移动式电力智能联动操作平台的制作方法
- 国知局
- 2024-07-31 23:28:05
本发明涉及电力维护,具体涉及移动式电力智能联动操作平台。
背景技术:
1、随着智能电网的不断发展,电网设备的不断增多,电网电压也不断提高。为了安全的需要,很多设备部署在配电开关柜中,传统的方法采用人力来操作配电开关柜,电工操作时容易发生安全事故。
2、随着机器人技术的兴起,配电开关柜开始引入机器人进行自动化或者远程操控。利用功能完善,操作灵活的机器人操作配电柜,既能够提高配电开关柜控制精准程度,又可以提高安全操作系数,保障电网企业对社会供电的稳定性,同时保证电网及其设备的安全性,具有重要的作用和意义。
3、目前,已经有企业在高压配电机房内配备用于分合闸的机器人,可有效降低人员触电风险。尤其是智能化机器人可做到远程接收信息、自动化操作以及自动化充电等。
4、但是,配电机房内部为精密设备,机器人在自动巡检或者行驶操作位时,存在碰撞至机房设备上问题,严重时造成设备故障甚至发生短路、断路等事故。另外,机器人在机房内除实现分合闸功能外,还需识别指示灯状态、操作按钮开关和摇小车开关等功能。
技术实现思路
1、为了解决上述现有技术存在的不足,本发明提供移动式电力智能联动操作平台。
2、本发明提出的技术方案为:
3、移动式电力智能联动操作平台,包括:
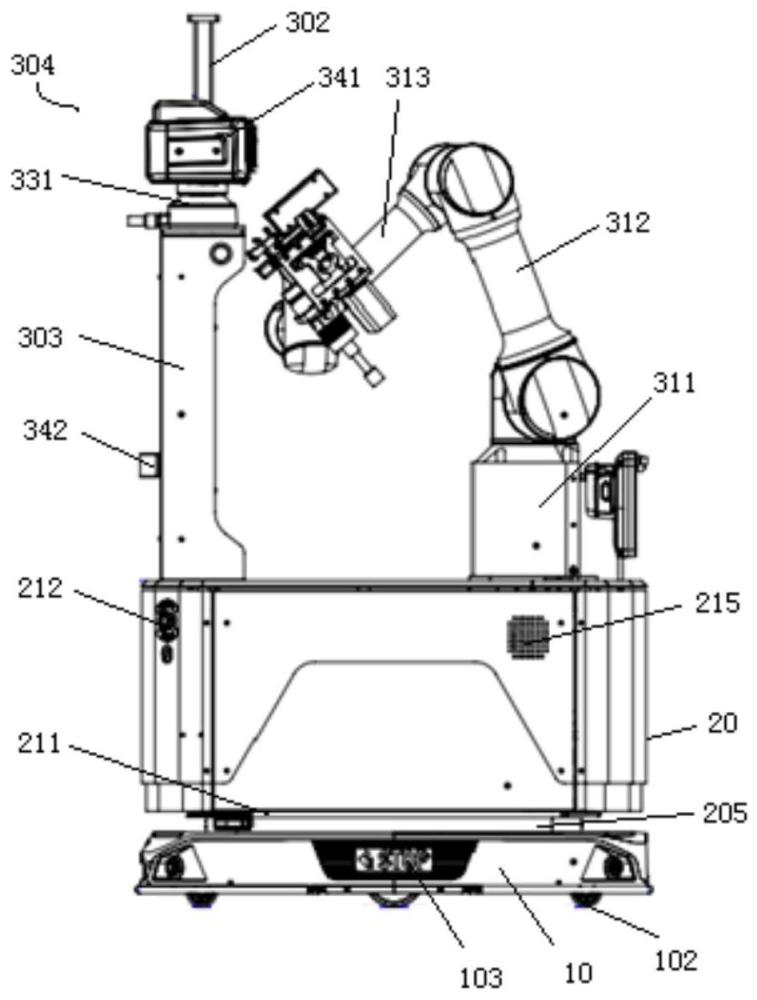
4、底盘车、支撑平台和操作装置;
5、所述底盘车包括底座、设置于底座下方的移动轮、以及设置于底座内部的导航控制模块,所述移动轮通过驱动杆与导航控制模块连接,所述底座的下方设置限位凸块;
6、所述支撑平台包括外壳、控制装置、电源模块和通讯模块;所述外壳的底部设置与底盘车连接的凹槽,所述凹槽上设置转动盘,所述转动盘与导航控制模块连接,所述电源模块的输出端连接导航控制模块,所述控制装置连接导航控制模块;
7、所述操作装置包括机械臂、用于安装电缆的电缆支架、以及用于安装监测装置的云台支架;
8、所述电缆支架通过支架底座与支撑平台连接,所述监测装置包括摄像机和传感器,所述摄像机通过云台与云台支架连接。
9、作为本发明的进一步技术方案为,所述控制装置包括总控制器、云台控制器、机械臂控制器、底盘车控制器和i/o控制器,所述云台控制器、机械臂控制器、底盘车控制器和i/o控制器与总控制器连接,所述机械臂控制器的输出端连接机械臂,底盘车控制器的输出端连接底盘车,云台控制器的输出端连接云台支架;所述总控制器连接安全区通信模块、正向隔离装置、无线通信模块。
10、作为本发明的进一步技术方案为,所述机械臂包括机械臂连接件、第一伸缩臂和第二伸缩臂,所述第一伸缩臂与机械臂连接件通过第一转轴连接,所述第一伸缩臂和第二伸缩臂通过第二转轴连接,所述第二伸缩臂的端部通过第三转轴与集成工具连接;所述第一伸缩臂和第二伸缩臂分别包括六个关节模块,所述关节模块通过驱动模块与主控制器连接。
11、作为本发明的进一步技术方案为,所述机械臂连接件上设置用于定位的3d相机。
12、作为本发明的进一步技术方案为,所述导航控制模块为激光slam+惯性的组合导航控制方法。
13、作为本发明的进一步技术方案为,所述摄像机为红外双目云台摄像机,用于智能巡检和红外检测。
14、作为本发明的进一步技术方案为,所述外壳的侧边还设置电源接口,所述电源接口与电源模块连接。
15、作为本发明的进一步技术方案为,所述外壳的侧边设置带有手柄的门体;所述外壳的一侧设置散热孔。
16、作为本发明的进一步技术方案为,所述安全区通信模块包括安全1区通信模块和安全2区通信模块,所述ⅰ区通信模块使用rs485方式与移动联动操作平台主控制器相连,使用iec61850 goose协议与通信箱内的ⅰ区交换机相连,接入ⅰ区网络;ⅱ区通信模块使用rs485方式与平台主控制器相连,使用iec61850 mms协议以太网方式通与通信箱内的ⅱ区交换机相连,接入ⅱ区网络;所述正向隔离装置通过以太网与平台主控制器相连。
17、作为本发明的进一步技术方案为,所述电源模块为可充电锂电池。
18、本发明的有益效果为:
19、1、本发明的底盘车负责移动导航和基本功能,机械臂及集成工具实现操作和检测功能,3d相机实现精准定位,红外双目云台实现智能巡检和红外检测。
20、2、外壳用于起到固定支撑的作用,同时外壳内部设置锂电池、总控制器、通过设置门体可实现支撑平台的维护,在门体上设置手柄,方便操作,通过设置电源接口可对锂电池进行充电,外壳上设置散热孔对外壳内外形成环境对流,实现外壳内部散热;
21、3、通过激光传感器和压力传感器对移动式电力智能联动平台进行避障,保证移动式电力智能联网平台的安全运行及移动。
技术特征:1.移动式电力智能联动操作平台,其特征在于,包括:
2.根据权利要求1所述的移动式电力智能联动操作平台,其特征在于,所述控制装置包括总控制器、云台控制器、机械臂控制器、底盘车控制器和i/o控制器,所述云台控制器、机械臂控制器、底盘车控制器和i/o控制器与总控制器连接,所述机械臂控制器的输出端连接机械臂,底盘车控制器的输出端连接底盘车,云台控制器的输出端连接云台支架;所述总控制器连接安全区通信模块、正向隔离装置、无线通信模块。
3.根据权利要求1所述的移动式电力智能联动操作平台,其特征在于,所述机械臂包括机械臂连接件、第一伸缩臂和第二伸缩臂,所述第一伸缩臂与机械臂连接件通过第一转轴连接,所述第一伸缩臂和第二伸缩臂通过第二转轴连接,所述第二伸缩臂的端部通过第三转轴与集成工具连接;所述第一伸缩臂和第二伸缩臂分别包括六个关节模块,所述关节模块通过驱动模块与主控制器连接。
4.根据权利要求3所述的移动式电力智能联动操作平台,其特征在于,所述机械臂连接件上设置用于定位的3d相机。
5.根据权利要求1所述的移动式电力智能联动操作平台,其特征在于,所述导航控制模块为激光slam+惯性的组合导航控制方法。
6.根据权利要求1所述的移动式电力智能联动操作平台,其特征在于,所述摄像机为红外双目云台摄像机,用于智能巡检和红外检测。
7.根据权利要求1所述的移动式电力智能联动操作平台,其特征在于,所述外壳的侧边还设置电源接口,所述电源接口与电源模块连接。
8.根据权利要求1所述的移动式电力智能联动操作平台,其特征在于,所述外壳的侧边设置带有手柄的门体;所述外壳的一侧设置散热孔。
9.根据权利要求1所述的移动式电力智能联动操作平台,其特征在于,所述安全区通信模块包括安全1区通信模块和安全2区通信模块,所述ⅰ区通信模块使用rs485方式与移动联动操作平台主控制器相连,使用iec61850 goose协议与通信箱内的ⅰ区交换机相连,接入ⅰ区网络;ⅱ区通信模块使用rs485方式与平台主控制器相连,使用iec61850 mms协议以太网方式通与通信箱内的ⅱ区交换机相连,接入ⅱ区网络;所述正向隔离装置通过以太网与平台主控制器相连。
10.根据权利要求1所述的移动式电力智能联动操作平台,其特征在于,所述电源模块为可充电锂电池。
技术总结本发明公开移动式电力智能联动操作平台,涉及电力维护技术领域,包括:底盘车、支撑平台和操作装置;所述底盘车包括底座、设置于底座下方的移动轮、以及设置于底座内部的导航控制模块,所述移动轮通过驱动杆与导航控制模块连接,所述底座的下方设置限位凸块;所述支撑平台包括外壳、控制装置、电源模块和通讯模块;所述外壳的底部设置于底盘车连接的凹槽,所述凹槽上设置转动盘,所述转动盘与导航控制模块连接,所述电源模块的输出端连接导航控制模块,所述控制装置连接导航控制模块;所述操作装置包括机械臂、用于安装电缆的电缆支架、以及用于安装监测装置的云台支架。本发明保证移动式电力智能联网平台的安全运行及移动。技术研发人员:孙伟,卢秋锦,张永宏,沈志伟,朱辉,土亚军受保护的技术使用者:国网新疆电力有限公司吐鲁番供电公司技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240730/197735.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。