-
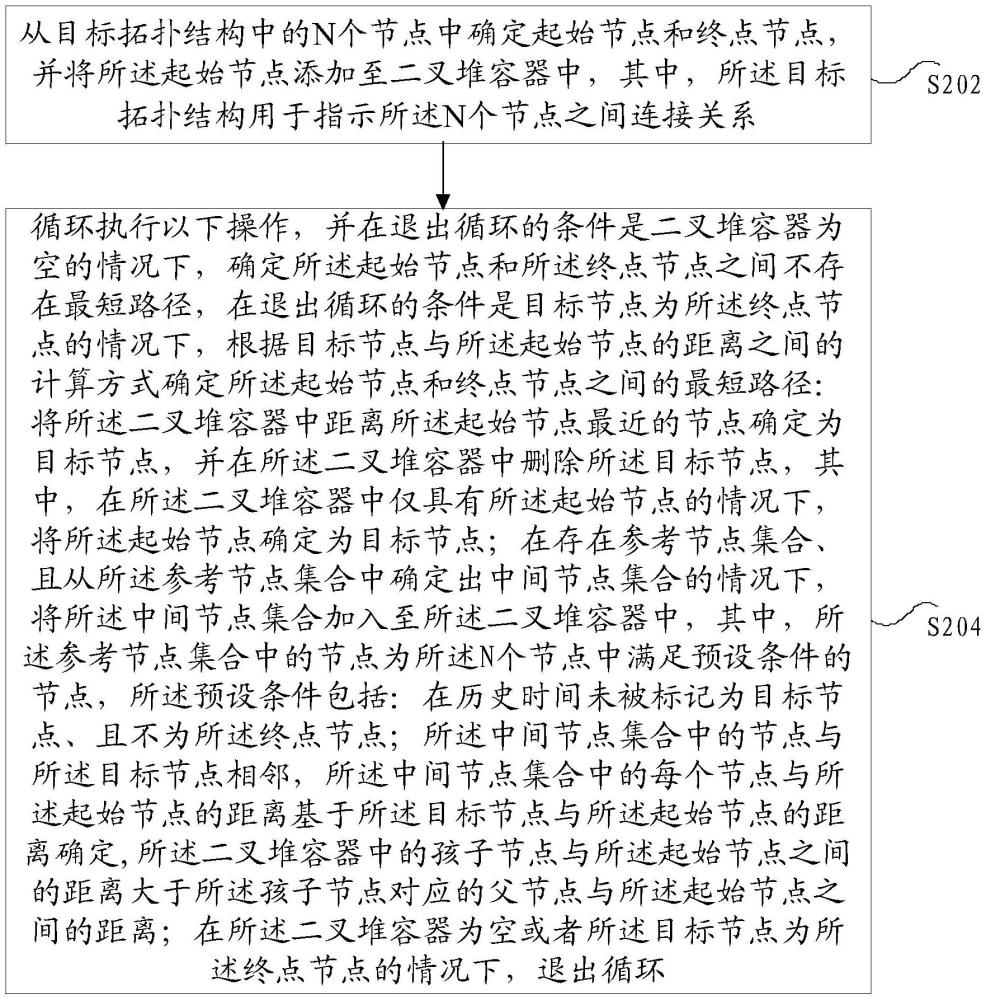
最短路径的确定方法和装置、存储介质、电子装置、计算机程序产品与流程
本技术涉及计算机领域,具体而言,涉及一种最短路径的确定方法和装置、存储介质、电子装置、计算机程序产品。背景技术:1、在汽车计算流体动力学(computational fluid dynamics,简称......
-
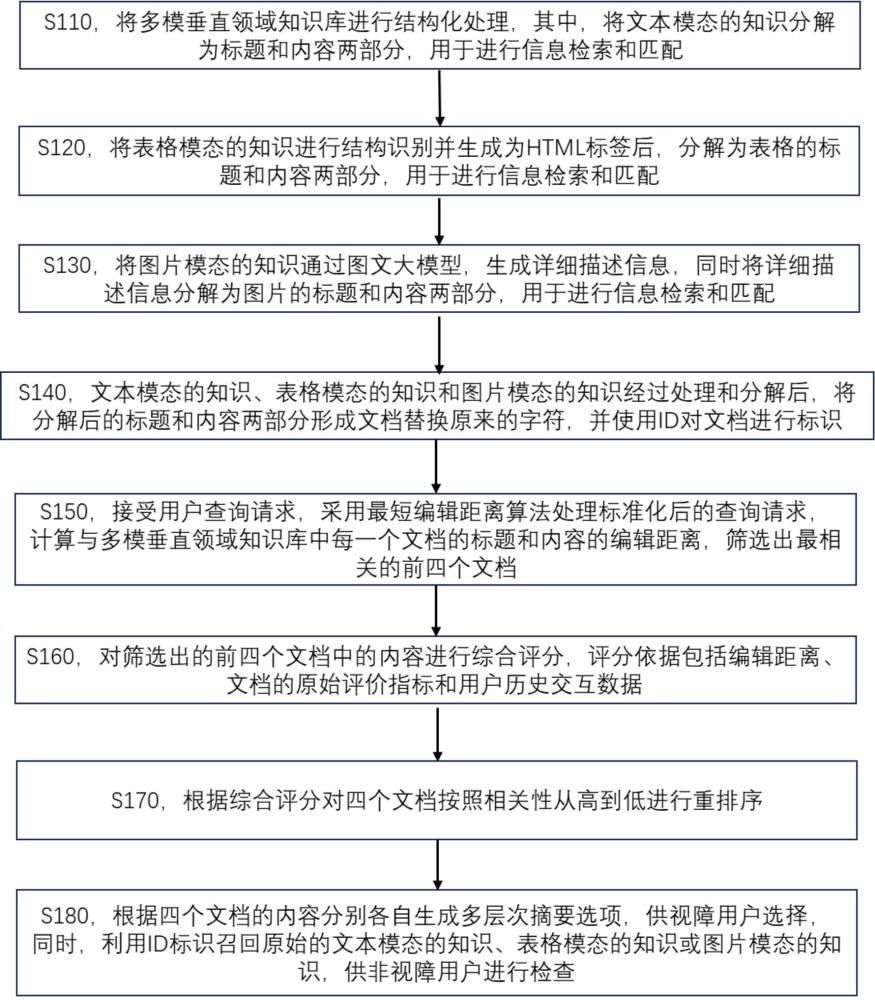
基于最短编辑距离的视障人群的多模垂直领域知识问答方法与流程
本发明涉及人工智能技术在助盲教育领域的应用,尤其涉及基于最短编辑距离的视障人群的多模垂直领域知识问答方法。背景技术:1、在当前数字信息时代,视障人群对信息技术的依赖日益增长,尤其是在特定的垂直领域知识......
-
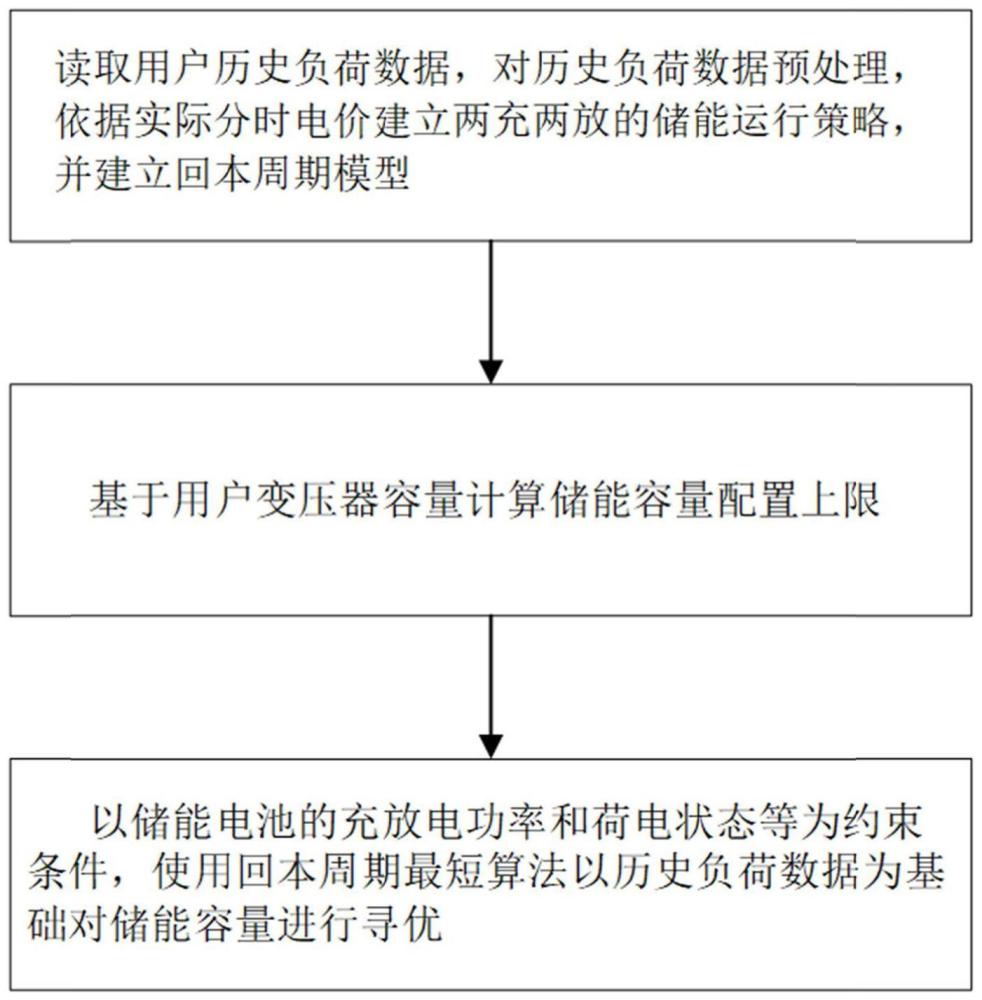
基于历史负荷数据的回本周期最短储能优化配置算法的制作方法
本发明属于储能容量配置,具体涉及基于历史负荷数据的回本周期最短储能优化配置算法。背景技术:1、风能、太阳能等新型能源得到了快速的发展。然而新能源发电存在随机性和波动性等问题,不利于电力系统的稳定运行,......
-
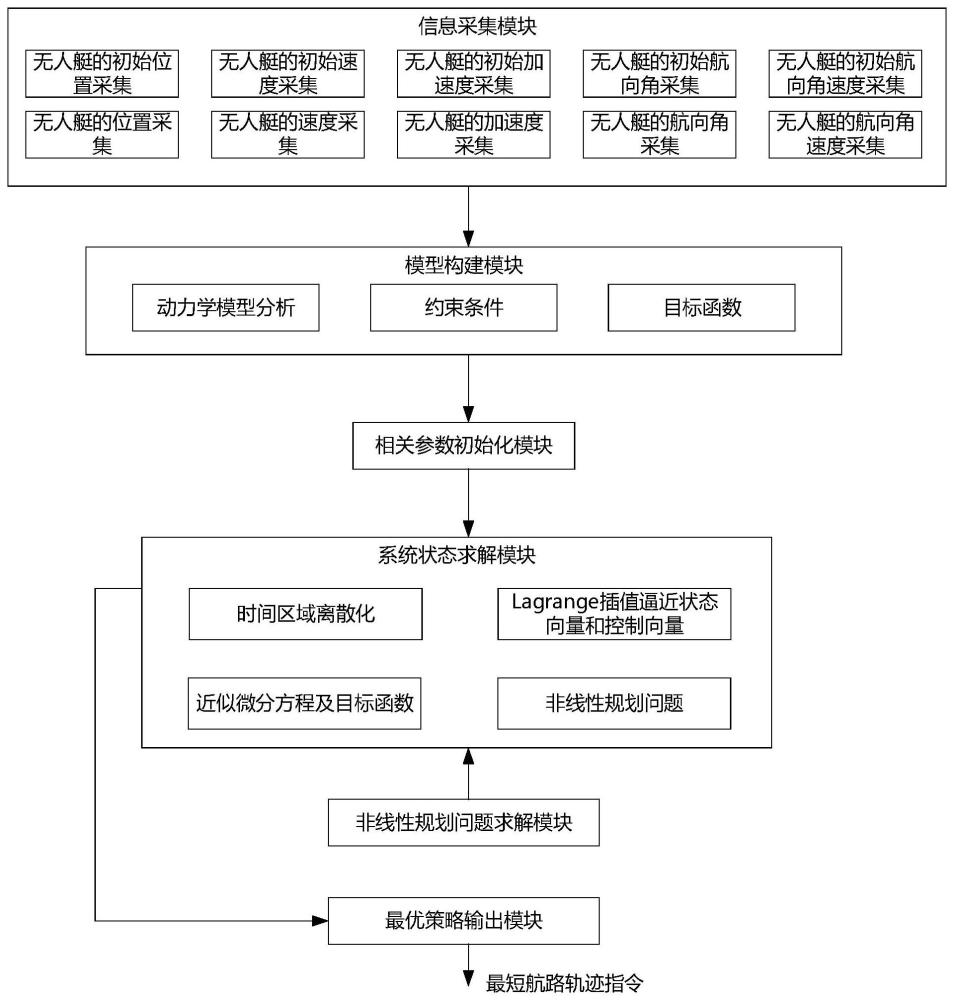
一种基于正交配置的无人艇最短航路优化方法及系统与流程
本发明属于无人艇自主决策,更具体地,涉及一种基于正交配置的无人艇最短航路优化方法及系统。背景技术:1、随着无人化技术的发展,无人平台的自主智能化水平也在不断提高,无人艇航路规划作为无人化领域的热门研究......
-
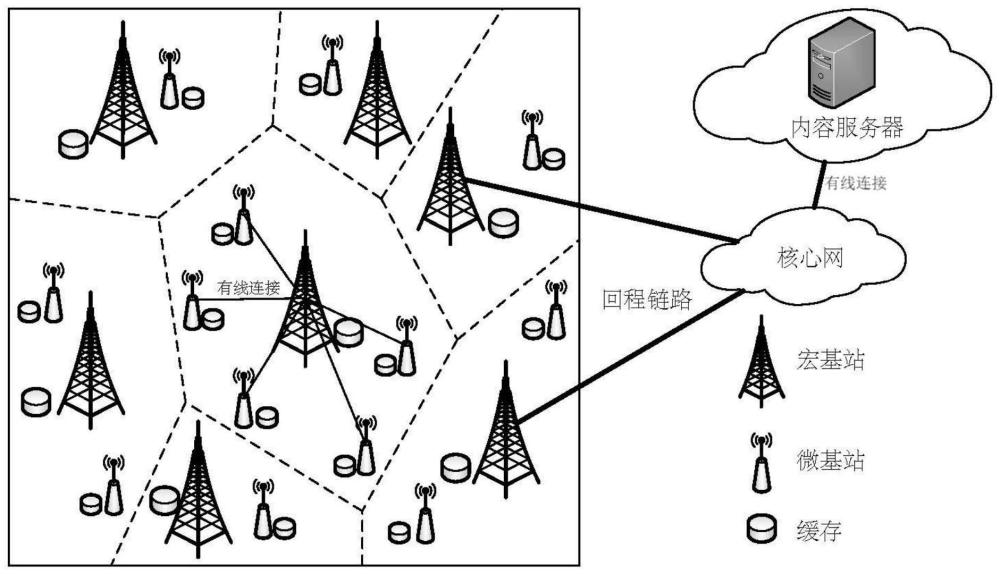
一种大规模异构网络中基于协作边缘缓存的最短时延传输方法
本发明涉及一种在大规模异构网络中,宏基站和微基站依照一定的概率协作缓存文件库中的相应文件,并实现最短时延的下行传输方法,属于无线通信、边缘缓存和异构网络研究。背景技术:1、海量设备互联及用户的沉浸式体......
-
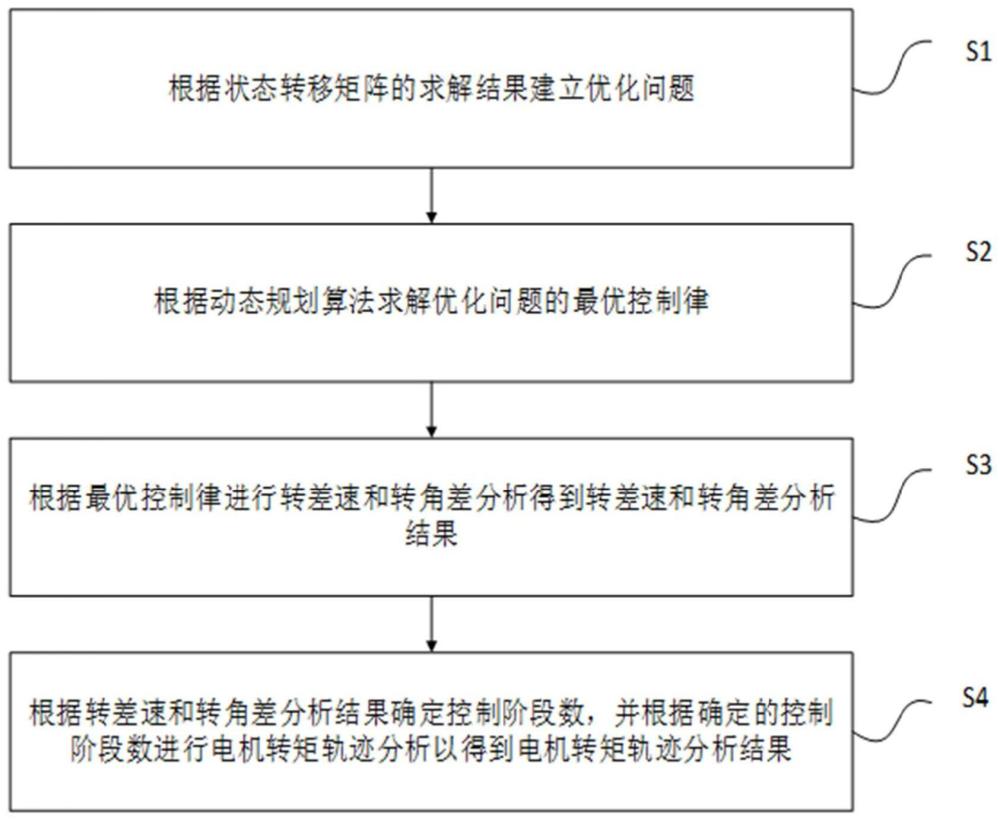
换档过程中转速同步转角对齐时间最短控制律求解方法
本发明涉及电动车辆的驱动传动系统,特别是涉及换档过程中转速同步转角对齐时间最短控制律求解方法。背景技术:1、低碳目标是国家发展的重要战略决策。重型商用车在交通运输碳排放中占有很大比重,实现重型商用车电......
-
三维空间中无人机最短路径规划方法与流程
本发明属于无人机飞行路径规划,具体涉及三维空间中无人机最短路径规划方法。背景技术:1、随着无人机技术的发展,无人机三维路径规划受到人们越来越多的关注,路径规划方法在合理利用无人机能源和效能分配方面起着......
技术新讯 > 最短 > 列表
 2024-09-14
2024-09-14精选技术
-

用于T梁转运的装置及方法与流程
2024-08-02 -

电流互感器的性能评估方法及系统与流程
2024-09-14 -

小数据传输失败报告的制作方法
2024-10-15 -

一种河道工程用河道清淤搅动装置的制作方法
2024-07-09 -

调控叶轮组的制作方法
2024-07-30 -

一种数据丢失情况下无人水面航行器的航向控制方法
2024-08-01 -

吊架及空铁交通系统的制作方法
2024-08-01 -

一种高低压气瓶组合的氮气推进系统的制作方法
2024-08-01 -
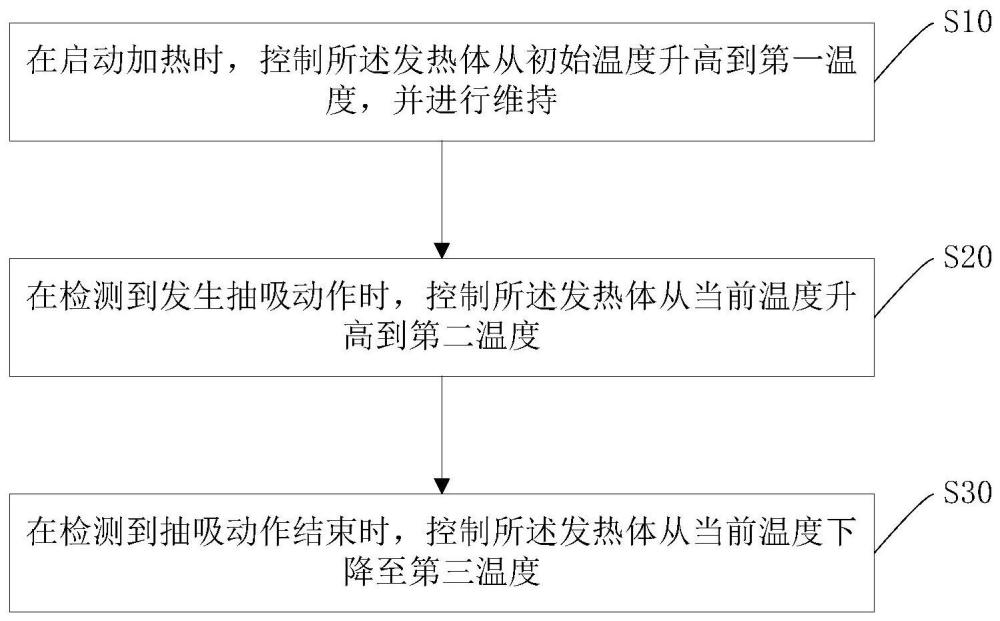
发热体、加热不燃烧装置及其加热控制方法与流程
2024-11-19 -

一种船体上层建筑分段建造工艺的制作方法
2024-08-01