三维空间中无人机最短路径规划方法与流程
- 国知局
- 2024-07-31 23:27:56
本发明属于无人机飞行路径规划,具体涉及三维空间中无人机最短路径规划方法。
背景技术:
1、随着无人机技术的发展,无人机三维路径规划受到人们越来越多的关注,路径规划方法在合理利用无人机能源和效能分配方面起着至关重要的作用。路径规划问题是指在已知环境信息的任务场景中,预先规划出从无人机起始点到对应目标点,可以绕过途中各种威胁区和障碍物,安全,可靠,且同时满足无人机自身约束条件的可飞行路径,是任务规划系统研究的难点之一。已有的无人机路径规划方法大多将路径规划归类为最优化问题,在已知起点、终点和障碍或威胁的空间中规划出路径最短或任务效能最高的路径,这些路径规划方法大体可分类为局部最优路径规划方法和全局最优路径规划方法。利用局部最优思想的路径规划方法有人工势场法和速度障碍法等,利用全局最优思想的路径规划方法有遗传算法、蚁群算法和粒子群算法等。但现有路径规划方法在处理最短路径规划问题过程中可能陷入局部最优而无法寻到全局最优解的问题。
技术实现思路
1、针对现有路径规划方法在处理最短路径规划问题过程中可能陷入局部最优而无法寻到全局最优解的问题,本发明的目的设计一种三维空间中无人机最短路径规划方法,所述方法能够在避开三维环境障碍和威胁的同时寻找到从给定起始点到目标点的最短路径。
2、为实现本发明目的,本发明提供的三维空间中无人机最短路径规划方法采取技术方案如下:
3、所述方法包括如下步骤:
4、步骤1.随机生成m条路径,第i条路径点集合为si={p(i,1),p(i,2),…,p(i,n)},其中m≥2,n>3,p(i,1)为起始点,p(i,n)为目标点;
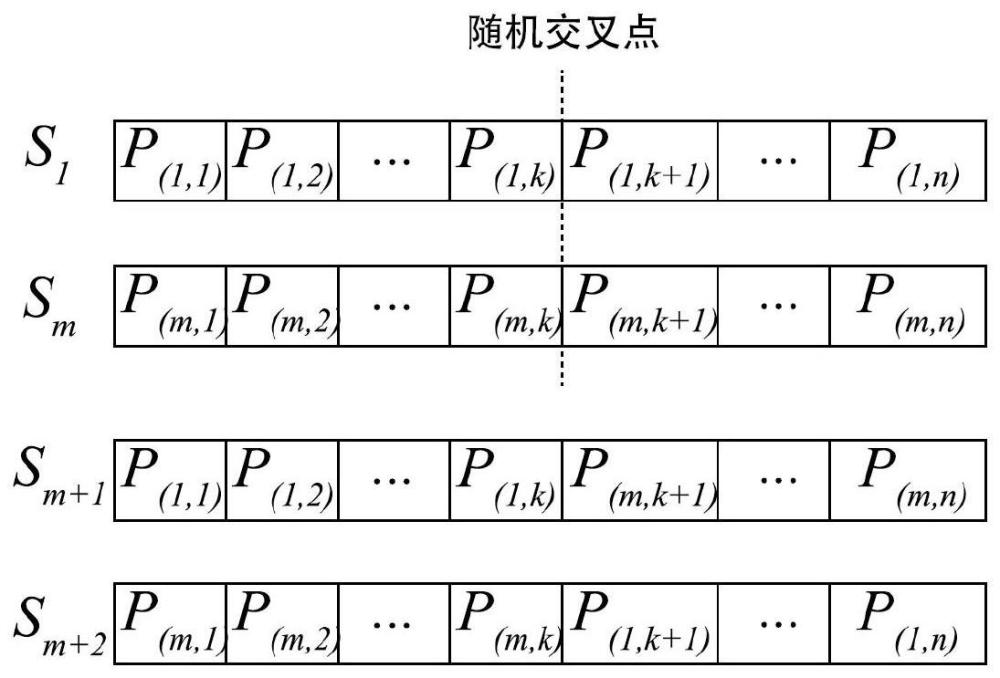
5、步骤2.在m条路径中,分别两两相交叉,方法为:依次选取第1条和第m条、第2条和第m-1条、第3条和第m-2条,......,直到所有的路径集合均完成路径相交叉,两条路径相交叉时,随机选择一个路径点进行所述路径点后的路径点交换形成两条新路径,新生成的m条路径点集合与原路径点集合共同组成2m条路径点集合;
6、步骤3.依次对所述步骤2形成的2m条路径点进行收敛计算,获得长度收敛的2m条优化路径;
7、收敛计算过程中,依次对每条路径上的路径节点进行判断,对于路径上任意节点p(i,j)(j=2,3,…,n-1),若该节点与三维环境的距离大于滑动安全值d,执行路径点收敛计算,若该节点与三维环境的距离小于滑动安全值d,则该路径点执行滑动计算,发生滑动作用;
8、步骤4.分别计算各个路径点集合的路径长度,选取其中长度短的m条路径集合,返回步骤2迭代计算,直至满足计算停止条件停止计算,选取最终m条路径中路径长度最短的路径为生成路径。
9、进一步的,路径点收敛计算方法为:
10、假设在路径点p(i,j)运动时,其相邻点p(i,j-1)和p(i,j+1)固定,路径点p(i,j)受到相邻点的吸引作用,方向为由此可得
11、
12、其中为点p(i,j)的位移矢量,k∈(0,1)为比例系数。
13、进一步的,滑动计算方法为:
14、
15、a,b,c分别为障碍表面网格的三个顶点,以δabc近似表示障碍表面与路径节点发生作用的表面,表示平面abc的单位法向量,方向指向障碍物外,表示在路径点收缩作用下,路径点平行于平面abc的移动分量。
16、本发明的有益效果:
17、本发明提出一种已知三维空间中最短路径规划方法,提出了一种路径规划的新方法,该方法具有收敛性,并且路径收敛的极限长度为所求最短路径长度。本发明相对于其他路径规划方法,运算量小,计算速度快。本发明采用路径点控制的方式,所生成的路径具有平滑性好的特点。本发明考虑到了三维空间中的环境障碍,可以满足无人机的实际应用需求。
技术特征:1.三维空间中无人机最短路径规划方法,其特征在于,所述方法包括如下步骤:
2.根据权利要求1所述的三维空间中无人机最短路径规划方法,其特征在于,路径点收敛计算方法为:
3.根据权利要求1或2所述的三维空间中无人机最短路径规划方法,其特征在于,滑动计算方法为:
技术总结本发明公开了三维空间中无人机最短路径规划方法,所述方法包括:随机生成m条路径,分别两两相交叉,共同组成2m条路径点集合;依次对形成的2m条路径点进行收敛计算,获得长度收敛的2m条优化路径;依次对每条路径上的路径节点与三维环境的距离大于滑动安全值d进行判断,若小于滑动安全值d执行滑动计算,发生滑动作用;选取其中长度短的m条路径集合,进行迭代计算,直至满足计算停止条件停止计算,选取最终m条路径中路径长度最短的路径为生成路径。本发明在给定无人机飞行三维环境的前提下,生成从无人机起始位置到达目标点的最短三维路径,保证无人机从起始位置出发在避开三维障碍的同时以最短的路径抵达给定目标点。技术研发人员:田景凡,陈小刚,孙晓旭,巩轶男,马洪忠受保护的技术使用者:海鹰航空通用装备有限责任公司技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240730/197717.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种新型控制箱的制作方法
下一篇
返回列表