一种基于动态事件驱动的可重构无人系统控制方法、装置、介质及产品
- 国知局
- 2024-07-31 23:41:52
本发明涉及可重构无人系统控制领域,特别是涉及一种基于动态事件驱动的可重构无人系统控制方法、装置、介质及产品。
背景技术:
1、可重构无人系统是由具有标准化机械和电气接口的制造模块组装而成的智能系统。每个模块由直流或交流电机驱动,并具有集成的减速机构和控制器。可重构无人系统在模块化和可重构性方面具有优势,模块关节之间的连接可以满足系统对环境任务的不同运动学和动力学要求。采用模块化技术不仅缩短了机械结构的设计时间,而且有助于改善无人系统通用性差、操作繁琐的缺点。目前,可重构无人系统在航空航天、深海勘探等极端危险环境中已经显现出强大的应用前景和发展潜力。然而,随着现代工业和机器人技术的快速发展,控制系统变得越来越复杂和不确定。以最小的能量或成本保持系统控制性能和稳定性是一个迫切的问题。
2、最优控制一直是控制领域的研究热点。不幸的是,由于系统的非线性特性,经典的最优控制理论对于实际的工业系统往往是无效的。随着强化学习的发展,自适应动态规划作为强化学习的一个分支,被认为是处理非线性系统最优控制问题的有效方法,如最优跟踪控制、鲁棒最优控制、带时滞的最优控制等。此外,自适应动态规划也是处理复杂系统的近似最优控制问题的重要工具,如随机系统、多智能体系统、机器人系统以及能源和电力系统。然而,上述自适应动态规划技术只能同时进行单个控制器的控制决策问题。随着控制器数量的增加,微分博弈作为多控制器最优控制问题提供了一个理想的框架。
3、在上述研究中,定期进行数据采样和控制更新。然而,一旦系统接近稳定或性能令人满意,总是期望控制器保持不活动状态,因此,事件驱动机制也逐渐应用到学习系统中。值得强调的是,很多的事件驱动规则被认为是静态的。主要原因是对应的触发条件只与当前的误差信号和状态有关。因此,静态事件驱动规则有些保守,仍然会导致不必要的数据处理。基于这一动机,通过定义内部动态变量,提出了动态触发规则,该规则产生更大的事件驱动间隔,同时也放宽了稳定性要求。随后一些有代表性的研究也证实了动态事件驱动在非周期通信和间歇控制方面具有更明显的优势。然而,对于具有不确定扰动的可重构无人系统,基于动态事件驱动机制的微分博弈近似最优控制方法研究较少。
技术实现思路
1、本发明的目的是提供一种基于动态事件驱动的可重构无人系统控制方法、装置、介质及产品,以提高对可重构无人系统的控制精度,降低控制过程中的能量损耗。
2、为实现上述目的,本发明提供了如下方案:
3、一种基于动态事件驱动的可重构无人系统控制方法,包括:
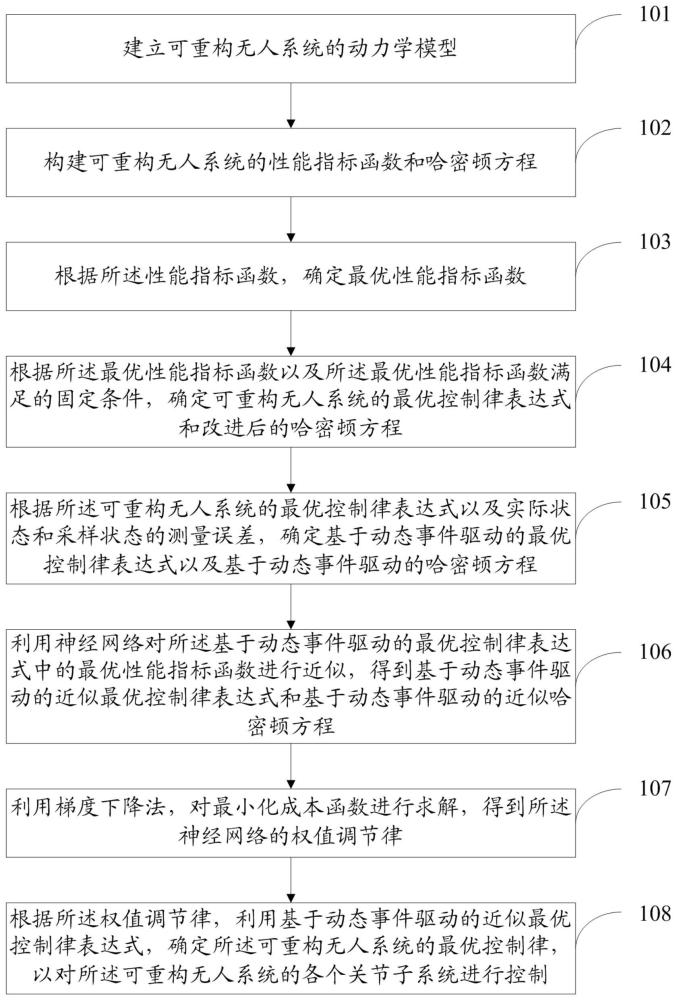
4、建立可重构无人系统的动力学模型;所述可重构无人系统的动力学模型是关于电机的转动惯量、减速比、关节的位置、速度以及加速度、关节摩擦力矩、子系统间的交联耦合项、关节力矩、扰动力矩和电机输入力矩的方程;
5、构建可重构无人系统的性能指标函数和哈密顿方程;所述哈密顿方程是关于所述性能指标函数和所述可重构无人系统的动力学模型的方程;
6、根据所述性能指标函数,确定最优性能指标函数;
7、根据所述最优性能指标函数以及所述最优性能指标函数满足的固定条件,确定可重构无人系统的最优控制律表达式和改进后的哈密顿方程;
8、根据所述可重构无人系统的最优控制律表达式以及实际状态和采样状态的测量误差,确定基于动态事件驱动的最优控制律表达式以及基于动态事件驱动的哈密顿方程;
9、利用神经网络对所述基于动态事件驱动的最优控制律表达式中的最优性能指标函数进行近似,得到基于动态事件驱动的近似最优控制律表达式和基于动态事件驱动的近似哈密顿方程;
10、利用梯度下降法,对最小化成本函数进行求解,得到所述神经网络的权值调节律;成本函数为关于基于动态事件驱动的近似哈密顿方程的方程;
11、根据所述权值调节律,利用基于动态事件驱动的近似最优控制律表达式,确定所述可重构无人系统的最优控制律,以对所述可重构无人系统的各个关节子系统进行控制。
12、可选地,所述可重构无人系统的动力学模型为:
13、
14、其中,i为第i个关节子系统;imi代表第i个关节子系统电机的转动惯量;λi表示第i个关节子系统的减速比;qi、分别代表第i个关节子系统的位置、速度以及加速度;表示第i个关节子系统的关节摩擦力矩;表示关节子系统间的交联耦合项;τsi代表由第i个关节子系统的关节力矩;di(qi)表示第i个关节子系统的扰动力矩;τi表示第i个关节子系统电机的输入力矩。
15、可选地,构建可重构无人系统的性能指标函数和哈密顿方程,具体包括:
16、构建可重构无人系统的性能指标函数;
17、对所述可重构无人系统的动力学模型进行扩张,得到扩张后的动力学模型;
18、根据所述性能指标函数和所述扩张后的动力学模型,构建哈密顿方程。
19、可选地,所述最优性能指标函数满足的固定条件为:
20、
21、其中,为哈密顿方程;s为混合误差;ui为第i个关节子系统电机的输入力矩;u-i为除第i个关节子系统电机的输入力矩以外的所有输入力矩;ji(s)为性能指标函数;表示梯度。
22、可选地,基于动态事件驱动的近似最优控制律表达式为:
23、
24、其中,mii为第i个关节子系统控制输入影响权值矩阵;gi为第i个关节子系统控制输入矩阵;δci为神经网络的径向基函数;为系统采样时刻的状态;为神经网络的实际权值。
25、一种计算机装置,包括:存储器、处理器以存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序以实现上述基于动态事件驱动的可重构无人系统控制方法的步骤。
26、一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现上述基于动态事件驱动的可重构无人系统控制方法的步骤。
27、一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述基于动态事件驱动的可重构无人系统控制方法的步骤。
28、根据本发明提供的具体实施例,本发明公开了以下技术效果:
29、本发明提供一种基于动态事件驱动的可重构无人系统控制方法、装置、介质及产品,通过建立可重构无人系统的动力学模型;构建可重构无人系统的性能指标函数和哈密顿方程;哈密顿方程是关于性能指标函数和可重构无人系统的动力学模型的方程;根据性能指标函数,确定最优性能指标函数;根据最优性能指标函数以及最优性能指标函数满足的固定条件,确定可重构无人系统的最优控制律表达式和改进后的哈密顿方程;根据可重构无人系统的最优控制律表达式以及实际状态和采样状态的测量误差,确定基于动态事件驱动的最优控制律表达式以及基于动态事件驱动的哈密顿方程;利用神经网络对基于动态事件驱动的最优控制律表达式中的最优性能指标函数进行近似,得到基于动态事件驱动的近似最优控制律表达式和基于动态事件驱动的近似哈密顿方程;利用梯度下降法,对最小化成本函数进行求解,得到所述神经网络的权值调节律;根据权值调节律,利用基于动态事件驱动的近似最优控制律表达式,确定可重构无人系统的最优控制律,以对可重构无人系统的各个关节子系统进行控制。本发明的控制力矩更加连续和平滑,不仅可以保持系统一致最终有界,而且可以提高控制精度,降低每个关节的能量损耗。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198134.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表