基于移动平台的汛期堤防内部渗漏智能巡检方法与流程
- 国知局
- 2024-07-31 23:25:52
本发明涉及地球物理检测,尤其涉及基于移动平台的汛期堤防内部渗漏智能巡检方法。
背景技术:
1、传统的堤防隐患探测技术是针对非汛期堤防出现的洞、缝、松等隐患进行常规普查。为了检验全国的堤防隐患探测水平,我国曾在某地区埋设的堤防隐患模型上,组织了国内外各种方法技术的仪器测评。经过各种仪器方法对比发现,真正应用良好的方法是高密度电阻率法、瞬变电磁法、瞬态面波法。但这些传统的检测手段在工程应用的时效性上存在问题,,单日检测工作量不超过1km,故只限于非汛期使用。
2、当前,利用车载阵列地质雷达进行隐患巡检,是一种既可以满足精度,也可以满足效率的检测方法,检测速度可以达到20~50km/h。其通过阵列多通道的检测模式,一次性可以同时测量5~20条平行测线,横向覆盖最多2~3m的检测宽度,但该方法的问题在于检测深度很难突破3m,对浅表裂缝的探测效果较好。但在汛期渗漏的应用场景中,汛期渗漏往往发生在地表5m深度范围内,因此地质雷达法也难以作为汛期渗漏的巡检手段。同时,汛期抢险也要求对堤防隐患探测的尽可能提前。当隐患已经发生再进行探测,再快的方法也只能是事后补救,因此本领域技术人员一直致力于研究高效、低成本、智能化的汛期巡检方法,以能提早发现渗漏隐患,从而避免更大的险情发生。
技术实现思路
1、本发明目的在于提供一种基于移动平台的汛期堤防内部渗漏智能巡检方法,。
2、为实现上述目的,本发明采取下述技术方案:
3、本发明所述的一种基于移动平台的汛期堤防内部渗漏智能巡检方法,所述移动平台为ros可编码机器人;所述ros可编码机器人搭载拖曳式电磁感应设备,采集测点电磁感应测深数据;
4、所述汛期堤防内部渗漏智能巡检方法包括以下步骤,
5、s1,由 ros可编码机器人在堤防道路采集点云数据,构建堤防巡检底图,规划巡检路线;
6、s2,使用ros可编码机器人在非汛期按照所述巡检路线对堤防道路进行自动化巡检,记录巡检数据,包括测点坐标、水位w、磁感应强度垂直分量b,建立堤防巡检背景数据;
7、s3,使用ros可编码机器人在汛期按照所述巡检路线对堤防道路进行自动化隐患巡检,记录所述巡检数据;
8、s4,将同一测点s3步巡检数据与s2步中堤防巡检背景数据进行实时比对,评价堤防渗漏隐患风险;
9、s5,确定堤防渗漏隐患风险点坐标,并转换为公里桩号后报警提示。
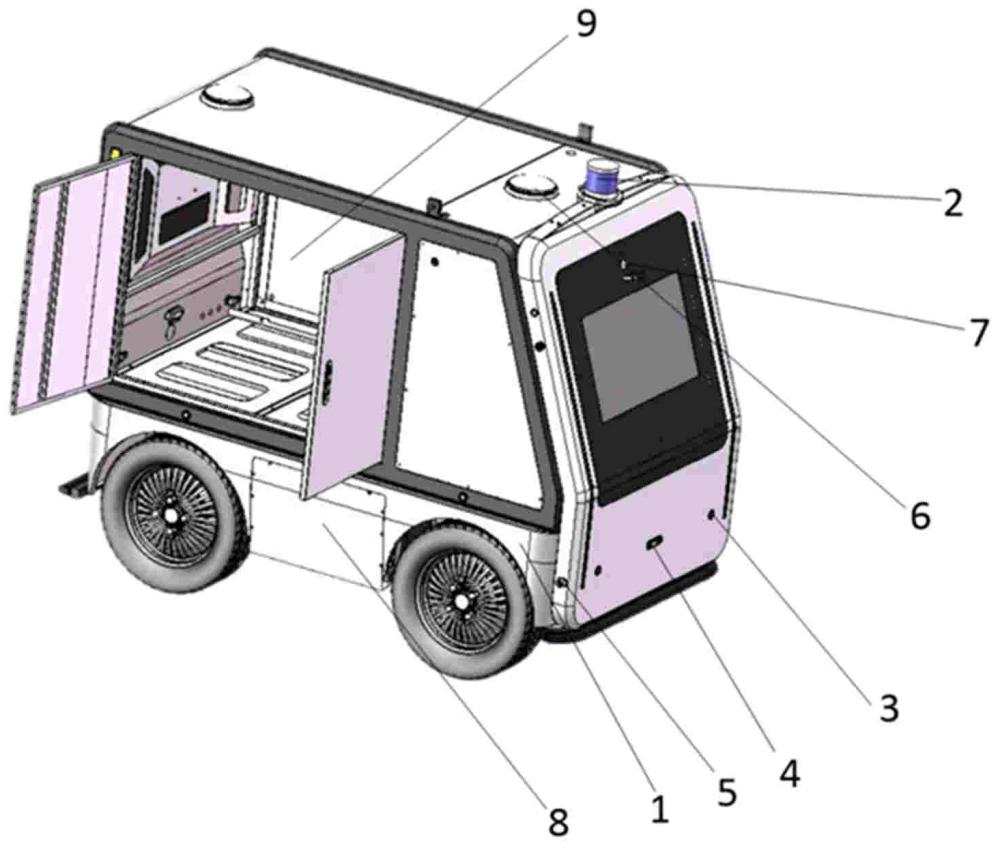
10、进一步地,所述ros可编码机器人包括阿克曼线控底盘、多线束激光雷达、毫米波雷达、视觉深度相机、组合惯性导航系统、rtk定位设备、视频监控摄像头、蓄电池、舱体,使用ros编码的导航算法。
11、进一步地,所述拖曳式电磁感应设备包括主机和线圈;所述主机搭载于所述舱体内;所述线圈位于舱体后,通过发射接收一体化连接线与主机相连。
12、进一步地,所述ros可编码机器人通过rtk定位设备确定初始位置,通过多线束激光雷达和视觉深度相机进行远距离避障,通过毫米波雷达进行近距离避障,通过组合惯性导航系统控制转向,通过视频监控摄像头记录巡检路线周边图像。
13、进一步地,所述自动化巡检具体包括,
14、s2.1,预设采样频率和测点间距,记录并存储初始测点rtk数据、水位数据w和电磁感应测深数据;
15、s2.2,ros可编码机器人按照巡检路线和采样频率采集电磁感应测深数据,当ros可编码机器人经过一个测点间距到达下一测点时,将所述测点间距内的所有电磁感应测深数据叠加平均作为当前测点的电磁感应测深数据,记录并存储当前测点的rtk数据、水位数据w和电磁感应测深数据;
16、s2.3,依次对各测点的电磁感应测深数据进行指数加窗,并转换为磁感应强度垂直分量b;
17、s2.4,将巡检路线所在区域按正方形网格化,将若干次自动化巡检中rtk数据落在同一网格内的测点磁感应强度垂直分量b进行同测道叠加平均,叠加平均后的磁感应强度垂直分量b作为测点的背景电磁感应数据,并结合水位数据,形成巡检数据,构建堤防巡检背景数据。
18、进一步地,所述评价堤防渗漏隐患风险具体包括,计算同一测点汛期巡检数据与非汛期巡检数据的变化率,若变化率mn﹤0.1 ,且wx-wb ﹤1时为无隐患;0.1≤mn﹤0.25 ,且wx-wb ﹤1时为一级隐患,应增加巡检频次;0.25≤mn﹤0.50且1≤wx-wb﹤5时为二级隐患,应排查视频监,并配合其他监控手段不间断监测;mn≧0.5且wx-wb≧5时为三级隐患,应立即应急抢险。
19、进一步地,所述变化率mn为
20、,为测点在汛期x测道1,2…n的磁感应强度垂直分量,为堤防巡检背景数据中测点在非汛期b测道1,2…n的磁感应强度垂直分量。
21、本发明的优点在于可以实现无人化巡检,定位准确,能快速确定渗漏隐患位置,提高了汛期堤防内部渗漏诊断速度和精确度,为汛期堤防提供可靠的保障。
技术特征:1.一种基于移动平台的汛期堤防内部渗漏智能巡检方法,其特征在于:所述移动平台为ros可编码机器人;所述ros可编码机器人搭载拖曳式电磁感应设备,采集测点电磁感应测深数据;
2.根据权利要求1所述的一种基于移动平台的汛期堤防内部渗漏智能巡检方法,其特征在于:所述ros可编码机器人包括阿克曼线控底盘、多线束激光雷达、毫米波雷达、视觉深度相机、组合惯性导航系统、rtk定位设备、视频监控摄像头、蓄电池、舱体,使用ros编码的导航算法。
3.根据权利要求2所述的一种基于移动平台的汛期堤防内部渗漏智能巡检方法,其特征在于:所述拖曳式电磁感应设备包括主机和线圈;所述主机搭载于所述舱体内;所述线圈位于舱体后,通过发射接收一体化连接线与主机相连。
4.根据权利要求1或2所述的一种基于移动平台的汛期堤防内部渗漏智能巡检方法,其特征在于:所述ros可编码机器人通过rtk定位设备确定初始位置,通过多线束激光雷达和视觉深度相机进行远距离避障,通过毫米波雷达进行近距离避障,通过组合惯性导航系统控制转向,通过视频监控摄像头记录巡检路线周边图像。
5.根据权利要求1所述的一种基于移动平台的汛期堤防内部渗漏智能巡检方法,其特征在于:s2步中所述自动化巡检具体包括,
6.根据权利要求1所述的一种基于移动平台的汛期堤防内部渗漏智能巡检方法,其特征在于:所述评价堤防渗漏隐患风险具体包括,计算同一测点汛期巡检数据与非汛期巡检数据的变化率,若变化率mn﹤0.1,且wx-wb﹤1时为无隐患;0.1≤mn﹤0.25,且wx-wb﹤1时为一级隐患,应增加巡检频次;0.25≤mn﹤0.50且1≤wx-wb﹤5时为二级隐患,应排查视频监,并配合其他监控手段不间断监测;mn≧0.5且wx-wb≧5时为三级隐患,应立即应急抢险。
7.根据权利要求6所述的一种基于移动平台的汛期堤防内部渗漏智能巡检方法,其特征在于:所述变化率mn为
技术总结本发明公开了一种基于移动平台的汛期堤防内部渗漏智能巡检方法,由ROS可编码机器人在堤防道路采集点云数据,构建堤防巡检底图,规划巡检路线;使用ROS可编码机器人在非汛期按照所述巡检路线对堤防道路进行自动化巡检,记录巡检数据,建立堤防巡检背景数据;将汛期同一测点的巡检数据与堤防巡检背景数据进行实时比对,评价堤防渗漏隐患风险;确定堤防渗漏隐患风险点坐标,并转换为公里桩号后报警提示。技术研发人员:安新代,谢向文,郭士明,王善辉,胡亚鹏,侯攀飞,张宪君,张亚玲,苏憬煊,杨涛受保护的技术使用者:黄河勘测规划设计研究院有限公司技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240730/197517.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表