电力巡检机器人路径规划方法及系统与流程
- 国知局
- 2024-07-31 23:41:33
本发明涉及巡检机器人控制,尤其涉及电力巡检机器人路径规划方法及系统。
背景技术:
1、电厂巡检是确保电力系统安全、稳定运行的重要环节。传统的电厂巡检主要依靠人工完成,存在工作效率低、成本高、安全隐患等问题。随着机器人技术的快速发展,电厂巡检机器人逐渐成为电力系统巡检的重要工具。电厂巡检机器人具有自动化、高效、安全等优点,可以有效地提高巡检效率和准确性,降低巡检成本。
2、然而,电厂环境复杂,设备众多,如何为电厂巡检机器人规划合理的巡检路径,提高巡检覆盖率和效率,是一个具有挑战性的问题。现有的电厂巡检机器人路径规划方法主要依赖于人工经验或简单的预设规则,缺乏对设备状态和巡检需求的动态考虑,导致巡检效果不佳。
技术实现思路
1、本发明的目的是为了提供一种能够根据设备状态自动生成巡检路径的路径规划方法及系统。
2、为了实现上述目的,本发明采用了如下技术方案:
3、电力巡检机器人路径规划方法,包括:
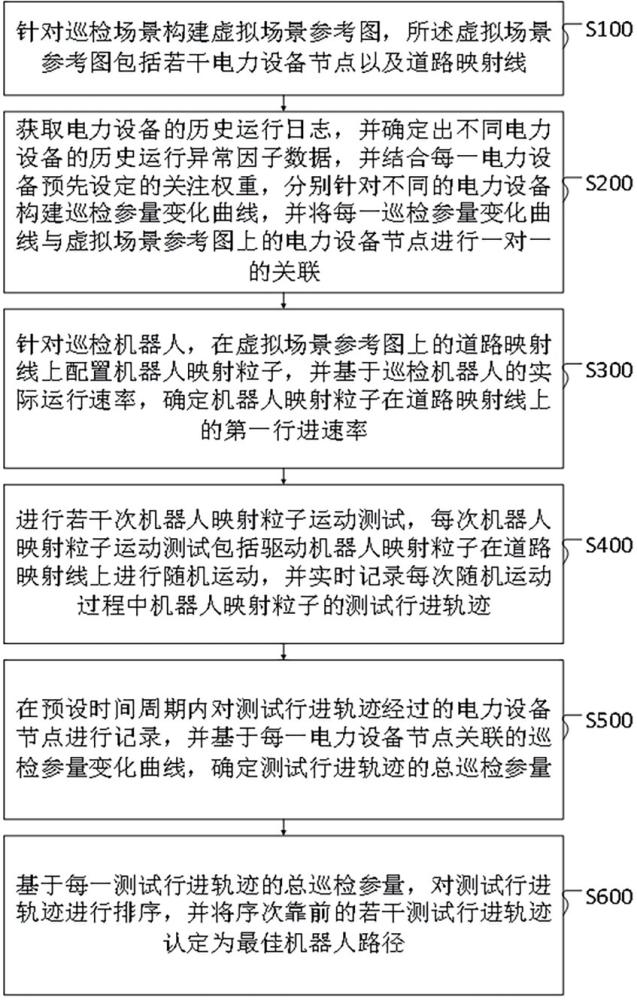
4、针对巡检场景构建虚拟场景参考图,所述虚拟场景参考图包括若干电力设备节点以及道路映射线;
5、获取电力设备的历史运行日志,并确定出不同电力设备的历史运行异常因子数据,并结合每一电力设备预先设定的关注权重,分别针对不同的电力设备构建巡检参量变化曲线,并将每一巡检参量变化曲线与虚拟场景参考图上的电力设备节点进行一对一的关联;
6、针对巡检机器人,在虚拟场景参考图上的道路映射线上配置机器人映射粒子,并基于巡检机器人的实际运行速率,确定机器人映射粒子在道路映射线上的第一行进速率;
7、进行若干次机器人映射粒子运动测试,每次机器人映射粒子运动测试包括驱动机器人映射粒子在道路映射线上进行随机运动,并实时记录每次随机运动过程中机器人映射粒子的测试行进轨迹;
8、在预设时间周期内对测试行进轨迹经过的电力设备节点进行记录,并基于每一电力设备节点关联的巡检参量变化曲线,确定测试行进轨迹的总巡检参量;
9、基于每一测试行进轨迹的总巡检参量,对测试行进轨迹进行排序,并将序次靠前的若干测试行进轨迹认定为最佳机器人路径。
10、在本发明公开的一些实施例中,分别针对每一电力设备构建巡检参量变化曲线的方法包括:
11、对电力设备的历史运行日志进行分析,确定每一电力设备在不同时间节点的历史运行强度参量,以及不同时间节点的异常程度参量;
12、对连续的时间节点的历史运行强度参量进行分析,若在连续第一预设时间段内的历史运行强度参量的积累量大于等于预设值,则将连续的第一预设时间段认定为第一判断时间区段,并进行截取记录;
13、以同一电力设备的第一判断时间区段以及第一判断时间区段后的第二预设时间段为分析时间长度,对电力设备的运行状态进行异常判断分析,若存在有异常状态,则记录一次需关注异常,并将第一判断时间区段认定为第一关注时间区段,并随机选取预设区段数量的第一关注时间区段,统计总需关注异常次数;
14、基于同一电力设备对应的需关注异常次数、实时历史运行强度参量曲线以及关注权重,构建巡检参量变化曲线。
15、在本发明公开的一些实施例中,构建巡检参量变化曲线的方法包括:
16、对实时运行强度参量曲线进行连续分析,计算实时运行强度参量的累计值,记为实时运行强度参量累计量,并针对实时运行强度参量累计量构建巡检基础参量算子,并以巡检参量算子计算出的巡检基础参量为纵坐标,时间为横坐标,构建巡检基础参量曲线;
17、对实时运行强度参量曲线进行连续分析,若出现第一预设时间段内的实时运行强度参量累计量大于等于预设值,则基于实时运行强度参量累计量与预设标准累计量的累积量差异值,确当对巡检基础参量曲线的巡检基础参量的修正系数,并对巡检基础参量曲线进行修正,得到巡检参量变化曲线。
18、在本发明公开的一些实施例中,巡检基础参量算子的表达式为:
19、;
20、其中,为巡检基础参量,为基础参量转换系数,为第一预设时间段的时间长度,为第t时间节点的实时运行强度参量,为运行强度参量调整常数;
21、确定修正系数的表达式为:
22、;
23、其中,为修正系数对应值,为修正系数转换系数,为第一预设时间段的时间长度,为第t时间节点的实时运行强度参量,为预设标准累计量,为累计量差异值调整常数。
24、在本发明公开的一些实施例中,驱动机器人映射粒子在道路映射线上进行随机运动的方法包括:
25、将环绕或通向同一电力设备的道路映射线进行划定并归类,得到道路映射线组;
26、驱动机器人映射粒子在道路映射线上进行随机运动时,限制机器人映射粒子在第一预设时间间隔内重复进入所属同一道路映射线组的道路映射线。
27、在本发明公开的一些实施例中,确定测试行进轨迹的总巡检参量的方法包括:
28、对虚拟场景参考图中的电力设备的巡检触发区进行划定,并讲巡检触发区与道路映射线中相互交叉的区段进行标记,记为巡检触发区段;
29、对所属同一巡检触发区的巡检触发区段之间的时间间隔进行分析,将巡检触发区段相互之间的时间间隔小于等于第二预设时间间隔的情况认定为对电力设备的一次有效巡检,并将剩余的巡检触发区段的每一次触发情况认定为对电力设备的一次有效巡检;
30、对不同电力设备对应的有效巡检次数进行统计,并结合巡检参量变化曲线,计算得到测试行进轨迹的总巡检参量。
31、在本发明公开的一些实施例中,确定测试行进轨迹的总巡检参量的方法还包括:
32、确定电力设备被有效巡检的时间节点,并基于不同电力设备被有效巡检的时间节点的先后关系,依次截取电力设备巡检参量变化曲线在对应时间节点的巡检参量,记为有效巡检参量,且每次截取巡检参量后,对巡检参量变化曲线进行归零;
33、计算所有有效巡检参量的总和,得到总巡检参量。
34、在本发明公开的一些实施例中,还公开了电力巡检机器人路径规划系统,包括:
35、第一模块,用于针对巡检场景构建虚拟场景参考图,所述虚拟场景参考图包括若干电力设备节点以及道路映射线;
36、第二模块,用于获取电力设备的历史运行日志,并确定出不同电力设备的历史运行异常因子数据,并结合每一电力设备预先设定的关注权重,分别针对不同的电力设备构建巡检参量变化曲线,并将每一巡检参量变化曲线与虚拟场景参考图上的电力设备节点进行一对一的关联;
37、第三模块,用于针对巡检机器人,在虚拟场景参考图上的道路映射线上配置机器人映射粒子,并基于巡检机器人的实际运行速率,确定机器人映射粒子在道路映射线上的第一行进速率,进行若干次机器人映射粒子运动测试,每次机器人映射粒子运动测试包括驱动机器人映射粒子在道路映射线上进行随机运动,并实时记录每次随机运动过程中机器人映射粒子的测试行进轨迹;
38、第四模块,用于在预设时间周期内对测试行进轨迹经过的电力设备节点进行记录,并基于每一电力设备节点关联的巡检参量变化曲线,确定测试行进轨迹的总巡检参量,基于每一测试行进轨迹的总巡检参量,对测试行进轨迹进行排序,并将序次靠前的若干测试行进轨迹认定为最佳机器人路径。
39、本发明公开了电力巡检机器人路径规划方法及系统,涉及巡检机器人控制技术领域,包括在虚拟场景参考图上的道路映射线上配置机器人映射粒子,并基于巡检机器人的实际运行速率,确定机器人映射粒子在道路映射线上的第一行进速率,在预设时间周期内对测试行进轨迹经过的电力设备节点进行记录,并基于每一电力设备节点关联的巡检参量变化曲线,确定测试行进轨迹的总巡检参量,基于每一测试行进轨迹的总巡检参量,对测试行进轨迹进行排序,并将序次靠前的若干测试行进轨迹认定为最佳机器人路径,本发明公开的技术方案实现了根据电力设备的运行状态自动生成机器人的行进轨迹,提高了对电力设备的有效巡检效率。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198102.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表