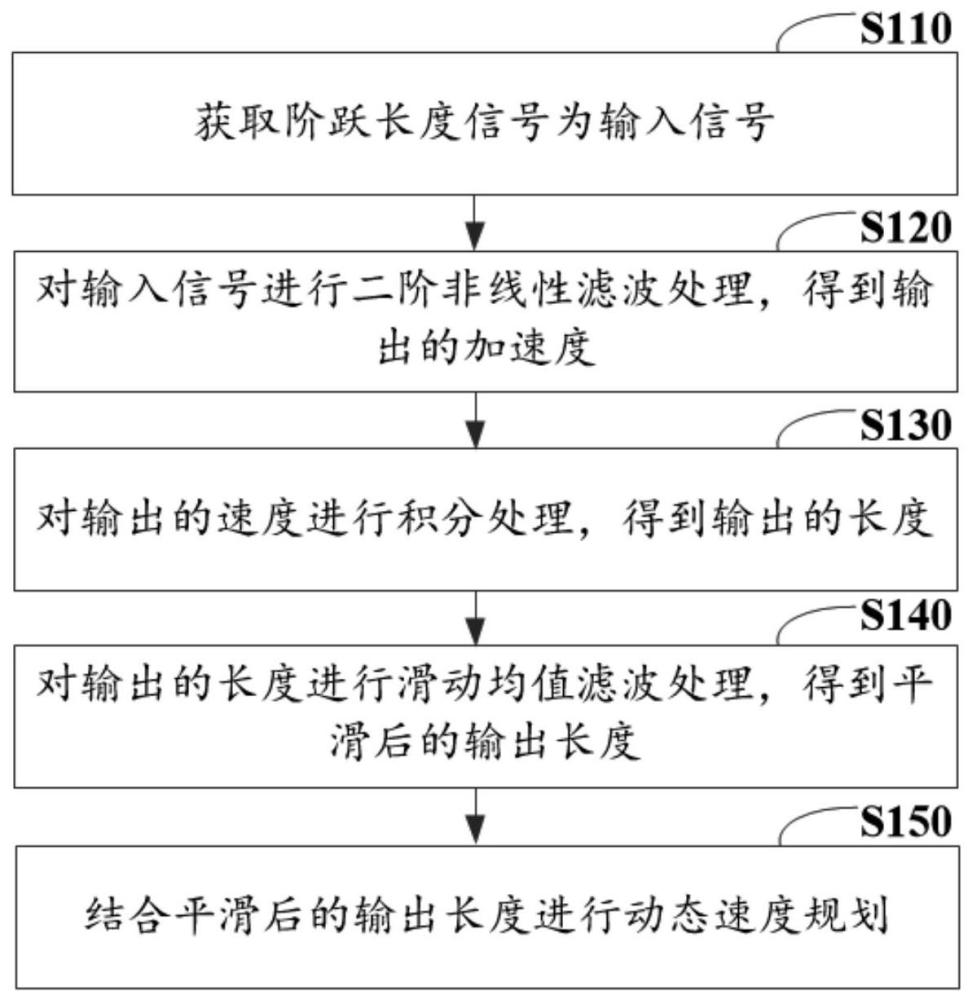
3、获取阶跃长度信号为输入信号;
4、对输入信号进行二阶非线性滤波处理,得到输出的加速度;
5、对输出的加速度进行积分处理,得到输出的速度;
6、对输出的速度进行积分处理,得到输出的长度;
7、对输出的长度进行滑动均值滤波处理,得到平滑后的输出长度;
8、结合平滑后的输出长度进行动态速度规划。
9、在一个实施例中,进行二阶非线性滤波处理的过程中采用的计算公式如下:
10、
11、
12、ek表示长度偏差,为速度偏差,sign和sat均为符号函数,a为加速度,v0为运行速度,ts为调节周期,k为正整数,m和zk为中间变量。
13、在一个实施例中,对输出的长度进行滑动均值滤波处理,得到平滑后的输出长度的过程中采用的计算公式如下:
14、
15、其中n为滑动窗口大小,ii为第k个周期的输入,ok为第k个周期的输出。
16、在一个实施例中,结合平滑后的输出长度进行动态速度规划的步骤包括:
17、将平滑后的输出长度作为弧长参数信息;
18、根据弧长参数信息获取机器人的轨迹位置曲线中对应的位置点信息;
19、根据位置点信息,经逆运动学计算获得机器人各个关节空间位置信息;
20、将各个关节空间位置信息发送给伺服驱动器执行,以对机器人的速度进行调节。
21、在一个实施例中,对输入信号进行二阶非线性滤波处理,得到输出的加速度的步骤之前还包括:
22、根据机器人的轨迹位置曲线,使用动态速度前瞻的方法对机器人的速度进行约束,得到速度约束值;
23、根据速度约束值设置二阶非线性滤波器的初始参数。
24、在一个实施例中,根据机器人的轨迹位置曲线,使用动态速度前瞻的方法对机器人的速度进行约束,得到速度约束值的步骤包括:
25、根据当前位置点、第一预设长度范围和第二预设长度范围计算确定第一前瞻长度段和第二前瞻长度段;
26、根据当前速度和第一前瞻长度段计算确定在第一前瞻长度结束后的第一速度约束值;
27、根据第二前瞻长度段和第二前瞻长度段结束后的速度确定在第一前瞻长度结束后的第二速度约束值;
28、计算当前位置点的最大运行速度以确定在第一前瞻长度结束后的第三速度约束值;
29、取第一速度约束值、第二速度约束值和第三速度约束值中的最小值作为当前长度阶段前瞻的速度约束值。
30、在一个实施例中,根据当前位置点、第一预设长度范围和第二预设长度范围计算确定第一前瞻长度段和第二前瞻长度段的步骤包括:
31、在第一预设长度范围内,获取轨迹位置曲线中的第一最大曲率值以及对应的第一位置点;
32、将第一位置点的行进长度与当前位置点的行进长度之间的差值作为第一前瞻长度段;
33、以第一位置点作为起始点,在第二预设长度范围内,获取轨迹位置曲线中的第二最大曲率值以及对应的第二位置点;
34、将第二位置点对应的行进长度与第一位置点之间的行进长度之间的差值作为第二前瞻长度段。
35、在一个实施例中,根据当前速度和第一前瞻长度段计算确定在第一前瞻长度段结束后的第一速度约束值的步骤中对应的计算公式为:
36、
37、vi-1为当前速度,vi为第一前瞻长度段结束后的速度值,amax为最大加速度,li为第一前瞻长度段;
38、根据第二前瞻长度段和第二前瞻长度段结束后的速度计算确定在第一前瞻长度结束后的第二速度约束值中的计算公式为:
39、
40、vi+1为第二前瞻长度段结束后的速度值,vi前瞻长度段结束后的速度值,amax为最大加速度,li+1为第二前瞻长度段;
41、计算当前位置点的最大运行速度以确定在第一前瞻长度结束后的第三速度约束值的步骤中的计算公式为:
42、
43、
44、pi为轨迹位置曲线中第i位置点,pi-1为轨迹位置曲线中第i-1位置点,为pi位置点的曲率值,ti为pi处的切矢,a为加速度,amax为最大加速度,vmax表示轨迹位置曲线中第i位置点的最大运行速度。
45、此外,还提供一种动态速度的规划装置,应用于机器人,规划装置包括:
46、输入信号单元,用于获取阶跃长度信号为输入信号;
47、第一滤波单元,用于对输入信号进行二阶非线性滤波处理,得到输出的加速度;
48、第一积分单元,用于对输出的加速度进行积分处理,得到输出的速度;
49、第二积分单元,用于对输出的速度进行积分处理,得到输出的长度;
50、第二滤波单元,用于对输出的长度进行滑动均值滤波处理,得到平滑后的输出长度;
51、速度规划单元,用于结合平滑后的输出长度进行动态速度规划。
52、此外,还提供一种计算机设备,计算机设备包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,计算机程序被处理器执行时实现上述规划方法的步骤。
53、此外,还提供一种存储介质,存储介质上存储有计算机程序,计算机程序被处理器执行时实现上述规划方法的步骤。
54、上述动态速度的规划方法,应用于机器人,该规划方法通过获取阶跃长度信号为输入信号,对输入信号进行二阶非线性滤波处理,得到输出的加速度,对输出的加速度进行积分处理,得到输出的速度,对输出的速度进行积分处理,得到输出的长度,对输出的长度进行滑动均值滤波处理,得到平滑后的输出长度,结合平滑后的输出长度进行动态速度规划,该规划方法通过设置二阶非线性滤波以及滑动均值滤波器,将滑动均值滤波器作为二阶非线性滤波的后置滤波器,最终使得输出的速度和加速度保持连续性而保持平稳,解决在对异形构件进行切割加工过程中如何平滑柔顺的控制切割速度的技术问题。
技术特征:1.一种动态速度的规划方法,其特征在于,应用于机器人,所述规划方法包括:
2.根据权利要求1所述的规划方法,其特征在于,所述进行二阶非线性滤波处理的过程中采用的计算公式如下:
3.根据权利要求1所述的规划方法,其特征在于,所述对所述输出的长度进行滑动均值滤波处理,得到平滑后的输出长度的过程中采用的计算公式如下:
4.根据权利要求1所述的规划方法,其特征在于,所述结合所述平滑后的输出长度进行动态速度规划的步骤包括:
5.根据权利要求1所述的规划方法,其特征在于,所述对所述输入信号进行二阶非线性滤波处理,得到输出的加速度的步骤之前还包括:
6.根据权利要求5所述的规划方法,其特征在于,所述根据机器人的轨迹位置曲线,使用动态速度前瞻的方法对机器人的速度进行约束,得到速度约束值的步骤包括:
7.根据权利要求6所述的规划方法,其特征在于,所述根据当前位置点、第一预设长度范围和第二预设长度范围计算确定第一前瞻长度段和第二前瞻长度段的步骤包括:
8.根据权利要求6所述的规划方法,其特征在于,所述根据当前速度和所述第一前瞻长度段计算确定在所述第一前瞻长度段结束后的第一速度约束值的步骤中对应的计算公式为:
9.一种动态速度的规划装置,其特征在于,应用于机器人,所述规划装置包括:
10.一种计算机设备,其特征在于,所述计算机设备包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如权利要求1至8中任一项所述的规划方法的步骤。
技术总结本申请涉及动态速度的规划方法、装置、计算机设备和存储介质,该规划方法应用于机器人,通过获取阶跃长度信号为输入信号,对输入信号进行二阶非线性滤波处理,得到输出的加速度,对输出的加速度进行积分处理,得到输出的速度,对输出的速度进行积分处理,得到输出的长度,对输出的长度进行滑动均值滤波处理,得到平滑后的输出长度,结合平滑后的输出长度进行动态速度规划,该规划方法通过设置二阶非线性滤波以及滑动均值滤波器,将滑动均值滤波器作为二阶非线性滤波的后置滤波器,最终使得输出的速度和加速度保持连续性而保持平稳,解决在对异形构件进行切割加工过程中如何平滑柔顺的控制切割速度的技术问题。技术研发人员:苗立晓,石建军,梁旺,魏成宇受保护的技术使用者:深圳市华成工业控制股份有限公司技术研发日:技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240730/198696.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。