一种基于物联网的智能制造设备群的故障分析及嗅探系统的制作方法
- 国知局
- 2024-07-31 23:28:02
本发明涉及数据分析,具体涉及一种基于物联网的智能制造设备群的故障分析及嗅探系统。
背景技术:
1、智能制造是一种基于信息技术和自动化技术的制造业模式,旨在实现生产过程的智能化、高效化和优化。
2、智能制造的目标是提高生产效率、降低成本、提高产品质量,并实现制造业的可持续发展。通过智能化的生产过程,企业可以更好地管理生产流程、优化资源利用、减少浪费,并快速响应市场需求的变化。
3、然而,在智能制造设备执行生产任务的过程中,虽能够最大限度自动化的完成生产,但智能制造设备的维护目前仍然主要依靠人工定期巡检,由于智能制造设备往往由大量的设备联动运行来实现生产,这导致对智能制造设备的巡检耗用的人工成本较大,且效率较低,无法快捷的对智能制造设备中各设备进行全面维护。
技术实现思路
1、针对现有技术所存在的上述缺点,本发明提供了一种基于物联网的智能制造设备群的故障分析及嗅探系统,解决了上述背景技术中提出的技术问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:
3、一种基于物联网的智能制造设备群的故障分析及嗅探系统,包括:
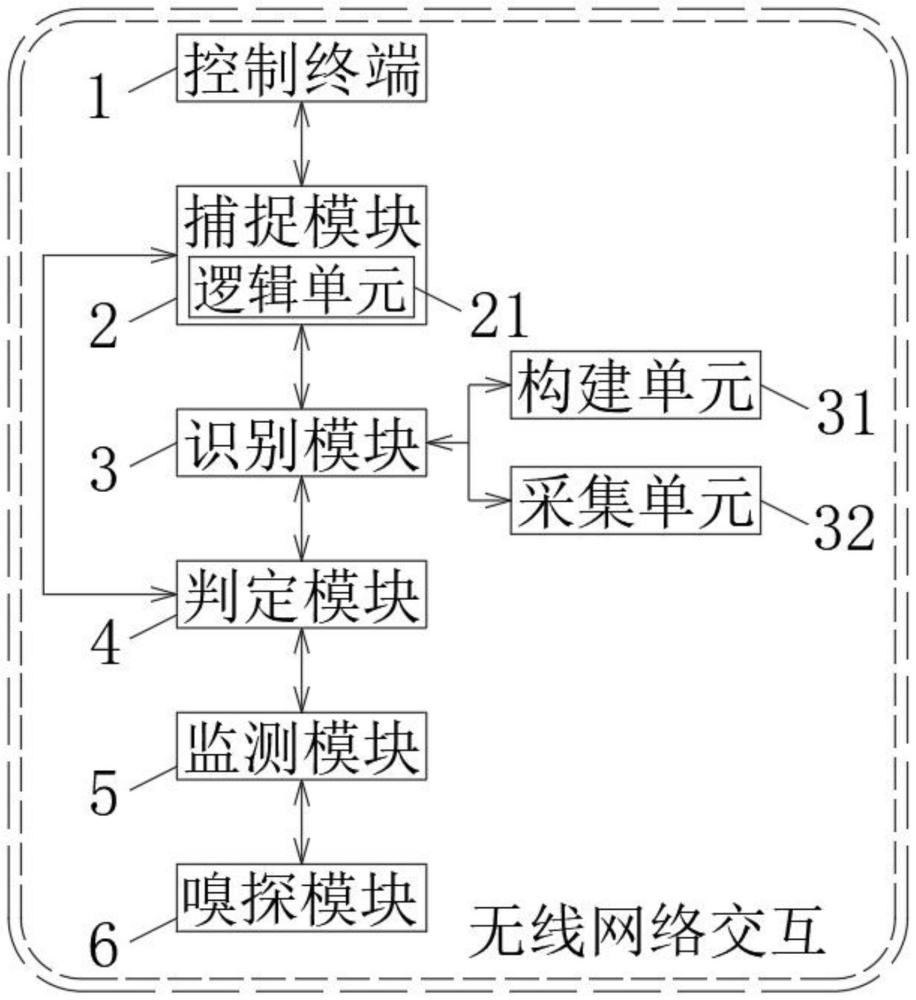
4、控制终端,是系统的主控端,用于发出执行命令;捕捉模块,用于捕捉设备群制造产品成品的图像数据;识别模块,用于接收捕捉模块中捕捉的产品成品图像数据,基于产品成品图像数据识别产品成品图像数据来源产品成品,与标准产品成品差异性;判定模块,用于获取识别模块中识别到的产品成品图像数据来源产品成品与标准产品成品的差异性,基于差异性识别结果判定设备群是否存在故障;监测模块,用于监测设备群中各组设备的运行动态信息;嗅探模块,用于接收监测模块中监测到的设备群中各组设备的运行动态信息,基于设备运行动态信息嗅探存在故障的设备群中设备;
5、所述控制终端通过无线网络交互连接有捕捉模块,所述捕捉模块内部通过介质电性连接有逻辑单元,所述捕捉模块通过无线网络交互连接有识别模块,所述识别模块下级通过无线网络交互连接有构建单元及采集单元,所述识别模块通过无线网络交互连接有判定模块、监测模块及嗅探模块,所述判定模块通过无线网络与捕捉模块交互连接。
6、更进一步地,所述捕捉模块由若干组摄像头组成,若干组摄像头呈等距状环绕于设备群输出产品成品出口的周围,所述捕捉模块内部设置有子模块,包括:
7、逻辑单元,用于设定捕捉模块运行逻辑,控制捕捉模块基于逻辑单元中设定的运行逻辑运行,捕捉设备群制造产品成品的图像数据;
8、其中,逻辑单元中设定的捕捉模块运行逻辑为:捕捉模块运行捕捉的产品成品图像数据不少于两组,任意两组产品成品图像数据中包含的产品成品表面相同区域不大于产品成品图像数据整幅的百分之四十,设备群运行连续输出产品成品,捕捉模块基于指定周期对设备群连续输出的产品成品进行不同目标的图像数据捕捉。
9、更进一步地,所述识别模块下级设置有子模块,包括:
10、构建单元,用于上传产品成品规格参数,基于产品成品规格参数构建产品成品虚拟三维模型;
11、采集单元,用于接收构建单元中构建的产品成品虚拟三维模型,基于产品成品图像数据于捕捉模块中的捕捉视角,于产品成品虚拟三维模型上采集相同视角下的模型图像;
12、其中,所述采集模块中采集到的模型图像实时向识别模块反馈,识别模块基于模型图像数据与产品成品图像数据进行差异性比对,差异性比对结果记作:产品成品图像数据来源产品成品与标准产品成品差异性识别结果。
13、更进一步地,所述识别模块中产品成品图像数据来源产品成品与标准产品成品的差异性识别逻辑表示为:
14、
15、式中:dis为产品成品图像数据来源产品成品与标准产品成品的差异性表现值;u为模型图像数据与产品成品图像数据来源视角的集合;n为第v组来源视角下产品成品图像数据中产品成品轮廓图像;li为产品成品轮廓图像上第i组特征点到其最近相邻特征点的距离;ai为产品成品轮廓图像上第i组特征点所在位置的角度;m为第v组来源视角下模型图像数据的模型轮廓图像;lj为模型轮廓图像上第j组特征点到其最近相邻特征点的距离;aj为模型轮廓图像上第j组特征点所在位置的角度;为第v组来源视角下模型图像数据与产品成品图像数据相似性;σ为修正指数;u0为来源视角的数量;
16、其中,dis的值越大,表示产品成品图像数据来源产品成品的合格概率越低,反之,则表示产品成品图像数据来源产品成品的合格概率越高;
17、修正指数σ取值为1或-1,时,修正指数σ=-1,时,修正指数σ=1;
18、在轮廓图像的图像轮廓上拾取若干组像素点,基于所有拾取的像素点,相邻相互连接,以组成由笔直线段构成的与轮廓图像拟合的封闭图形,封闭图形组成线段的各端点均记作轮廓图像上特征点;
19、其中,与轮廓图像拟合的封闭图形的拟合判定为sim(a,b)≥90%,sim(a,b)表示封闭图形与轮廓图像基于轮廓层面的相似度,sim(a,b)<90%时,添加在轮廓图像的图像轮廓上拾取的像素点数量,sim(a,b)的值越大,求取的dis精度越佳,反之,求取的dis精度越差。
20、更进一步地,所述判定模块运行连续获取的获取差异性识别结果,在获取到差异性识别结果不少于三组时,以最新获取的三组差异性识别结果判定设备群是否存在故障;
21、所述判定模块中设备群故障判定逻辑表示:
22、dis1<dis2<dis3;
23、式中:dis1、dis2、dis3表示判定模块运行获取的最新的三组差异性识别结果,dis3表示判定模块最新获取的一组差异性识别结果,dis2表示基于dis3上一次获取的一组差异性识别结果,dis1表示基于dis2上一次获取的一组差异性识别结果;
24、其中,dis1<dis2<dis3成立,则表示判定模块判定结果为是,反之,则表示,判定模块判定结果为否,判定模块判定结果为否时,跳转捕捉模块运行。
25、更进一步地,所述监测模块运行实时接收判定模块中判定结果,在判定模块判定结果为是时,触发执行设备群中各组设备运行动态信息的监测操作;
26、其中,监测模块监测的设备群中各组设备的运行动态信息,即设备运行振动频谱。
27、更进一步地,所述嗅探模块中故障设备嗅探逻辑表示为:
28、logic1:接收设备运行振动频谱,以产品于设备中处理耗用时间作为时间窗口对设备运行振动频谱进行分割;
29、logic2:对分割得到的各时间窗口中设备运行振动子频谱进行相似性评估;
30、logic3:对logic2中各组相似性评估结果进行求和,进一步对求和结果进行求均,设定故障判定阈值;
31、logic4:对logic3中求均结果与故障判定阈值进行比对,求均结果处于故障判定阈值内,且logic3中求均结果大于,第一组时间窗口对应设备运行振动子频谱与最后一组时间窗口对应设备运行振动子频谱的相似性时,设备运行振动频谱来源设备判定为故障设备;
32、其中,logic4中两组判定逻辑,满足任意一组时,嗅探模块向控制终端反馈设备的运行振动频谱,系统端用户于控制终端中对设备运行振动频谱进行读取,基于设备运行振动频谱确定来源设备,嗅探模块向控制终端反馈的设备运行振动频谱对应设备为疑似故障设备。
33、采用本发明提供的技术方案,与已知的公有技术相比,具有如下有益效果:
34、本发明提供一种基于物联网的智能制造设备群的故障分析及嗅探系统,该系统在运行过程中,通过设备群产出产品成品与标准产品成品的差异性对设备群中是否存在故障设备进行判定,进而基于判定结果,进一步在设备群中存在故障设备时,对设备群中故障设备进行嗅探,同时在设备群中故障设备的嗅探过程中,还能够对疑似故障的设备进行反馈,以便于设备群的人工维护更具目标性,从而提升设备群日常维护效率,确保设备群稳定运行的执行生产任务。
本文地址:https://www.jishuxx.com/zhuanli/20240730/197731.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表