一种基于A星算法的无人机灾后应急路径规划方法与流程
- 国知局
- 2024-07-31 23:41:38
本发明涉及一种基于a星算法的无人机灾后应急路径规划方法,属于无人机。
背景技术:
1、近年来,自然灾害不断涌现,严重的地震、洪水、泥石流、降雪、台风等,都严重地威胁电网的稳定运行。因此,电力巡检就成为了电网安全一个必不可少的组成部分,尤其是在发生严重自然灾害时,要及时找出电网被损毁处,及时抢修,保障电力安全。
2、虽然,目前电力巡检配置了一些轻小型巡检无人机,产生了一些积极效果,但面对地形复杂,山地环境多,遮挡严重,难以实现远距离、超视距巡检等问题,难以实现全电网全天时全天候巡检。因此本发明对智能路径规划算法进行开发,优化巡检路径,为电网抢修提供技术支撑。
3、现有技术如专利号“cn117109597a”公开了一种基于改进a星算法的无人机路径规划方法和装置,识别并标记所述飞行区域中的障碍物,对所述障碍物进行处理;根据对障碍物的处理结果生成障碍物权重系数,对所述a星算法模型的评价函数进行加权;基于加权后的评价函数规划所述无人机的路径,利用三维栅格地图中的障碍物权重系数对评价函数进行加权,改进的a星算法保证了无人机的全局最优路径,提高了无人机实时路径规划的效率和安全性。
4、但是上述技术方案只考虑到了无人机飞行区域中的障碍物,未对无人机的能耗进行全面考虑,且没有考虑规划的应急性。这会导致规划出的路径可能不是最优的,无法有效地节省无人机的能源消耗,限制了无人机的飞行时间和范围。
5、同时未充分考虑无人机与其他入侵机之间的碰撞问题,这可能导致无人机之间的飞行冲突,影响路径规划的安全性和效果。
6、因此,传统的a星算法难以满足极端灾后无人机应急路径规划的需求。
技术实现思路
1、为了解决上述现有技术中存在的问题,本发明提出了。
2、本发明的技术方案如下:
3、一方面,本发明提供了一种基于a星算法的无人机灾后应急路径规划方法,包括以下步骤:
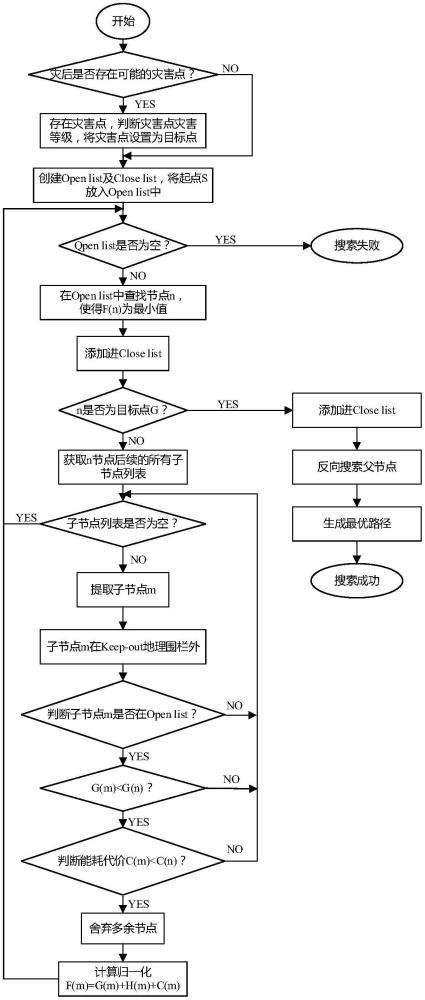
4、基于电网区域构建无人机飞行区域的三维格栅地图,并在地图中设置起始点与目标点,其中目标点为电网区域的灾害发生地点,并设置每个目标点的灾害等级;
5、初始化a星算法模型,创建空的开放列表以及关闭列表,并将三维格栅地图中障碍物所在的节点加入关闭列表中,同时通过无人机的能耗模型改进a星算法模型的节点评估函数;
6、通过a星算法模型对无人机灾后应急路径进行规划。
7、作为本发明的优选实施方式,所述无人机灾后应急路径规划包括重点灾害点巡检阶段的路径规划和全域电网巡检阶段的路径规划;
8、所述重点灾害点巡检阶段的路径规划步骤为:
9、将灾害等级大于阈值的目标点设置为本阶段路径规划的目标点,并根据灾害等级大小进行排序,再将起始点加入开放列表中并将起始点视为当前节点;
10、当开放列表不为空时,重复以下步骤:对当前节点的相邻节点进行遍历,若相邻节点已储存在关闭列表中,则忽略该节点,若相邻节点不在开放列表及关闭列表中,则将该节点加入开放列表中作为待探索节点,通过节点评估函数对开放列表储存的待探索节点进行评估,将当前节点作为评估值最小的待探索节点的父节点并将该待探索节点作为当前节点后,再将当前节点的父节点移除开放列表加入关闭列表中;若相邻节点已经在开放列表中,则比较起始点到当前节点的实际移动代价与起始点到该相邻节点的实际移动代价,若起始点到该相邻节点的实际移动代价比较小,则将该相邻节点的父节点作为当前节点并通过节点评估函数对当前节点重新评估,重复该步骤直至当前节点为目标点时,探索成功;
11、当开放列表为空时,表示没有找到路径,探索失败;
12、当一个目标点探索成功后,将该目标点作为起始点探索下一个目标点,根据排序对所有目标点进行探索。
13、作为本发明的优选实施方式,所述全域电网巡检阶段的路径规划步骤为:
14、将重点灾害点巡查阶段最后一个目标点作为起始点,以灾害等级小于阈值的目标点作为目标点,并根据灾害等级大小进行排序,将起始点加入开放列表中并将起始点视为当前节点;
15、当开放列表不为空时,重复以下步骤:对当前节点的相邻节点进行遍历,若相邻节点已储存在关闭列表中,则忽略该节点,若相邻节点不在开放列表及关闭列表中,则将该节点加入开放列表中作为待探索节点,通过节点评估函数对开放列表储存的待探索节点进行评估,将当前节点作为评估值最小的待探索节点的父节点并将该待探索节点作为当前节点后,再将当前节点的父节点移除开放列表加入关闭列表中;若相邻节点已经在开放列表中,则比较起始点到当前节点的实际移动代价与起始点到该相邻节点的实际移动代价,若起始点到该相邻节点的实际移动代价比较小,则将该相邻节点的父节点作为当前节点并通过节点评估函数对当前节点重新评估,重复该步骤直至当前节点为目标点时,探索成功;
16、当开放列表为空时,表示没有找到路径,探索失败;
17、当一个目标点探索成功后,将该目标点作为起始点探索下一个目标点,根据排序对所有目标点进行探索。
18、作为本发明的优选实施方式,所述无人机的能耗模型为:
19、e=p×t+p0×t0
20、其中:e表示无人机的总能耗;p表示无人机推进器的功率;t表示飞行时间;p0表示无人机静置待机时的平均功率;t0表示无人机静置待机的时间;
21、在路径规划过程中,根据当前节点和前一个节点的位置计算两个节点间的距离d,则基于无人机的能耗模型得到当前节点n的能耗代价c(n):
22、c(n)=p×t+p0×t0=(d/v)×p+p0×t0
23、其中:v为无人机的飞行速度。
24、作为本发明的优选实施方式,通过无人机的能耗模型改进的a星算法模型的节点评估函数f(n)为:
25、f(n)=g(n)+h(n)+c(n)
26、其中:g(n)为起始点到当前节点的实际移动代价;h(n)为当前节点到目标点的启发式估计代价;c(n)代表当前节点的能耗代价;
27、节点评估函数f(n)评估当前节点前,需要对当前节点的各项代价进行归一化处理:
28、对g代价进行归一化:
29、获取所有g值,并筛选出其中的最大值gmax,最小值gmin,再对当前节点的g值进行归一化处理:
30、对h代价进行归一化:
31、获取所有h值,并筛选出其中的最大值hmax,最小值hmin,再对当前节点的h值进行归一化处理:
32、对能耗代价c进行归一化:
33、获取所有c值,并筛选出其中的最大值cmax,最小值cmin,再对当前节点的c值进行归一化处理:
34、作为本发明的优选实施方式,通过地理围栏算法计算三维格栅地图中障碍物所在的节点。
35、作为本发明的优选实施方式,设置无人机安全间隔应对路径规划过程中与其它无人机的飞行冲突,具体步骤如下:
36、设置两无人机到达最接近点cpa的时间tcpa,并通过近似值τ近似估算tcpa,τ的定义如下:
37、
38、其中:r为两机相对距离;为两机相对距离变化率;
39、为无人机周围设置一个固定间隔dmod,并通过dmod对τ进行修正得到τmod,具体如下式所示:
40、
41、在水平方向上引入水平间隔hmd作为两机到达最接近点cpa时的固定间隔值,水平间隔hmd的计算公式如下:
42、
43、其中:dx、dy分别表示x,y维度两机的水平间隔距离;vrx、vry分别表示表示x,y维度两机的相对速度;
44、综合上述,无人机安全间隔的判断条件定义如下:
45、wcv≡hwcv and vwcv
46、hwcv≡[||s||≤dmod]or([hmd≤hmd*]and[0≤τmod≤τ*mod])
47、vwcv≡[-h*≤dh≤h*]
48、其中:wcv表示无人机的安全间隔;hwcv表示无人机水平方向安全间隔;vwcv表示无人机垂直方向安全间隔;s表示无人机的水平位置信息;hmd*表示设置的hmd阈值,与dmod相等;τ*mod表示设置的τmod阈值;dh表示两机当前垂直间隔距离;h*表示垂直安全间隔阈值。
49、另一方面,本发明还提供了一种基于a星算法的无人机灾后应急路径规划系统,包括地图构建模块、算法初始化模块以及路径规划模块;
50、所述地图构建模块用于基于电网区域构建无人机飞行区域的三维格栅地图,并在地图中设置起始点与目标点,其中目标点为电网区域的灾害发生地点,并设置每个目标点的灾害等级;
51、所述算法初始化模块用于初始化a星算法模型,创建空的开放列表以及关闭列表,并将三维格栅地图中障碍物所在的节点加入关闭列表中,同时通过无人机的能耗模型改进a星算法模型的节点评估函数;
52、所述路径规划模块用于通过a星算法模型对无人机灾后应急路径进行规划。
53、再一方面,本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如本发明任一实施例所述的方法。
54、再一方面,本发明还提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如本发明任一实施例所述的方法。
55、本发明具有如下有益效果:
56、1、本发明面向无人机极端灾后应急路径规划场景,将无人机能耗模型引入a星算法,并作为一种评估函数,通过能耗代价可以评估路径点之间的所需能耗,这种处理能够更有效的进行路径规划,防止无人机飞行过程中出现无人机电量无法满足灾后巡视所需的路径规划方案。
57、2、本发明将传统的a*算法路径规划过程分为了重点灾害点巡检阶段和全域电网巡检阶段。重点灾害点巡检阶段起始点是当前位置,目标点是重点灾害点;全域电网巡检阶段起始点为重点灾害点,目标点为电网巡检的终点,通过这种设计能够满足先重点-再全域的规划过程,保证无人机能够急中有序地进行全域巡检。
58、3、本发明使用keep-out地理围栏算法和well clear安全间隔标准保持无人机与静态障碍物和动态障碍物之间的安全间隔,这种设计提高了无人机飞行的安全性,降低了发生碰撞的风险。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198111.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。