基于执行器故障和传感器故障并存的分布容错控制方法
- 国知局
- 2024-07-31 23:28:03
本发明涉及故障控制,具体是基于执行器故障和传感器故障并存的分布容错控制方法。
背景技术:
1、随着工业设备越来越复杂,数控系统的非线性和耦合度也大大提高;在生产设备运行中,故障的发生不可避免,常见故障通常包括执行器故障和传感器故障,其中执行器故障发生频率更高、对生产设备性能影响更大,也更加难以解决;为了减少或避免故障带来的严重后果,容错控制也成了研究热点之一。
2、公开号cn110161851b的发明专利申请公开了一种航空电动燃油泵执行机构故障容错控制器设计方法,建立了电动燃油泵的数学模型;基于上述模型,建立混合非奇异快速终端滑模面,设计航空电动燃油泵系统执行机构故障观测器;一旦系统出现执行机构故障,能够基于观测器的估计值,重构控制律,实现对执行机构故障的容错控制;
3、但是,观测器的使用对系统模型以及系统参数存在依赖,模型的精确程度对观测器的观测结果会造成一定程度的影响,并且测量噪声也会使得观测器的观测结果产生一定的偏差;基于以上不足,本发明提出基于执行器故障和传感器故障并存的分布容错控制方法。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一;为此,本发明提出了基于执行器故障和传感器故障并存的分布容错控制方法,通过实时采集观测器的噪声信号进行信号干扰程度评估,以剔除信号质量较差条件下的突变异常结果值,有效提高测量精度和故障分析效率。
2、为实现上述目的,本发明的第一方面提供了基于执行器故障和传感器故障并存的分布容错控制方法,包括如下步骤:
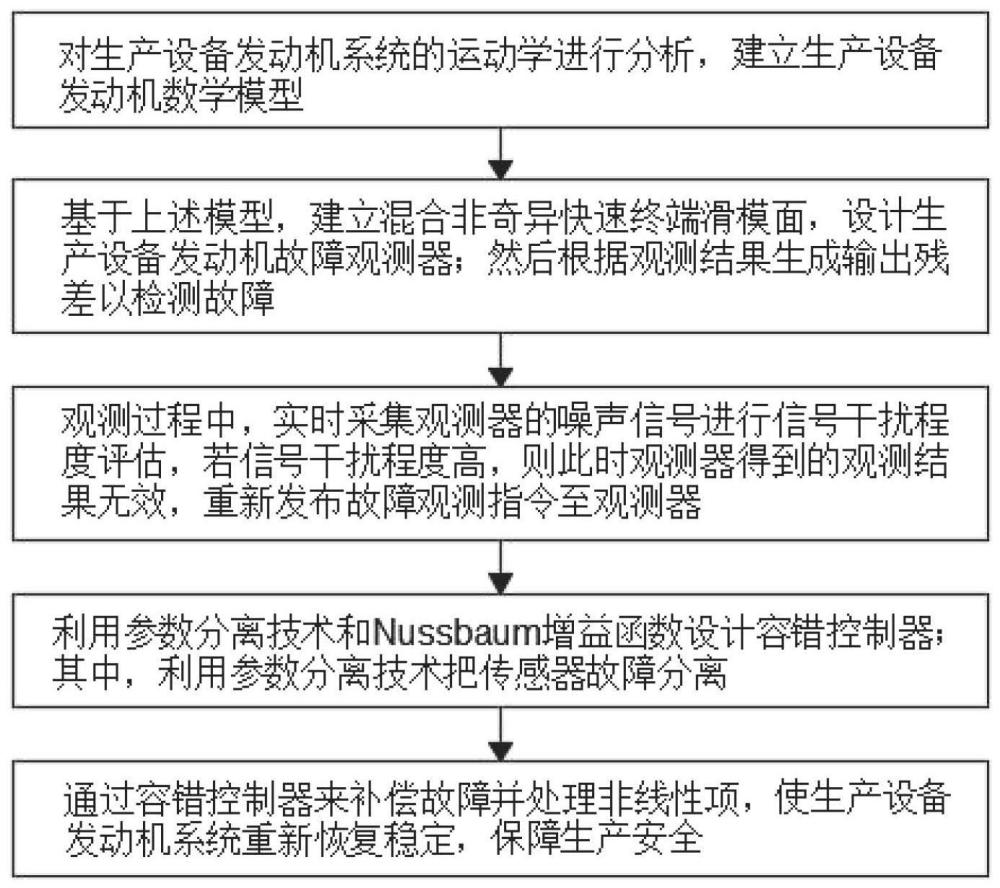
3、步骤一:对生产设备发动机系统的运动学进行分析,建立生产设备发动机数学模型;
4、步骤二:基于上述模型,建立混合非奇异快速终端滑模面,设计生产设备发动机故障观测器;然后根据观测结果生成输出残差以检测故障;
5、其中,当使用故障观测器进行观测时,实时采集观测器的噪声信号进行信号干扰程度评估,具体评估步骤如下:
6、将采集的噪声信号转化为数字信号,对转化后的数字信号进行滤波;
7、按照预设间隔时长采集对应数字信号的周期能量值,得到周期能量信息组wpi;根据采集到的i个周期能量值计算能量波峰阈值w1和能量波谷阈值w2;其中i≥10;
8、继续获取第i+1至第i+i个周期能量值,并标记为wpm,m=i+1,…,i+i;将wpm与能量波峰阈值w1和能量波谷阈值w2相比较;
9、若不存在周期能量值wpm<w2且至少有一个周期能量值wpm≥w1时,则表明信号干扰程度高,判定此时观测器得到的观测结果无效,重新发布故障观测指令至观测器;
10、步骤三:利用参数分离技术和nussbaum增益函数设计容错控制器;其中,利用参数分离技术把传感器故障分离;
11、步骤四:通过容错控制器来补偿故障并处理非线性项,使生产设备发动机系统重新恢复稳定,保障生产安全。
12、进一步地,生产设备发动机系统表示为:
13、
14、其中,x(t)∈rn为系统的状态,a为n维方阵,b为n×m为矩阵,c为n维方阵,u(t)∈rn为系统输入,并将输入设计为输出状态反馈的形式;m为控制输入维数,n为状态维数;
15、其中,u(t)=-ky(t);k为航空发动机控制器增益矩阵。
16、进一步地,当执行器发生故障时,生产设备发动机故障系统表示为:
17、
18、其中,执行器故障矩阵bf已知,且bft*bf为可逆矩阵;f用于表征故障系统标记。
19、进一步地,传感器故障模型如下:
20、
21、其中xi代表系统的状态向量,1≥ρi>0代表第i个状态量的效率系数,ηi≥0表示第i个状态发生的偏移故障;
22、当ρi=0和ηi=0时,代表传感器正常,没有故障。
23、进一步地,根据采集到的i个周期能量值计算能量波峰阈值w1和能量波谷阈值w2;具体为:
24、计算i个周期能量值的平均值为wpavg;其中周期能量值是指对接收到的连续多个比特位数据的能量进行累加并求平均所得到的值;
25、遍历周期能量信息组wpi,将周期能量值最大值标记为wpmax,将周期能量值最小值标记为wpmin;
26、利用公式w1=wpmax+(wpmax-wpavg)×f计算得到能量波峰阈值w1;利用公式w2=wpmin-(wpavg-wpmin)×f计算得到能量波谷阈值w2;其中f为预设预警阈值。
27、进一步地,若不存在周期能量值wpm≥w1且至少有一个周期能量值<w2时,则表明信号干扰程度低,此时观测器得到的观测结果有效;
28、其余情况,则表明信号干扰程度一般,需要对观测器进行多轮判断。
29、进一步地,其中,多轮判断方法如下:
30、指定识别判断次数,对观测器的信号干扰程度多次识别判断,每次判断中间间隔固定时间;固定时间由管理员预设;
31、当有一次为高度识别即返回观测结果无效;当有一次为低度识别即返回观测结果有效;若多次识别均为一般识别即返回观测结果有效;
32、其中,高度识别是指信号干扰程度高,低度识别是指信号干扰程度低,一般识别是指信号干扰程度一般。
33、与现有技术相比,本发明的有益效果是:
34、1、本发明中通过对生产设备发动机系统的运动学进行分析,建立生产设备发动机数学模型;基于上述模型,建立混合非奇异快速终端滑模面,设计生产设备发动机故障观测器,能够在线、无抖振、无相位滞后地检测出故障,利用参数分离技术和nussbaum增益函数设计容错控制器;然后通过容错控制器来补偿故障并处理非线性项,使生产设备发动机系统重新恢复稳定,保障生产安全;
35、2、本发明中当使用故障观测器进行观测时,实时采集观测器的噪声信号进行信号干扰程度评估,若信号干扰程度高,此时观测器得到的观测结果无效,重新发布故障观测指令至观测器,以剔除信号质量较差条件下的突变异常结果值,提高故障分析精度和效率;若信号干扰程度一般,则对观测器进行多轮判断,通过对观测器进行多次检测识别配合逻辑判断的方式,减少观测器的误识别问题,以提高观测器的测量精度。
技术特征:1.基于执行器故障和传感器故障并存的分布容错控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的基于执行器故障和传感器故障并存的分布容错控制方法,其特征在于,生产设备发动机系统表示为:
3.根据权利要求2所述的基于执行器故障和传感器故障并存的分布容错控制方法,其特征在于,当执行器发生故障时,生产设备发动机故障系统表示为:
4.根据权利要求2所述的基于执行器故障和传感器故障并存的分布容错控制方法,其特征在于,传感器故障模型如下:
5.根据权利要求1所述的基于执行器故障和传感器故障并存的分布容错控制方法,其特征在于,根据采集到的i个周期能量值计算能量波峰阈值w1和能量波谷阈值w2;具体为:
6.根据权利要求1所述的基于执行器故障和传感器故障并存的分布容错控制方法,其特征在于,若不存在周期能量值wpm≥w1且至少有一个周期能量值<w2时,则表明信号干扰程度低,此时观测器得到的观测结果有效;其余情况,则表明信号干扰程度一般,需要对观测器进行多轮判断。
7.根据权利要求6所述的基于执行器故障和传感器故障并存的分布容错控制方法,其特征在于,其中,多轮判断方法如下:
技术总结本发明公开了基于执行器故障和传感器故障并存的分布容错控制方法,涉及故障控制技术领域;解决了测量噪声使得观测器的观测结果产生偏差的技术问题;包括:对生产设备发动机系统的运动学进行分析,建立生产设备发动机数学模型;建立混合非奇异快速终端滑模面,设计生产设备发动机故障观测器生成输出残差以检测故障;观测过程中,实时采集观测器的噪声信号进行信号干扰程度评估,若信号干扰程度高,则此时观测器得到的观测结果无效,重新发布故障观测指令至观测器,提高测量精度;利用参数分离技术和Nussbaum增益函数设计容错控制器;通过容错控制器来补偿故障并处理非线性项,使生产设备发动机系统重新恢复稳定,保障生产安全。技术研发人员:赵磊,胡松,陈佩军,李宇欢受保护的技术使用者:黄山学院技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240730/197733.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表