一种轮腿机器人鲁棒控制方法与流程
- 国知局
- 2024-07-31 23:41:44
本发明涉及轮腿机器人,特别涉及一种轮腿机器人鲁棒控制方法。
背景技术:
1、随着轮腿机器人在工业、军事和服务领域的快速普及,对其高效建模与智能控制的需求日益迫切。然而,传统建模方法在捕捉机械结构的复杂性和动态特性方面存在明显不足,导致建模精度的限制。同时,传统pid控制方法在面对不确定性条件时表现不佳,对环境变化和干扰的适应性有待提高。
技术实现思路
1、本发明公开了一种轮腿机器人鲁棒控制方法,它显著提高了轮腿机器人的建模精度。
2、本发明采用了以下技术方案,具体方法如下:
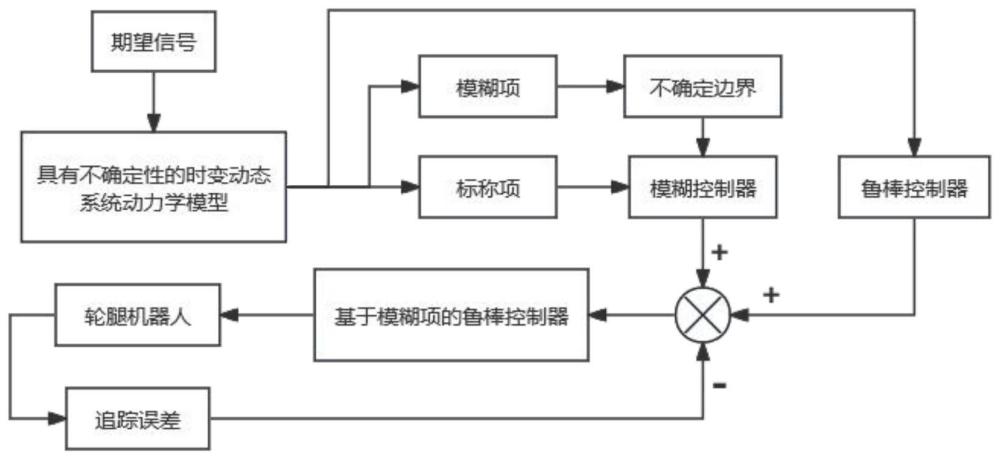
3、简化并构建轮腿机器人动力学模型;
4、分解动力学模型,获取标称项和模糊项,确定模糊项的边界;
5、根据模糊项的边界,构建模糊控制器以控制轮腿机器人;
6、针对模糊控制器控制产生的控制误差,构建鲁棒控制器;
7、优化鲁棒控制器的控制参数;
8、以模糊控制器和优化后的鲁棒控制器控制轮腿机器人。
9、进一步地,在运动过程中,假设轮腿机器人重心位于穿过轮腿机器人轮轴心的铅垂线上,针对轮腿机器人一侧运动机构,构建轮腿机器人动力学模型方法如下:
10、总动能
11、
12、总势能
13、v=v0+v1+v2+v3#
14、=0+m1gsinθ1l1+2m2gl1sinθ1+m2g2l2sinθ2+2m3gl1sinθ1+2m3gl2sinθ2
15、=m1gsinθ1l1+2m2gl1sinθ1+m2g2l2sinθ2+2m3gl1sinθ1+2m3gl2sinθ2
16、=(m1+2m2+2m3)gl1sinθ1+(m2+2m3)gl2sinθ2
17、拉格朗日能量
18、
19、整理成矩阵形式
20、
21、其中
22、a11=m0+m1+m2+m3#
23、a12=-(m1+2m2+2m3)l1sinθ1
24、a13=-(m2+2m3)l2sinθ2
25、a21=-(m1+2m2+2m3)l1sinθ1
26、
27、a23=(2m2+4m3)l1l2cos(θ2-θ1)
28、a31=-(m2+2m3)l2sinθ2
29、a32=(2m2+4m3)l1l2cos(θ2-θ1)
30、
31、
32、
33、
34、
35、
36、
37、c2=(m1+2m2+2m3)gl1cosθ1
38、c3=(m2+2m3)gl2cosθ2
39、令则则
40、
41、动力学模型为:
42、
43、以上公式中,θ1为摆杆1与水平方向夹角,θ2为摆杆2与水平方向夹角,x为驱动轮位移,m0为驱动轮0质量,m1为摆杆1质量,m2为摆杆2质量,m3为等效主体质量,l1为摆杆1到驱动轮轴的距离,l1为摆杆1全长,l2为摆杆2到转轴的距离,l2为摆杆2全长。
44、进一步地,获取标称项和模糊项,具体方法如下:
45、引入不确定因子代表随时间变化而不断变化的控制不确定性参数。重构建动力学模型为:
46、
47、分解为:
48、
49、
50、
51、其中,表示的是标称项,δm(*)、δc(*)、δg(*)为与相关的不确定项。
52、进一步地,确定模糊项的边界,具体方法如下:
53、构建一个函数φ包含了系统中所有的不确定性
54、
55、其中,αd是理论轨迹,e为追踪误差
56、为所有不确定性构成的函数φ的上界,即
57、
58、其中||*||为欧几里得范数。
59、进一步地,构建模糊控制器,具体如下:
60、
61、进一步地,构建鲁棒控制器具体如下:
62、
63、其中,β、s、δ为一个大于零的常数。
64、进一步地,优化鲁棒控制器的控制参数,具体方法为:
65、采用遗传算法对β、s、δ的取值进行优化。
66、进一步地,遗传算法具体做优化方法如下
67、构建一个个体型式wi=diag[w1,w2,w3],w1,w2,w3>0,设定取值范围为[u1,u2],其中w1=β;w2=s;w3=δ;
68、开始阶段随机生成一组可行解,作为第一代种群
69、采用误差来评估构建适应度函数t1代表误差出现的时刻;t2代表的是系统恢复至稳定状态的时间,数值按照实验实际结果选取;e(t)为被控变量和理想值之间的误差;
70、在选择的种群中,计算每个个体的适应度之和
71、计算每个个体的相对适应度,即选择概率si=f(wi)/s,随机生成一个0到1之前的随机数rad;
72、交叉形成两个新的个体b1=a1*rad+a2*(1-rad)、b2=a2*rad+a1*(1-rad),其中bi为新生成的下一代个体,ai为上一代中随机的两个个体;
73、个体基因发生变异,其中pmn为第m个个体中的第n个基因,这里m∈[0,n],n∈[1,3],mn都是整数,pmin和pmax为基因数值的上下限,即u1,u2;
74、q(d)为迭代系数,其表达式为
75、q(d)=rad*(1-d/d)
76、其中d为本次的迭代次数,d为整个种群的最大迭代次数;
77、每次迭代之后,假设交叉生成了k1个新的个体,变异生成了k2个新的个体,为了保证每次迭代的种群个数相同,剩下个体选择上一代个体中选择概率前n-k1-k2个个体进行复制;
78、重复迭代,选择限定进化次数的方式设定终止条件,当达到设置的迭代次数之后,输出最后得到的参数值。
79、由于采用了以上技术方案,本发明具有以下有益效果:
80、1、通过针对系统约束条件简化机械结构,成功建立了更为准确的动力学模型。
81、2、引入鲁棒伺服控制器和抗干扰的鲁棒控制算法,使得控制系统在不确定条件下具备更强的适应性和鲁棒性;不仅显著提高了轮腿机器人的建模精度,同时有效地改善了其鲁棒性和轨迹跟踪性能。
技术特征:1.一种轮腿机器人鲁棒控制方法,其特征在于,具体方法如下:
2.如权利要求1所述轮腿机器人鲁棒控制方法,其特征在于,在运动过程中,假设轮腿机器人重心位于穿过轮腿机器人轮轴心的铅垂线上,针对轮腿机器人一侧运动机构,构建轮腿机器人动力学模型方法如下:
3.如权利要求2所述轮腿机器人鲁棒控制方法,其特征在于,获取标称项和模糊项,具体方法如下:
4.如权利要求3所述轮腿机器人鲁棒控制方法,其特征在于,确定模糊项的边界,具体方法如下:
5.如权利要求4所述轮腿机器人鲁棒控制方法,其特征在于,构建模糊控制器,具体如下:
6.如权利要求5所述轮腿机器人鲁棒控制方法,其特征在于,构建鲁棒控制器具体如下:
7.如权利要求6所述轮腿机器人鲁棒控制方法,其特征在于,优化鲁棒控制器的控制参数,具体方法为:
8.如权利要求7所述轮腿机器人鲁棒控制方法,其特征在于,遗传算法具体做优化方法如下
技术总结本发明涉及轮腿机器人技术领域,特别涉及一种轮腿机器人鲁棒控制方法。首先,在考虑系统约束条件的基础上,对轮腿机器人的机械结构进行适当简化,建立了轮腿机器人的精准动力学模型。其次,基于构建的动力学模型,针对具有不确定性的情况,引入了一种抗干扰的鲁棒模糊控制算法。最后,采用基于遗传算法理念,实现了轮腿机器人控制器的最优控制。本发明在面对不确定性条件下,有效提升了轮腿机器人的鲁棒性和轨迹跟踪精度。技术研发人员:李锐,李杨杨,管中良,吴平志,张明星受保护的技术使用者:合肥中科深谷科技发展有限公司技术研发日:技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240730/198124.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表