两种改进的无穷大零点单位负反馈系统稳定方法与流程
- 国知局
- 2024-07-31 23:28:00
本发明属于线性系统控制领域,涉及线性系统稳定性研究,更具体来说涉及两种改进的无穷大零点单位负反馈系统稳定方法。
背景技术:
1、通过稳定控制器来稳定给定系统是一个重要问题,它已在各论文刊物中得到广泛研究。目前比较普遍的方法有逐步插值法,以及通过解决辅助h∞控制问题来解决。然而许多方法过程繁琐,且稳定控制器的阶数可能非常大,这具体取决于控制对象的右半平面零极点模式,这将导致控制器更为复杂,从而使得稳定后的系统更加复杂。因此系统的降阶稳定控制器一直是重要的研究对象。在某些充分条件下,通过求解单块h∞控制问题,可以获得与被控对象同阶且满足预先指定的h∞范数界的稳定控制器。
2、阶数越低,稳定控制器的设计越有挑战性,尤其是阶数低于被控对象的控制器。而阶数比被控对象更低的稳定控制器也越来越被需要和重视。同时,稳定控制器算法的通用性和计算速度也十分关键。因此,设计一种简单、高效、快速的低阶稳定控制器算法尤为重要。
技术实现思路
1、发明的目的之一在于提供通用的系统稳定方法,以此快速计算出能使一类系统稳定的控制器函数,且控制器的阶数值在较低范围内。
2、为实现上述目的,本发明提供技术方案如下:
3、两种改进的无穷大零点单位负反馈系统稳定方法,包括以下步骤:
4、步骤1,确定系统中控制对象的函数
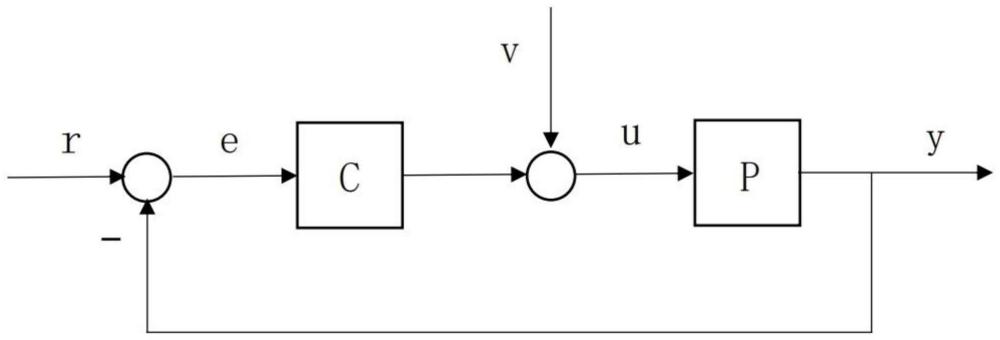
5、步骤2,设置控制器c位置如图1;
6、步骤3,确定参数d和n;
7、步骤4,判断p的参数q范围;
8、步骤5,根据q的范围,通过范数计算确定参数α和β范围,选取范围内任意一个α值和β值;
9、步骤6,利用q和α等参数求解得到能够稳定系统的稳定控制器函数cs1;
10、步骤7,利用q、β、d和n等参数求解得到另一种稳定控制器函数cs2。
11、优选地,所述函数p有无穷大的零点,d和n是首一多项式,d的阶数不小于n的阶数。
12、优选地,所述参数其中θ为任意的首一赫尔维茨多项式,且满足θ的阶数等于d的阶数,可以选择p在左半复平面上的极点设置为θ的根。
13、优选地,所述参数q=deg(d)-deg(n)-1,q≥0,其中,deg(d)为p的分母的阶数,deg(n)为p的分子的阶数。
14、优选地,所述的确定参数α和β范围包括以下步骤:
15、步骤5.1,若q=0,则α∈r+;若q>0,则执行步骤5.2;
16、步骤5.2,
17、优选地,所述的范数||·||计算方法为:
18、对于g∈h∞,其中h∞为c+上所有有界解析函数的集合。
19、优选地,所述的多项式χ为任意的q阶首一赫尔维茨多项式。
20、优选地,第一种求解稳定控制器cs的方法步骤如下:
21、步骤6.1,若q=0,则cs1=α;若q>0,则执行步骤6.2;
22、步骤6.2,
23、优选地,第一种求解稳定控制器cs的方法得到的cs阶数等于q。
24、优选地,第二种求解稳定控制器cs的方法步骤如下:
25、步骤7.1,若q=0,若q>0,则执行步骤7.2;
26、步骤7.2,
27、优选地,第二种求解稳定控制器cs的方法得到的cs阶数等于deg(d)-1。
28、与现有技术相比,本发明有益效果为:
29、本发明针对包含无穷大零点的单位负反馈系统,通过几种简单的参数运算,快速计算出能够稳定系统的控制器函数,可保证计算效率的同时降低控制器函数的阶数,且阶数值为低于被控对象阶数的确定值,减少了控制器复杂度。
技术特征:1.两种改进的无穷大零点单位负反馈系统稳定方法,其特征在于,包括以下步骤:
2.如权利要求1所述的两种改进的无穷大零点单位负反馈系统稳定方法,其特征在于,所述函数p有无穷大的零点,d和n是首一多项式,d的阶数不小于n的阶数。
3.如权利要求1所述的两种改进的无穷大零点单位负反馈系统稳定方法,其特征在于,所述参数其中θ为任意的首一赫尔维茨多项式,且满足θ的阶数等于d的阶数,可以选择p在左半复平面上的极点设置为θ的根。
4.如权利要求1所述的两种改进的无穷大零点单位负反馈系统稳定方法,其特征在于,所述参数q=deg(d)-deg(n)-1,q≥0,其中,deg(d)为p的分母的阶数,deg(n)为p的分子的阶数。
5.如权利要求1所述的两种改进的无穷大零点单位负反馈系统稳定方法,其特征在于,所述的确定参数α和β范围包括以下步骤:
6.如权利要求5所述的两种改进的无穷大零点单位负反馈系统稳定方法,其特征在于,所述的范数||·||计算方法为:
7.如权利要求1所述的两种改进的无穷大零点单位负反馈系统稳定方法,其特征在于,第一种求解稳定控制器cs的方法步骤如下:
8.如权利要求7所述的两种改进的无穷大零点单位负反馈系统稳定方法,其特征在于,第一种求解稳定控制器cs的方法得到的cs阶数等于q。
9.如权利要求1所述的两种改进的无穷大零点单位负反馈系统稳定方法,其特征在于,第二种求解稳定控制器cs的方法步骤如下:
10.如权利要求9所述的两种改进的无穷大零点单位负反馈系统稳定方法,其特征在于,第二种求解稳定控制器cs的方法得到的cs阶数等于deg(d)-1。
技术总结本发明公开了两种改进的无穷大零点单位负反馈系统稳定方法,包括以下步骤,步骤1,确定系统中控制对象的函数步骤2,设置控制器C位置如图1;步骤3,确定参数D和N;步骤4,判断P的参数q范围;步骤5,根据q的范围,通过范数计算确定参数α和β范围,选取范围内任意一个α值和β值;步骤6,利用q和α等参数求解得到能够稳定系统的稳定控制器函数Cs<subgt;1</subgt;;步骤7,利用q、β、D和N等参数求解得到另一种稳定控制器函数Cs<subgt;2</subgt;。本发明不用考虑控制对象的极点,仅考虑控制对象的零点,且只引入几个参数,通过几个简单的数学计算和设计步骤,可保证简单快速地构建使系统稳定的控制器。技术研发人员:葛晨昊,孟雷,叶涛,杨天开,张凯岳受保护的技术使用者:中国船舶集团有限公司第七一五研究所技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240730/197726.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表