一种井下姿态参数测量冗余容错方法及系统
- 国知局
- 2024-07-31 23:25:43
本申请属于钻井测量,涉及一种井下姿态参数测量冗余容错方法及系统。
背景技术:
1、当前全球油气勘探开发正从常规油气藏向低渗透、非常规发展,从陆地向海洋发展,从浅层向深层、超深层发展。导向钻井技术正引领全球第四次石油技术革命。井下姿态参数(即井斜角、工具面角)的实时精确测量是导向钻井工具实现实时导向控制的前提。目前,用于测量工具姿态的器件主要有三轴重力加速度计、三轴陀螺仪和三轴磁通门。但考虑井下高温、高压、强振动等环境,在某个近钻头传感器故障的情况下,亟需具有一定冗余能力且能够进行容错的井下姿态参数测量系统。
2、现有技术中,公开号为cn115618167a的中国专利文献公开了一种多近钻头传感器冗余组合容错动态测量模型及建立方法。采用磁通门、加速度计、陀螺仪对井斜角、方位角、工具面角等参数进行解算,建立多近钻头传感器冗余残差误差模型,接着构建基于深度学习的多近钻头传感器容错判断模型,最后构建一次预测状态方程,构造出多近钻头传感器冗余组合下状态方程,进而实现近钻头随钻测量装置姿态容错动态测量模型的构建。该发明大幅减小了测量误差,但是未考虑到出现多个近钻头传感器损坏情况后,无法判断生成的参数是否具有合理性。
技术实现思路
1、为了对披露的实施例的一些方面有基本的理解,下面给出了简单的概括。所述概括不是泛泛评述,也不是要确定关键/重要组成元素或描绘这些实施例的保护范围,而是作为后面的详细说明的序言。
2、为了解决相关技术中存在的问题,本公开实施例提供了一种井下姿态参数测量冗余容错方法及系统,用以解决现有技术中在钻井时,无法判断近钻头传感器生成的参数是否具有合理性的问题。
3、在一些实施例中,提供了应用于具有井下钻头本体、多个测量短节、多种近钻头传感器和fbg传感器的冗余容错系统中,其中,测量短节包括用于对测量短节之间数据交互的通信模块和控制模块,所述方法,包括:
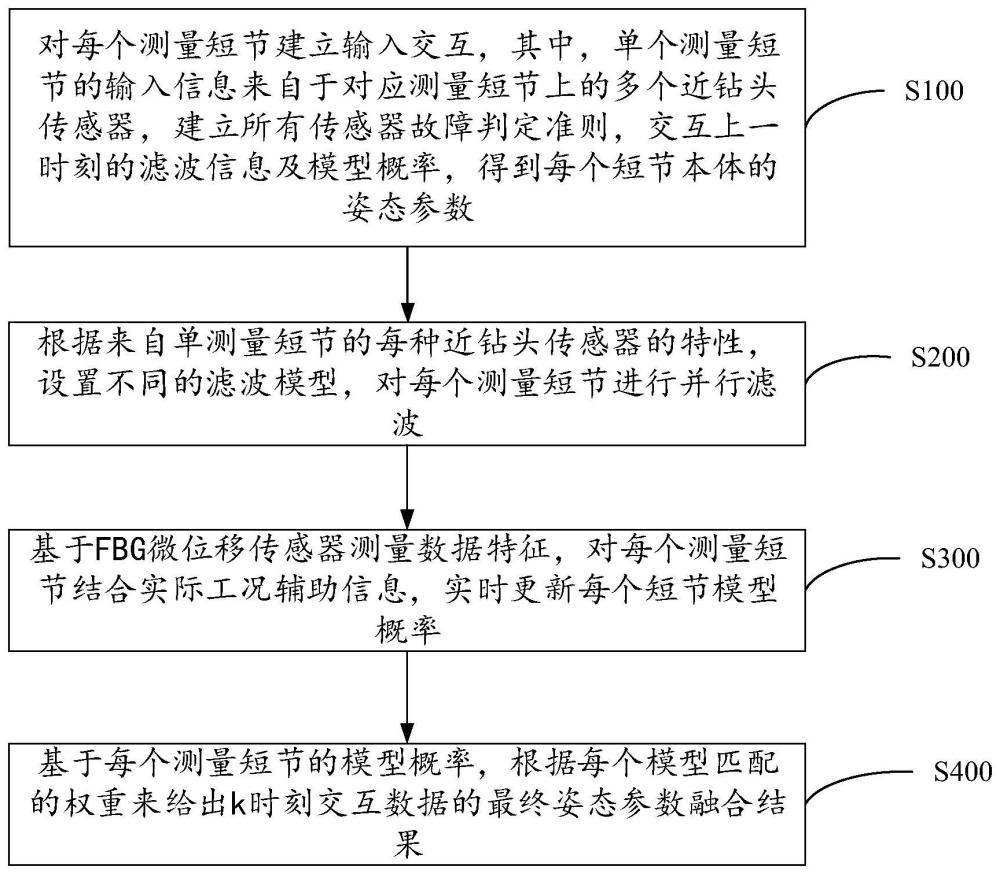
4、对每个测量短节建立输入交互,其中,单个测量短节的输入信息来自于对应测量短节上的多个近钻头传感器,建立所有近钻头传感器故障判定准则,交互上一时刻的滤波信息及模型概率,得到每个短节本体的姿态参数;
5、根据来自单测量短节的每种近钻头传感器的特性,设置不同的滤波模型,对每个测量短节进行并行滤波;
6、基于fbg传感器测量数据特征,对每个测量短节结合实际工况辅助信息,实时更新每个短节模型概率;
7、基于每个测量短节的模型概率,根据每个模型匹配的权重来给出k时刻交互数据的最终姿态参数融合结果。
8、优选地,应用于具有冗余容错系统,其中,多种近钻头传感器,包括三轴重力加速度传感器、三轴陀螺仪、三轴磁通门;
9、根据来自单测量短节的每种近钻头传感器的特性,设置不同的滤波模型,对每个测量短节进行并行滤波,包括:
10、对陀螺仪采用扩展卡尔曼滤波器,建立陀螺仪转速模型,结合加速度计测量结果作为量测方程,进而得到估计工具面角;
11、对加速度计近钻头传感器,利用频选互补集合经验模态分解法对测量结果进行滤波,通过硬阈值的选取,对分解的各阶本征模态函数赋予权重,重构信号,将滤波结果进行姿态解算;
12、对磁通门近钻头传感器,建立误差估算模型并采用最小二乘法进行估算,得到的结果对测量结果进行补偿,将滤波结果进行姿态解算,得到冗余姿态参数。
13、优选地,交互上一时刻的滤波信息及模型概率,得到每个短节本体的姿态参数,包括:
14、假设在k-1时刻,每个模型都有一个最优估计及估计协方差其中,代表模型i在k-1时刻的最优估计将每个模型相关的模型的估计状态及协方差矩阵进行加权融合,得到融合后的目标在k-1时刻的最优状态及协方差矩阵:
15、
16、
17、其中,为模型j在k-1时刻的混合状态估计,为模型j在k-1时刻的混合协方差估计,μij,k-1为模型i和模型j在k-1时刻的混合概率,其计算公式为:
18、
19、其中,pij为模型mi到模型mj的转移概率,预测概率为归一化因子,zk-1为k-1时刻的信息。
20、优选地,基于fbg传感器测量数据特征,对每个测量短节结合实际工况辅助信息,实时更新每个短节模型概率,包括:
21、
22、其中,n是测量模型的维数,分别为模型j在k时刻的量测预测残差及其协方差阵,hj,k是模型j在k时刻的测量矩阵,rj,k是模型j在k时刻的测量噪声协方差矩阵;
23、根据计算的k时刻的每个模型的似然值,实现模型概率的更新:
24、
25、其中c=∑μj,k-1λj,k为归一化常数。
26、优选地,基于每个测量短节的模型概率,根据每个模型匹配的权重来给出k时刻交互数据的最终姿态参数融合结果,包括:
27、根据更新后的模型概率依次将模型融合起来,得到imm滤波算法的输出目标状态及协方差矩阵:
28、
29、
30、优选地,fbg传感器的近钻头传感器故障判定准则,包括:
31、获取fbg传感器的测量数据,所述测量数据包括光栅波长、信号频率和信号幅值中的一项或者多项;
32、将fbg传感器的测量数据来训练决策树算法模型,所述决策树算法模型用于识别fbg传感器损坏状态;
33、将采集到的fbg传感器的目标测量数据输入决策树算法模型来识别fbg传感器损坏状态。
34、优选地,对加速度计近钻头传感器测量参数进行故障诊断,包括:
35、信号范围的判断、信号连续性判定和信号相关性判定中任一种或者多种。
36、优选地,信号范围的判断,包括:每个重力加速度计都有一个固定的测量范围(vmin~vmax),超过(vmin~vmax)范围则被认为是故障;
37、信号连续性判定,包括:利用导向钻井工具的旋转速度有界,记最大值为ω0,在一个采样周期内工具转过的角度记为δφ,则必有δφ≤ω0t,记导向钻井工具转速为ω0时的最大信号梯度δv,则一个采样周期内各轴重力加速度计的信号变化量不应超过δv;
38、信号相关性判定,包括:理想情况下,三轴加速度计的输出信号满足考虑实际测量误差,取允许误差范围δvg=vg×20%,当则确定至少有一个方向加速度计故障。
39、本公开实施例提供的一种井下姿态参数测量冗余容错方法及系统,可以实现以下技术效果:
40、建立多近钻头传感器滤波模型,来实时调整更新各测量短节各近钻头传感器测量结果的模型概率,使其能够输出最优的测量结果。同时,结合fbg传感器信息对工况的判定,辅助进行故障诊断。当一个或多个近钻头传感器出现失效或损坏时,可以及时做出调整,通过更新权值来实现容错。
41、以上的总体描述和下文中的描述仅是示例性和解释性的,不用于限制本申请。
技术特征:1.一种井下姿态参数测量冗余容错方法,其特征在于,应用于具有井下钻头本体、多个测量短节、多种近钻头传感器和fbg传感器的冗余容错系统中,其中,测量短节包括用于对测量短节之间数据交互的通信模块和控制模块,所述方法,包括:
2.根据权利要求1所述的方法,其特征在于,应用于具有冗余容错系统,其中,多种近钻头传感器,包括三轴重力加速度传感器、三轴陀螺仪、三轴磁通门;
3.根据权利要求2所述的方法,其特征在于,交互上一时刻的滤波信息及模型概率,得到每个短节本体的姿态参数,包括:
4.根据权利要求3所述的方法,其特征在于,基于fbg传感器测量数据特征,对每个测量短节结合实际工况辅助信息,实时更新每个短节模型概率,包括:
5.根据权利要求4所述的方法,其特征在于,基于每个测量短节的模型概率,根据每个模型匹配的权重来给出k时刻交互数据的最终姿态参数融合结果,包括:
6.根据权利要求1所述的方法,其特征在于,fbg传感器的近钻头传感器故障判定准则,包括:
7.根据权利要求1所述的方法,其特征在于,对加速度计近钻头传感器测量参数进行故障诊断,包括:
8.根据权利要求7所述的方法,其特征在于,信号范围的判断,包括:每个重力加速度计都有一个固定的测量范围(vmin~vmax),超过(vmin~vmax)范围则被认为是故障;
9.一种井下姿态参数测量冗余容错系统,其特征在于,包括:井下钻头本体、多个测量短节、多种近钻头传感器和fbg传感器,其中,每一个测量短节上设置有多种近钻头传感器、fbg传感器;测量短节包括用于对测量短节之间数据交互的通信模块和控制模块。
10.根据权利要求9所述的井下姿态参数测量冗余容错系统,其特征在于,所述多种近钻头传感器,包括三轴重力加速度传感器、三轴陀螺仪和三轴磁通门。
技术总结本发明涉及钻井测量技术领域,公开了一种井下姿态参数测量冗余容错方法及系统,所述方法包括:对每个测量短节建立输入交互;根据来自单测量短节的每种近钻头传感器的特性,设置不同的滤波模型,对每个测量短节进行并行滤波;基于FBG微位移传感器测量数据特征,对每个测量短节结合实际工况辅助信息,实时更新每个短节模型概率;基于每个测量短节的模型概率,根据每个模型匹配的权重来给出k时刻交互数据的最终姿态参数融合结果。本发明将通过利用FBG传感器来辅助测量工况,配合各近钻头传感器进行故障诊断,将结果放入模型概率更新过程。当某个近钻头传感器出现故障,系统能及时做出调整,以保证测量的连续可靠性。技术研发人员:毛艳慧,杨龙瀚,高怡,霍爱清,李飞受保护的技术使用者:西安石油大学技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240730/197508.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表