一种标注图像设备的方法、装置、设备及存储介质与流程
- 国知局
- 2024-07-31 23:20:52
本发明涉及图像处理,尤其涉及一种标注图像设备的方法、装置、设备及存储介质。
背景技术:
1、目前,通过无人机、机器人等智能终端采集电力设备的可见光或红外图像后,需要利用智能算法对图像中的电力设备进行识别和缺陷分析。由于无人机、机器人等巡检时,都是在固定点位进行拍摄,因此对图像中电力设备进行识别的一种较为常见的方法是:取每个点位拍摄到的一张图像作为模板图像,并在模板图像上标注出目标设备的位置,当后续在对应点位拍摄新的待识别的图像时,将模板图像上的目标设备位置信息映射到待识别图像中,从而实现待识别图像中目标设备的识别。
2、由于风力影响、定位精度误差等因素,无人机、机器人等智能终端每次在同一点位拍摄的图像都会有一定的平移和旋转偏差,因此在将模板图像上的目标设备位置信息映射到待识别图像时,需要用模板匹配方法,将模板图像上的目标设备匹配到待识别图像中,以准确定位待识别图像中的目标设备位置。
3、然而,目前的模板匹配方法基本上只适用于矩形框区域,而模板图像中目标设备的形状往往都是不规则的多边形,如果采用矩形框对目标设备进行标注,很容易框选到较多的背景信息,尤其是在红外图像中进行标注时,矩形框内背景的温度可能对温度识别造成很大的干扰,因此需要研究一种适用于不规则多边形区域的电力图像模板匹配方法。
技术实现思路
1、本发明提供了一种标注图像设备的方法、装置、设备及存储介质,以确定设备待识别图像中目标设备的多边形区域,同时排除非目标设备的背景因素影响,保证模板匹配的精确度。
2、根据本发明的一方面,提供了一种标注图像设备的方法,该方法包括:
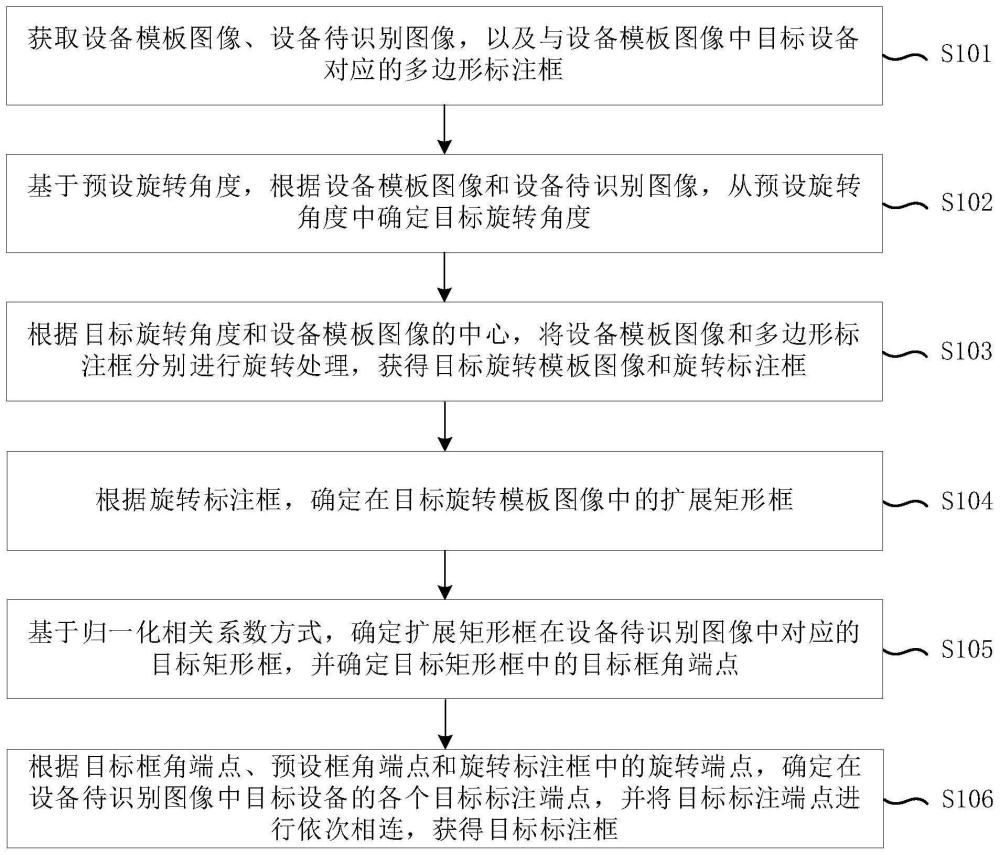
3、获取设备模板图像、设备待识别图像,以及与所述设备模板图像中目标设备对应的多边形标注框;
4、基于预设旋转角度,根据所述设备模板图像和所述设备待识别图像,从所述预设旋转角度中确定目标旋转角度,其中,所述预设旋转角度包括至少两个旋转角度;
5、根据所述目标旋转角度和所述设备模板图像的中心,将所述设备模板图像和所述多边形标注框分别进行旋转处理,获得目标旋转模板图像和旋转标注框;
6、根据所述旋转标注框,确定在所述目标旋转模板图像中的扩展矩形框;
7、基于归一化相关系数方式,确定所述扩展矩形框在所述设备待识别图像中对应的目标矩形框,并确定所述目标矩形框中的目标框角端点,其中,所述目标框角端点与所述扩展矩形框中的预设框角端点相对应;
8、根据所述目标框角端点、所述预设框角端点和所述旋转标注框中的旋转端点,确定在所述设备待识别图像中所述目标设备的各个目标标注端点,并将所述目标标注端点进行依次相连,获得目标标注框。
9、根据本发明的另一方面,提供了一种标注图像设备的装置,该装置,包括:
10、所需材料图像获取模块,用于获取设备模板图像、设备待识别图像,以及与所述设备模板图像中目标设备对应的多边形标注框;
11、目标旋转角度确定模块,用于基于预设旋转角度,根据所述设备模板图像和所述设备待识别图像,从所述预设旋转角度中确定目标旋转角度,其中,所述预设旋转角度包括至少两个旋转角度;
12、旋转标注框获得模块,用于根据所述目标旋转角度和所述设备模板图像的中心,将所述设备模板图像和所述多边形标注框分别进行旋转处理,获得目标旋转模板图像和旋转标注框;
13、扩展矩形框确定模块,用于根据所述旋转标注框,确定在所述目标旋转模板图像中的扩展矩形框;
14、目标框角端点确定模块,用于基于归一化相关系数方式,确定所述扩展矩形框在所述设备待识别图像中对应的目标矩形框,并确定所述目标矩形框中的目标框角端点,其中,所述目标框角端点与所述扩展矩形框中的预设框角端点相对应;
15、目标标注框标注模块,用于根据所述目标框角端点、所述预设框角端点和所述旋转标注框中的旋转端点,确定在所述设备待识别图像中所述目标设备的各个目标标注端点,并将所述目标标注端点进行依次相连,获得目标标注框。
16、根据本发明的另一方面,提供了一种电子设备,所述电子设备包括:
17、至少一个处理器;以及
18、与所述至少一个处理器通信连接的存储器;其中,
19、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的标注图像设备的方法。
20、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的标注图像设备的方法。
21、本发明实施例的技术方案,通过获取设备模板图像、设备待识别图像和多边形标注框。基于预设旋转角度,根据所述设备模板图像和所述设备待识别图像,从所述预设旋转角度中确定目标旋转角度。根据所述目标旋转角度,将所述设备模板图像和所述多边形标注框分别进行旋转处理,获得目标旋转模板图像和旋转标注框,进而确定扩展矩形框。基于归一化相关系数方式,确定所述扩展矩形框在所述设备待识别图像中对应的目标矩形框,并确定所述目标矩形框中的目标框角端点。根据所述目标框角端点、所述预设框角端点和所述旋转标注框中的旋转端点,确定目标标注端点,并将所述目标标注端点进行依次相连,获得目标标注框。本发明技术方案,将目标设备的多边形区域转化为矩形区域进行匹配处理,从而可以采用当前通用的模板匹配方法进行匹配,同时匹配结果仍保持为多边形区域,可精准地框选出设备待识别图像中的目标设备,避免受到非目标设备的背景因素影响,保证了模板匹配的效果。
22、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:1.一种标注图像设备的方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述基于预设旋转角度,根据所述设备模板图像和所述设备待识别图像,从所述预设旋转角度中确定目标旋转角度,包括:
3.根据权利要求1所述的方法,其特征在于,根据所述目标旋转角度和所述设备模板图像的中心,将所述多边形标注框进行旋转处理,获得旋转标注框,包括:
4.根据权利要求3所述的方法,其特征在于,所述基于所述设备模板图像的中心,根据所述端点原始坐标和所述目标旋转角度,确定所述目标旋转模板图像中的旋转标注框,包括:
5.根据权利要求4所述的方法,其特征在于,所述根据所述坐标原点、所述端点原始坐标和所述目标旋转角度,确定所述多边形标注框在旋转后的旋转端点,包括:
6.根据权利要求1所述的方法,其特征在于,所述根据所述旋转标注框,确定在所述目标旋转模板图像中的扩展矩形框,包括:
7.根据权利要求1所述的方法,其特征在于,所述根据所述目标框角端点、所述预设框角端点和所述旋转标注框中的旋转端点,确定在所述设备待识别图像中所述目标设备的各个目标标注端点,包括:
8.一种标注图像设备的装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的标注图像设备的方法。
技术总结本发明公开了一种标注图像设备的方法、装置、设备及存储介质。该方法包括:通过获取设备模板图像、设备待识别图像和多边形标注框。基于预设旋转角度,根据设备模板图像和设备待识别图像,确定目标旋转角度。根据目标旋转角度,将设备模板图像和多边形标注框分别进行旋转处理,获得目标旋转模板图像和旋转标注框,进而确定扩展矩形框。基于归一化相关系数方式,确定目标矩形框,并确定目标矩形框中的目标框角端点。根据目标框角端点、预设框角端点和旋转标注框中的旋转端点,确定目标标注端点,并将目标标注端点进行依次相连,获得目标标注框,以确定设备待识别图像中的目标设备,保证模板匹配的精确度。技术研发人员:刘梓权,李天亮,余佳莹,颜大涵,周辉,唐汶杰,陈国鸿,卢鹏,曹海盛,姚楷楠,郑晓钿,邓嘉浩,曾建兴,郜学思,刘宇嘉,苏健宏,黄佳灵,陈文旭受保护的技术使用者:广东电网有限责任公司技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240730/197122.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。