一种穿戴式自感应水下推进器控制方法、系统、设备、程序产品以及介质
- 国知局
- 2024-07-31 23:41:49
本发明涉及水下推进器控制,具体涉及一种穿戴式自感应水下推进器控制方法、系统、设备、程序产品以及介质。
背景技术:
1、近年来,随着水下娱乐、水下勘探、水下考古等水下产业的不断兴起,国家对于海洋战略发展的重视程度日渐上升,水下推进器已成为军民用领域不可或缺的工具及工具之一。水下推进器市场成熟且前景广阔,目前,越来越多的水下推进器被投入市场,但目前市面上现有的水下推进器均为双手握控或单手指控方式进行操控,这种操控方式需要手参与控制,束缚了用户的双手,大大降低了用户的使用体验,且在特定领域无法满足用户水下摄影或水下持枪前进等灵活性较高的运动需求。
2、现有的技术提出穿戴式自感应水下推进器及推进方法,该控制方案解放了双手,但是该方案利用预设值划分三个挡位,并根据挡位控制推进器进行固定推力输出,在推力输出上系统运行不稳定,抗干扰能力较弱,并且该方法仅运用单一imu对人体打腿频率进行检测,判据单一,导致水下推进器的控制精度较低的问题。
3、因此,需要提供一种穿戴式自感应水下推进器控制方法、系统、设备、程序产品以及介质以解决上述问题。
技术实现思路
1、本发明提供一种穿戴式自感应水下推进器控制方法、系统、设备、程序产品以及介质,以解决现有的利用预设值划分三个挡位,并根据挡位控制推进器进行固定推力输出,在推力输出上系统运行不稳定,抗干扰能力较弱,并且该方法仅运用单一imu对人体打腿频率进行检测,判据单一,导致水下推进器的控制精度较低的问题。
2、本发明的一种穿戴式自感应水下推进器控制方法采用如下技术方案:包括:
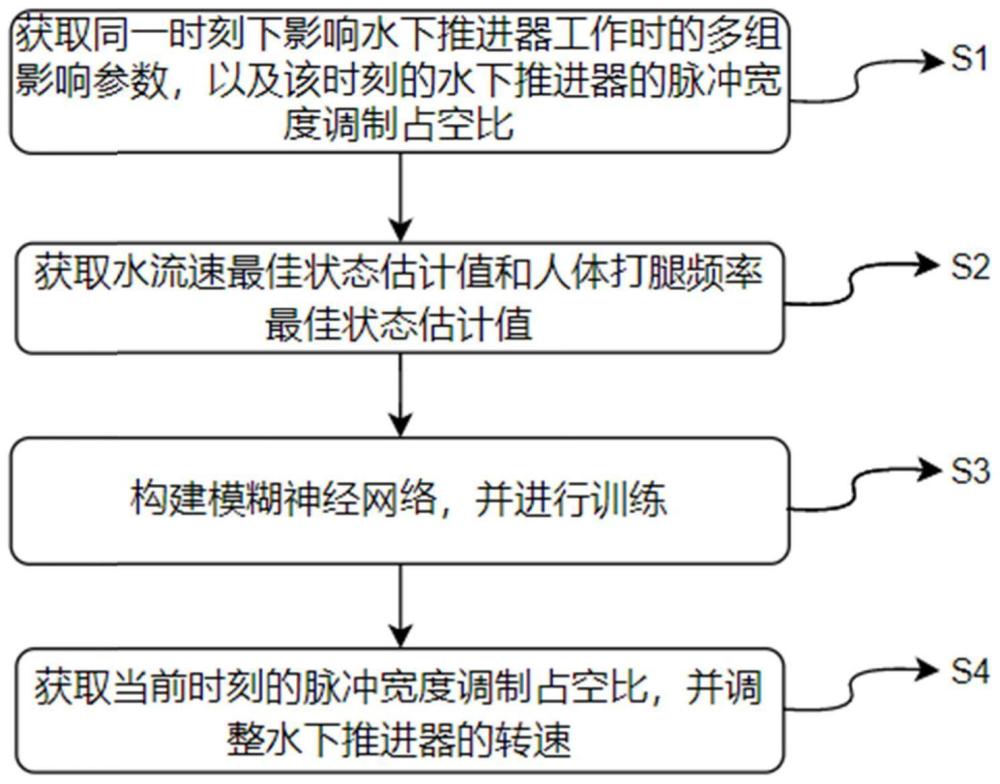
3、获取同一时刻下影响水下推进器工作时的多组影响参数;以及每个时刻水下推进器对应的冲宽度调制占空比;其中,每组影响参数包括:水流速和人体打腿频率;
4、对同一时刻的所有组影响参数进行去噪处理,将去噪处理后的每种影响参数进行加权平均融合得到目标水流速和目标人体打腿频率;
5、利用扩展卡尔曼滤波算法,分别对目标水流速和目标人体打腿频率进行处理得到水流速最佳状态估计值和人体打腿频率最佳状态估计值;
6、构建模糊神经网络,将同一时刻对应的水流速最佳状态估计值和人体打腿频率最佳状态估计值作为输入量,该时刻水下推进器的脉冲宽度调制占空比作为输出量,对模糊神经网络训练;
7、将当前时刻水流速最佳状态估计值和人体打腿频率最佳状态估计值,输入训练好的模糊神经网络,得到当前时刻的脉冲宽度调制占空比,根据当前时刻的脉冲宽度调制占空比调整水下推进器的转速。
8、优选地,获取影响水下推进器工作时的多组影响参数的步骤为:
9、将姿态传感器置于人体两条大腿处,以检测人体穿戴水下推进器在水下时的两组人体打腿频率;
10、将水流速传感器挂置于人体腰部绑带两侧处,以检测人体穿戴水下推进器在水下时的两组水流速。
11、优选地,模糊神经网络包括:
12、输入层,用于输入水流速最佳状态估计值和人体打腿频率最佳状态估计值;
13、模糊化层,用于根据模糊隶属度函数将输入层输入的每个参数划分为三个模糊子集,每个输入参数对应神经网络的一组节点,每个节点均代表一个模糊隶属度函数值;
14、模糊规则计算层,用于对模糊化层中的每组节点中取一个不重复的隶属函数值进行直积;
15、归一化层,用于对模糊规则计算层计算结果进行归一化;
16、以及输出层,用于将归一化结果进行逆模糊化,并输出脉冲宽度调制占空比。
17、优选地,划分模糊子集的隶属度函数采用高斯铃型函数。
18、优选地,对同一时刻的所有组影响参数进行去噪处理的步骤为:
19、对所有组影响参数进行幅值滤波;
20、并对幅值滤波后的人体打腿频率、水流速分别进行滑动平均处理,得到去噪处理后的人体打腿频率和水流速。
21、一种穿戴式自感应水下推进器控制系统,包括:
22、参数获取模块,用于获取同一时刻下影响水下推进器工作时的多组影响参数;以及每个时刻水下推进器对应的冲宽度调制占空比;其中,每组影响参数包括:水流速和人体打腿频率;
23、参数处理模块,用于对同一时刻的所有组影响参数进行去噪处理,将去噪处理后的每种影响参数进行加权平均融合得到目标水流速和目标人体打腿频率;利用扩展卡尔曼滤波算法,分别对目标水流速和目标人体打腿频率进行处理得到水流速最佳状态估计值和人体打腿频率最佳状态估计值;
24、模糊神经网络构建模块,用于构建模糊神经网络,将同一时刻对应的水流速最佳状态估计值和人体打腿频率最佳状态估计值作为输入量,该时刻水下推进器的脉冲宽度调制占空比作为输出量,对模糊神经网络训练;
25、推进器控制模块,用于将当前时刻水流速最佳状态估计值和人体打腿频率最佳状态估计值,输入训练好的模糊神经网络,得到当前时刻的脉冲宽度调制占空比,根据当前时刻的脉冲宽度调制占空比调整水下推进器的转速。
26、一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现本发明公开的一种穿戴式自感应水下推进器控制方法的步骤。
27、一种程序产品,包括计算机程序,该计算机程序被运行时,用于执行本发明公开的一种穿戴式自感应水下推进器控制方法的步骤。
28、一种存储介质,其上存储有计算机程序,该计算机程序被运行时,用于执行本发明公开的一种穿戴式自感应水下推进器控制方法的步骤。
29、本发明的有益效果是:
30、通过获取同时刻的多组影响参数,即同时刻的多组水流速和多组人体打腿频率,将多组影响参数去噪处理,然后基于去噪后的数据,并利用卡尔曼滤波器进行影响参数的最佳状态估计,即可得到的人体打腿频率最佳状态估计值和水流速最佳状态估计值,将人体打腿频率最佳状态估计值和水流速最佳状态估计值作为输入变量,利用模糊神经网络进行推理运算后得到唯一的脉冲宽度调制占空比,基于得到的脉冲宽度调制占空比可以实时调整水下推进器的转速,实现对水下推进器的连续控制。即本发明的方法使用了卡尔曼滤波技术对去噪融合后的影响参数给出最大似然意义上的最佳估计,同时采用多组影响参数融合的方式消除系统本身非线性的影响,提高了系统的精度;通过建立模糊神经网络计算脉冲宽度调制占空比实现穿戴式自感应水下推进器的推力输出控制,充分发挥神经网络的并行处理能力和模糊系统的推理能力,具有较高的效率,提高了穿戴式自感应水下推进器推力输出控制的稳定性和可靠性。
技术特征:1.一种穿戴式自感应水下推进器控制方法,其特征在于,包括:
2.根据权利要求1所述的一种穿戴式自感应水下推进器控制方法,其特征在于,获取影响水下推进器工作时的多组影响参数的步骤为:
3.根据权利要求1所述的一种穿戴式自感应水下推进器控制方法,其特征在于,模糊神经网络包括:
4.根据权利要求3所述的一种穿戴式自感应水下推进器控制方法,其特征在于,划分模糊子集的隶属度函数采用高斯铃型函数。
5.根据权利要求1所述的一种穿戴式自感应水下推进器控制方法,其特征在于,对同一时刻的所有组影响参数进行去噪处理的步骤为:
6.一种穿戴式自感应水下推进器控制系统,其特征在于,包括:
7.一种电子设备,其特征在于,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如权利要求1-5中任一项所述方法的步骤。
8.一种程序产品,其特征在于,包括计算机程序,该计算机程序被运行时,用于执行权利要求1-5任一项所述方法的步骤。
9.一种存储介质,其特征在于,其上存储有计算机程序,该计算机程序被运行时,用于执行权利要求1-5任一项所述方法的步骤。
技术总结本发明涉及水下推进器控制技术领域,具体涉及一种穿戴式自感应水下推进器控制方法、系统、设备、程序产品以及介质,该方法包括:获取影响水下推进器工作时的多组影响参数以及水下推进器的脉冲宽度调制占空比;获取水流速最佳状态估计值和人体打腿频率最佳状态估计值;构建模糊神经网络,并进行训练;获取当前时刻的脉冲宽度调制占空比,并调整水下推进器的转速。本发明采用多组影响参数融合的方式消除系统本身非线性的影响,提高了系统的精度;通过建立模糊神经网络计算脉冲宽度调制占空比实现穿戴式自感应水下推进器的推力输出控制,充分发挥神经网络的并行处理能力和模糊系统的推理能力,以提高了水下推进器推力输出控制的稳定性和可靠性。技术研发人员:孙博洋,杨锦帅,井安言,高剑受保护的技术使用者:西北工业大学技术研发日:技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240730/198130.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表