一种基于光电监测分析的无人机遇阻动态调控装置系统
- 国知局
- 2024-07-31 23:41:54
本发明涉及无人机调控,尤其涉及一种基于光电监测分析的无人机遇阻动态调控装置系统。
背景技术:
1、近年来,随着无人机自主飞行能力的提升,尤其是复杂环境下的自主避障能力,成为行业发展的关键瓶颈和技术热点,推动了相关技术研发与创新,同时光电传感器(如摄像头、激光雷达、红外传感器等)在分辨率、精度、抗干扰能力等方面的不断提升,为无人机实时、精确感知环境提供了硬件基础;
2、计算机视觉技术,特别是深度学习算法在图像识别、目标检测、跟踪、语义分割等方面的显著进展,使得无人机能够从光电传感器获取的图像数据中高效提取障碍物信息,而引入自适应控制能更好的使无人机根据避障需求实时调整飞行姿态和速度,实现精细化避障操作。
3、经检索,中国专利号为cn111625020b的发明专利,公开了一种基于光电监测分析的无人机遇阻动态调控装置系统,与现有技术相比,该中国专利号为cn111625020b的发明专利能对受到较大风阻的飞行状态的无人机进行反向方位化、动力输出控制化的驱动调控,使得无人机在较大偏移风阻环境中能够保持较为精准的飞行路径,同时也提高了无人机飞行的稳定性。
4、但上述装置在实际的使用过程中,无人机设备不仅受到风阻的影响,在强光、弱光或光线不均匀的情况下,还会导致无人机的光电监测设备对障碍物的识别和跟踪精度下降。光线条件不佳时,设备可能无法准确捕捉障碍物的特征和轮廓,影响无人机识别路径进行调控的过程,所以,在此提出了一种基于光电监测分析的无人机遇阻动态调控装置系统。
技术实现思路
1、本发明的目的是为了解决现有技术中存在光线条件不佳时,设备可能无法准确捕捉障碍物的特征和轮廓的缺点,而提出的一种基于光电监测分析的无人机遇阻动态调控装置系统。
2、为了实现上述目的,本发明采用了如下技术方案:
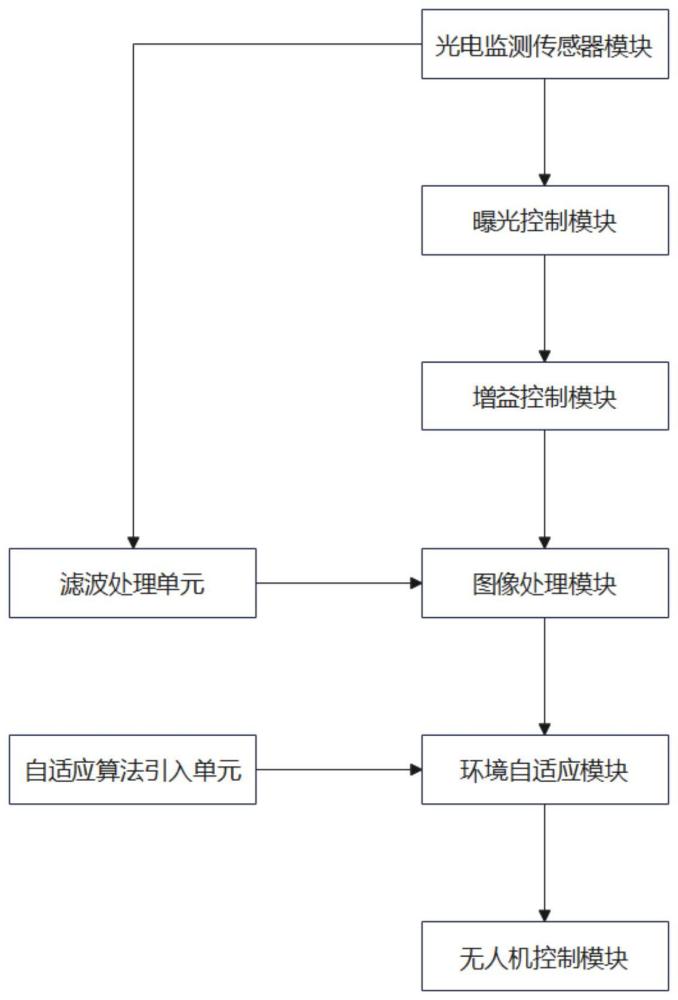
3、一种基于光电监测分析的无人机遇阻动态调控装置系统,动态调控模块包括:
4、光电监测传感器模块:用于捕获环境中的光信号,并将其转换为数字图像数据供系统处理;
5、曝光控制模块:负责调节光电监测传感器的曝光参数,在不同光线条件下获取适当曝光的图像;
6、增益控制模块:调节传感器的增益,在光线较暗的情况增强图像的亮度和对比度;
7、图像处理模块:对传感器采集到的图像数据进行障碍物识别、跟踪算法引入;
8、环境自适应模块:根据实时光线条件和环境反馈,动态调整遇阻动态参数;
9、无人机控制模块:基于自适应模块指令执行无人机的实时遇阻调节。
10、光电监测传感器模块中设置有立体视觉传感器,光电监测传感器模块使用cmos传感器捕获环境光信号,进行去噪、增强对比度、颜色空间转换预处理,处理后对光信号进行a/d转换,经过a/d转换后成为数字信号,将数字信号采集到系统中,进行图像处理,处理后的图像数据输出为数字图像。
11、曝光控制模块基于光电监测传感器模块输出的图像亮度信评估当前环境的光照水平,同时进行自动曝光控制,动态调整传感器关键参数,快门速度、光圈大小以及i so感光度,控制快门速度决定感光元件暴露在光源下时间的长短,控制光圈越大,进光量越多,反之越少,在无法改变快门速度和光圈的情况下,提高iso值增加传感器对光的敏感度,并采用高动态范围成像技术,连续拍摄几张不同曝光程度的照片,合成一张既有亮部细节又有暗部细节的完整图像,控制图像曝光度。
12、增益控制模块基于光电监测传感器模块的数字图像信号进行初步放大,设定原始光电流为iph,增益为g,放大后的模拟信号为vout,改变像素内放大器的增益直接提升信号强度,预放大后的信号沿着像素列向下传输到列放大器,对整列像素的信号进行二次放大,原始光电流iph由像素感应到的光强度产生的,增益g为预放大器和列放大器提供的总的放大倍数,放大后的模拟信号vout为:
13、vout=g×iph
14、增益后的最后vout通过adc进行完全数字化转换。
15、图像处理模块使用边缘检测将图像划分为前景和背景,突出显示潜在的障碍物区域后,提取障碍物的特征,应用模板匹配寻找图像中障碍物及其位置,结合传感器中立体视觉,对提取的特征进行分析,判断候选区域内有效障碍物,判断出障碍物后,维持对同一障碍物在连续帧中的位置和姿态的跟踪,在第一帧确定目标对象的位置和初始特征后,在后续帧中,提取目标候选区域的新特征,并与前一帧的目标特征进行匹配,计算特征之间的距离或相似度,基于前几帧的目标运动轨迹,建立运动模型预测当前帧目标的位置:
16、
17、
18、其中,为预测状态,ak为状态转移矩阵,bk为控制输入矩阵,uk为控制输入,zk为观测值,hk为观测矩阵,vk为观测噪声。
19、滤波处理单元通过直方图均衡化调整图像的亮度和对比度,将rgb值归一化到[0,1]区间,并将图像从rgb空间转换到hsv,利用sift算法找出图像中的关键点,训练的深度学习模型resnet提取高层抽象特征,然后剔除与识别任务关联性弱或冗余的特征,最后使用lda线性判别分析将高维特征投影到低维空间。
20、环境自适应模块中包括自适应算法引入单元,环境自适应模块构建尺度空间,设定原始图像大小,对每个尺度层上,进行关键点检测,在每个尺度层上,搜索候选关键点的邻域半径,筛选对比度高的候选关键点,边缘抑制阈值设置为10,抑制边缘附近的候选关键点,基于自适应算法引入单元基于环境自适应模块针对光照变化导致的物体大小变化,结合不同尺度的sift关键点,对远距离或强光下较小的障碍物,侧重高尺度层的sift关键点,对近距离或弱光下较大的障碍物,侧重较低尺度层的关键点。
21、无人机控制模块基于环境自适应模块对同一物理位置但不同尺度的关键点,提取其sift特征向量,进行加权合并,形成融合特征向量,进行特征匹配,识别出重复出现的特征点,即潜在的障碍物,根据匹配成功的特征点,得到障碍物在图像中的位置,并通过摄像头标定参数转换为无人机坐标系下的位置,然后对障碍物进行连续跟踪,更新其位置信息,根据识别和跟踪到的障碍物位置,结合无人机当前位置、速度、航向信息进行避障策略制定。本发明具备以下有益效果:
22、1、本发明中,通过远距离或强光下较小的障碍物侧重于较高尺度层,对于强光条件下图像出现的过曝区域,导致局部对比度降低的情况,高尺度层的关键点检测对低对比度特征有较好的容忍度,能在一定程度上补偿光照不均带来的影响,使得即使是强光下对比度减弱的小障碍物也能被有效识别,高尺度层的模糊处理有助于消除图像中的部分细节和纹理,减少无关背景信息的干扰,有助于无人机聚焦于潜在障碍物的关键特征,提高障碍物检测的准确性。
23、2、本发明中,通过近距离或弱光下较大的障碍物侧重于较低尺度层,对于在弱光条件下的整体图像亮度较低的情况,大尺寸障碍物通常仍具有相对较高的局部对比度,低尺度层对高对比度特征的响应较强,即使在光照不足的情况下也能有效地提取出这些障碍物的特征点,确保无人机在低照度环境中也能及时发现并规避障碍。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198136.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表