一种移动机械臂最佳舒适度逆解方法及系统
- 国知局
- 2024-07-31 23:20:58
本发明涉及机器人姿态求解,具体涉及一种移动机械臂最佳舒适度逆解方法及系统。
背景技术:
1、随着科学技术的不断发展和各种新技术的加持,机器人技术取得了突飞猛进的发展,如今各类机器人已经广泛应用于各个领域。其中,服务机器人作为一类具有特定服务场景需求的机器人,需要具备适应不同场景的能力,并能清晰认知和动态适应所面对的服务任务,以完成特定任务的规划。
2、服务机器人的应用场景多种多样,涵盖了家庭、医疗、餐饮、办公等领域。家庭服务机器人可以帮助人们完成家务劳动,如清洁、烹饪等;医疗服务机器人可以协助医护人员进行手术、康复训练等;办公服务机器人可以帮助员工搬运物品、提供文件管理等支持。不同的服务场景对机器人的要求也各不相同,因此需要针对特定场景进行机器人的规划和设计。
3、服务机器人的规划是指根据特定场景和任务需求,为机器人设定一系列动作和轨迹,使其能够高效、稳定地完成任务。为了适应各个场景的需求,服务机器人的规划需要具备清晰的认知能力和动态适应能力。清晰的认知能力使机器人能够准确理解任务要求和环境信息,从而做出正确判断和决策;而动态适应能力使机器人能够根据环境变化和任务需求的变化,调整自身的规划策略,以确保任务的顺利完成。
4、目前服务机器人的类型大多为移动机械臂,移动机械臂的逆解对于机械臂的运动特点分析、机械臂的轨迹规划以及增加移动机械臂稳定性和工作效率都有重要的基础意义。逆运动学解求解复杂,且有可能不能通过代数方法求解出来,或通常有多个解。在众多的求解方法当中,智能优化算法在机械臂求逆解过程中通用性较强,且对机械臂构型无特殊要求,其中遗传算法具有较好的全局收敛性,与其他传统意义上的解法相比,遗传算法求解移动机械臂逆解过程较为简便,省略了一些数学运算,避免了繁琐的数学推导和各种参数的选择,但由于求解量过多,导致求解时间耗费比较大,并且容易陷入局部最优解。
技术实现思路
1、鉴于以上问题,本发明提出一种移动机械臂最佳舒适度逆解方法及系统,将遗传算法与机械臂几何解法相结合,使得移动机械臂可以以合理的姿态到达指定位置完成抓取任务。
2、根据本发明的一方面,提出一种移动机械臂最佳舒适度逆解方法,该方法包括:
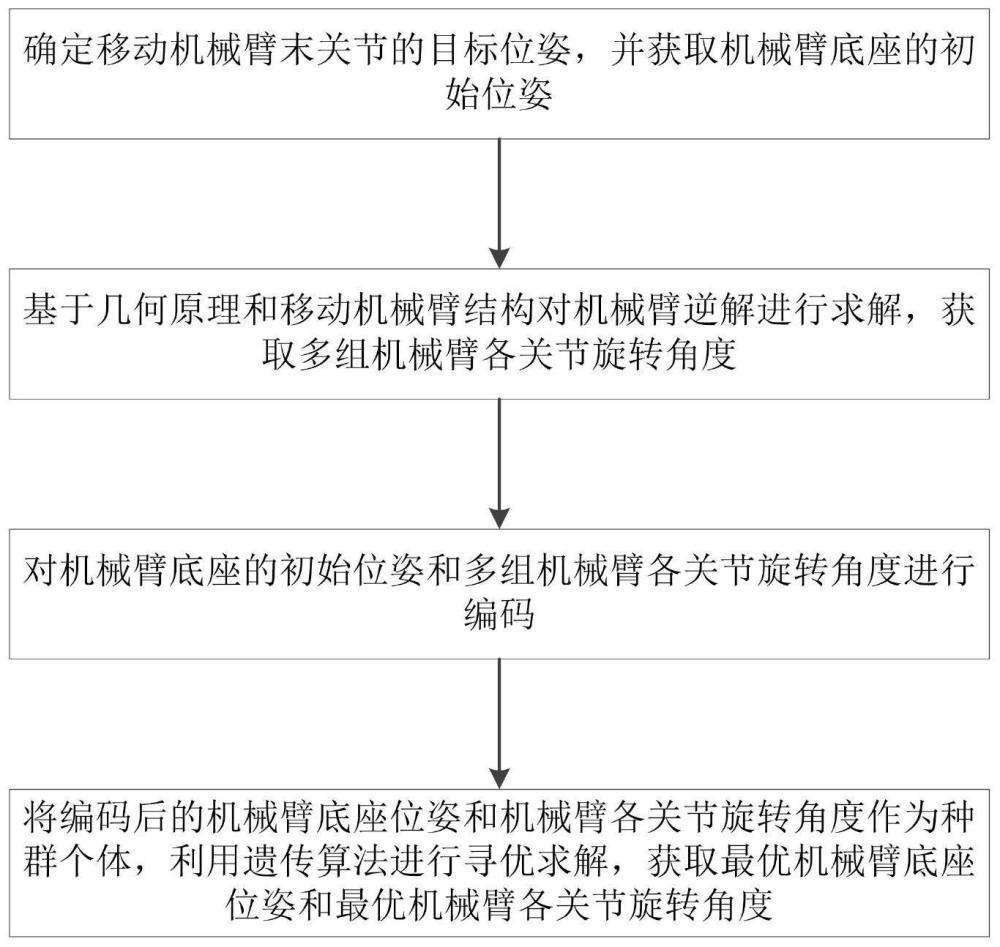
3、确定移动机械臂末关节的目标位姿,并获取机械臂底座的初始位姿;
4、基于几何原理和移动机械臂结构对机械臂逆解进行求解,获取多组机械臂各关节旋转角度;
5、对机械臂底座的初始位姿和多组机械臂各关节旋转角度进行编码,将编码后的机械臂底座位姿和机械臂各关节旋转角度作为种群个体,利用遗传算法进行寻优求解,获取最优机械臂底座位姿和最优机械臂各关节旋转角度。
6、进一步地,所述移动机械臂包括六个自由度关节,其中包括两个肩关节、一个肘关节、三个球腕关节,关节类型均是旋转关节。
7、进一步地,在基于几何原理和移动机械臂结构对机械臂逆解进行求解之前,基于机械臂末关节到底座的变换矩阵将移动机械臂末关节的目标位姿转换至机械臂底座对应的基坐标系下,具体包括:建立移动机械臂关节坐标系,利用d-h法求解出相邻连杆相对于空间直角坐标系的齐次变换矩阵,再通过坐标变换求解出移动机械臂末关节对应的坐标系相对于机械臂底座对应的基坐标系的变换矩阵,进而将移动机械臂末关节的目标位姿转换至机械臂底座对应的基坐标系下。
8、进一步地,所述利用遗传算法进行寻优求解包括:
9、通过总适应度函数计算每个个体的适应度,计算各个个体从第1代遗传到第2代中的概率,计算每个个体的累积概率,当某个个体所对应的累积概率大于预设阈值时,选择该个体,进而选出所需的个体总数;
10、采用部分匹配交叉法,在选出的个体总数中随机选择两个个体,对它们染色体中相邻的2个基因进行交叉操作;
11、选择一个个体,随机选择多个变异位置,对这些位置上的二进制数字进行变异:将1变成0,将0变成1;
12、经过上述遗传、交叉、变异操作后得到的最优个体即为最优机械臂底座位姿和最优机械臂各关节旋转角度。
13、进一步地,所述总适应度函数包括对应底座位置与机械臂各关节角度限制的适应度函数f1、对应移动机械臂与环境发生碰撞限制的适应度函数f2、对应各个关节角度最小限制的适应度函数f3、对应底座位置与机械臂末关节位置限制的适应度函数f4,将多个适应度函数进行加权,获得总适应度函数。
14、进一步地,所述适应度函数f1的计算公式为:
15、
16、其中,xmin为机械臂底座位姿x的最小值,xmax为机械臂底座位姿x的最大值;n表示多组机械臂各关节旋转角度的编号;
17、所述适应度函数f2的计算公式为:
18、
19、所述适应度函数f3的计算公式为:
20、
21、式中,θmax,θmin表示各关节旋转角度的最大、最小值;θnu表示编号n对应一组关节u的角度;
22、所述适应度函数f4的计算公式为:
23、f4=100-(x-xg)2-(y-yg)2
24、式中,(xg,yg)表示目标位姿坐标;(x,y)表示机械臂底座位姿坐标。
25、进一步地,判断是否进行交叉的标准是:在选择完成后,随机生成一个0~1的实数,如果该实数小于预设交叉概率,则对这两个个体进行交叉操作,否则不进行交叉操作;判断是否进行变异的标准是:随机生成一个实数,该实数大于等于0且小于等于1,如果该实数小于预设变异概率,则对该个体进行变异,否则保留该个体不进行变异。
26、进一步地,计算各个个体从第1代遗传到第2代中的概率公式为:
27、
28、式中,f(xi)表示第i个个体xi的适应度值;n表示种群个体总数。
29、根据本发明的另一方面,提出一种移动机械臂最佳舒适度逆解系统,该系统包括:
30、位姿确定模块,其配置成确定移动机械臂末关节的目标位姿,并获取机械臂底座的初始位姿;
31、关节角度多组解求解模块,其配置成基于几何原理和移动机械臂结构对机械臂逆解进行求解,获取多组机械臂各关节旋转角度;所述移动机械臂包括六个自由度关节,其中包括两个肩关节、一个肘关节、三个球腕关节,关节类型均是旋转关节;
32、关节角度最优解求解模块,其配置成对机械臂底座的初始位姿和多组机械臂各关节旋转角度进行编码,将编码后的机械臂底座位姿和机械臂各关节旋转角度作为种群个体,利用遗传算法进行寻优求解,获取最优机械臂底座位姿和最优机械臂各关节旋转角度。
33、进一步地,所述关节角度最优解求解模块中所述利用遗传算法进行寻优求解包括:通过总适应度函数计算每个个体的适应度,计算各个个体从第1代遗传到第2代中的概率,计算每个个体的累积概率,当某个个体所对应的累积概率大于预设阈值时,选择该个体,进而选出所需的个体总数;采用部分匹配交叉法,在选出的个体总数中随机选择两个个体,对它们染色体中相邻的2个基因进行交叉操作;选择一个个体,随机选择多个变异位置,对这些位置上的二进制数字进行变异:将1变成0,将0变成1;经过上述遗传、交叉、变异操作后得到的最优个体即为最优机械臂底座位姿和最优机械臂各关节旋转角度。
34、本发明的有益技术效果是:
35、本发明提出一种新型的移动机械臂逆解方法及系统,首先,确定移动机械臂末关节的目标位姿,并获取机械臂底座的初始位姿;然后,基于几何原理和移动机械臂结构对机械臂逆解进行求解,获取多组机械臂各关节旋转角度;最后,对机械臂底座的初始位姿和多组机械臂各关节旋转角度进行编码,将编码后的机械臂底座位姿和机械臂各关节旋转角度作为种群个体,利用遗传算法进行寻优求解,获取最优机械臂底座位姿和最优机械臂各关节旋转角度。本发明将遗传算法和几何解法相结合,通过设置合适的适应度函数,对移动机械臂底座位置和各关节角度加以限制,最终以合理的姿态完成移动机械臂抓取任务。
本文地址:https://www.jishuxx.com/zhuanli/20240730/197129.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种区块链招投标系统
下一篇
返回列表