一种盐田活碴路径及小车运行规划方法与流程
- 国知局
- 2024-07-31 23:41:40
本发明涉及盐田生产,具体涉及一种盐田活碴路径及小车运行规划方法。
背景技术:
1、活碴操作是我国海盐生产结晶工艺独有的操作,按蒸发量的不同,定期翻动盐粒的操作称为活碴。活碴能改变盐晶体的位置,扩大卤水与晶体的接触面,使氯离子、钠离子较为均衡地向晶体各晶面粘附,降低卤水的过饱和度,能减少粉盐、片盐的形成。因活碴破碎了池底盐层平面,可减少反射损失的辐射能,有利于卤水吸收辐射能增大蒸发量。
2、盐田自动活碴机器人是解决盐田活碴的设备,对于设备而言,路径规划是机器人运行的归本,在实际规划时,盐田情况不同,控制逻辑复杂,实际规划难度较大,导航算法规划时可能会出现错误,进而产生错误运行风险,影响小车运行安全。
3、为此提出一种盐田活碴路径及小车运行规划方法。
技术实现思路
1、本发明的目的在于:为解决上述背景技术中提到的问题,本发明提供了一种盐田活碴路径及小车运行规划方法。
2、本发明为了实现上述目的具体采用以下技术方案:
3、一种盐田活碴路径及小车运行规划方法,包括如下步骤:
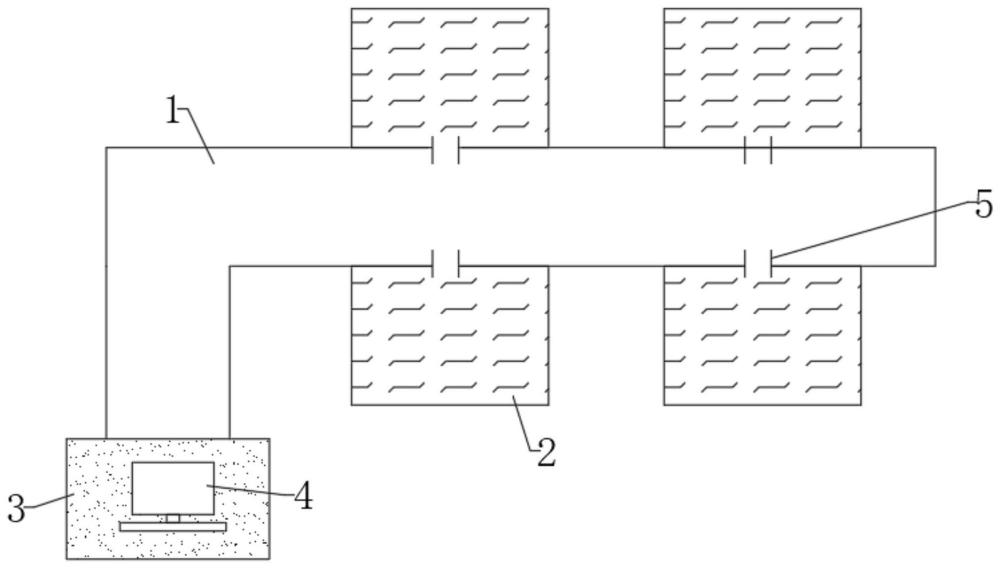
4、区域规划设计:划分设备存储区、公共道路和工作区,所述公共道路和工作区之间设置有进出口;
5、活碴小车的活碴耙逻辑控制规划设计:设计不同区域中小车对活碴耙控制方式、不同运行状态下的活碴耙控制方式;
6、活碴小车行走实际范围规划:确定活碴小车的实时位置和轮廓边缘。
7、进一步地,所述设备存储区为活碴小车停放区域,所述公共道路为活碴小车行驶区域,所述工作区为盐田,活碴小车在工作区进行活碴作业。
8、进一步地,所述不同区域中活碴小车的活碴耙逻辑控制规划设计为:设备存储区活碴耙始终抬起,所述公共道路中活碴耙始终抬起,所述工作区中小车向前运行时,活碴耙放下,小车转弯或者倒退时,活碴耙提升。
9、进一步地,所述不同运行状态下的活碴耙控制方式为:转弯前活碴耙抬升、转弯完成后活碴耙放下、倒车前先抬升活碴耙、倒车完成后放下活碴耙。
10、进一步地,所述小所述小车活碴耙传感器触碰到绳索,小车停止,活碴耙抬升,小车向前运行,当运行到一定距离并且传感器信号消失时,活碴耙放下后继续工作;小车超出运行允许距离时,判定为绳索无法脱落,发出报警信息,人工介入。
11、进一步地,所述活碴小车行走实际范围规划包括使用gps定位模块定位导航和实时更新计算活碴小车、活碴耙的轮廓信息。
12、本发明的有益效果如下:
13、本发明通过路径属性复制的方法进行规划,结合gps定位,当机器人位于不同属性的区域时,就会有相应的控制逻辑。对于小车的运行控制难度也会大大降低,并且提高运行稳定性,通过采用智能算法,提前规划好路径,对于固定作业场合而言,运行可靠性和安全性提高,难度降低,对于在电子地图中对于小车运行控制逻辑进行赋值,使得小车控制逻辑的层次性明显,控制逻辑简单可靠,小车路径规划智能算法与实际导航分开运行,在工程实际中安全可靠,算法规划的错误不会影响小车的运行安全,实现了盐田活碴作业的高效、精确、安全和智能化,为盐田的现代化管理和作业提供了有效的技术支持。
技术特征:1.一种盐田活碴路径及小车运行规划方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种盐田活碴路径及小车运行规划方法,其特征在于,所述设备存储区(3)为活碴小车停放区域,所述公共道路(1)为活碴小车行驶区域,所述工作区(2)为盐田,活碴小车在工作区(2)进行活碴作业。
3.根据权利要求2所述的一种盐田活碴路径及小车运行规划方法,其特征在于,所述不同区域中活碴小车的活碴耙逻辑控制规划设计为:设备存储区(3)活碴耙始终抬起,所述公共道路(1)中活碴耙始终抬起,所述工作区(2)中小车向前运行时,活碴耙放下,小车转弯或者倒退时,活碴耙提升。
4.根据权利要求3所述的一种盐田活碴路径及小车运行规划方法,其特征在于,所述不同运行状态下的活碴耙控制方式为:转弯前活碴耙抬升、转弯完成后活碴耙放下、倒车前先抬升活碴耙、倒车完成后放下活碴耙。
5.根据权利要求4所述的一种盐田活碴路径及小车运行规划方法,其特征在于,所述小车活碴耙传感器触碰到绳索,小车停止,活碴耙抬升,小车向前运行,当运行到一定距离并且传感器信号消失时,活碴耙放下后继续工作;小车超出运行允许距离时,判定为绳索无法脱落,发出报警信息,人工介入。
6.根据权利要求1所述的一种盐田活碴路径及小车运行规划方法,其特征在于,所述活碴小车行走实际范围规划包括使用gps定位模块定位导航和实时更新计算活碴小车、活碴耙的轮廓信息。
7.根据权利要求1所述的一种盐田活碴路径及小车运行规划方法,其特征在于,所述区域规划设计通过电子地图实现,针对不同赋值,小车有不同的运行逻辑。
技术总结本发明公开了一种盐田活碴路径及小车运行规划方法,涉及盐田生产技术领域。本发明包括如下步骤:区域规划设计:划分设备存储区、公共道路和工作区,所述公共道路和工作区之间设置有进出口;活碴小车的活碴耙逻辑控制规划设计:设计不同区域中小车对活碴耙控制方式、不同运行状态下的活碴耙控制方式;活碴小车行走实际范围规划:确定活碴小车的实时位置和轮廓边缘,本发明使得小车控制逻辑的层次性明显,控制逻辑简单可靠,小车路径规划智能算法与实际导航分开运行,在工程实际中安全可靠,算法规划的错误不会影响小车的运行安全,实现了盐田活碴作业的高效、精确、安全和智能化,为盐田的现代化管理和作业提供了有效的技术支持。技术研发人员:安延平,贺赟晖,胡开宝,毕李刚,张庆龙,马海永,邱博轩,李永强,路明元,刘成森,严迎春,孙浩,刘建锐,周晓龙,曾明星,李佳峻,赵辉,鄂建军,袁浩,宫轶平,常健,牛思凯,高飞,任惠婷,常丹丹受保护的技术使用者:唐山三友盐化有限公司技术研发日:技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240730/198115.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表