-
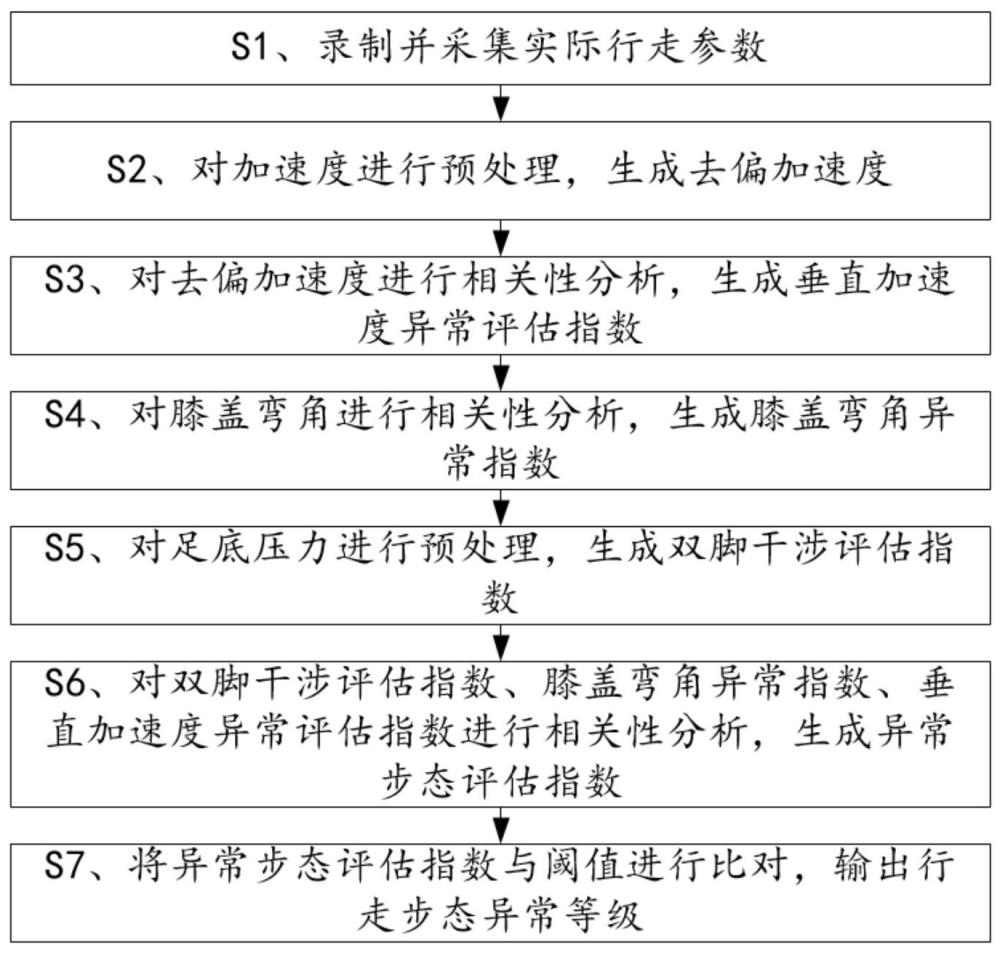
一种基于机器学习决策分类的异常步态检测方法及系统
本发明涉及异常步态检测,具体为一种基于机器学习决策分类的异常步态检测方法及系统。背景技术:1、异常步态是指个体在行走时表现出与正常步态显著不同的步态模式。这种步态的异常可能是由多种因素引起的,包括疾病......
-
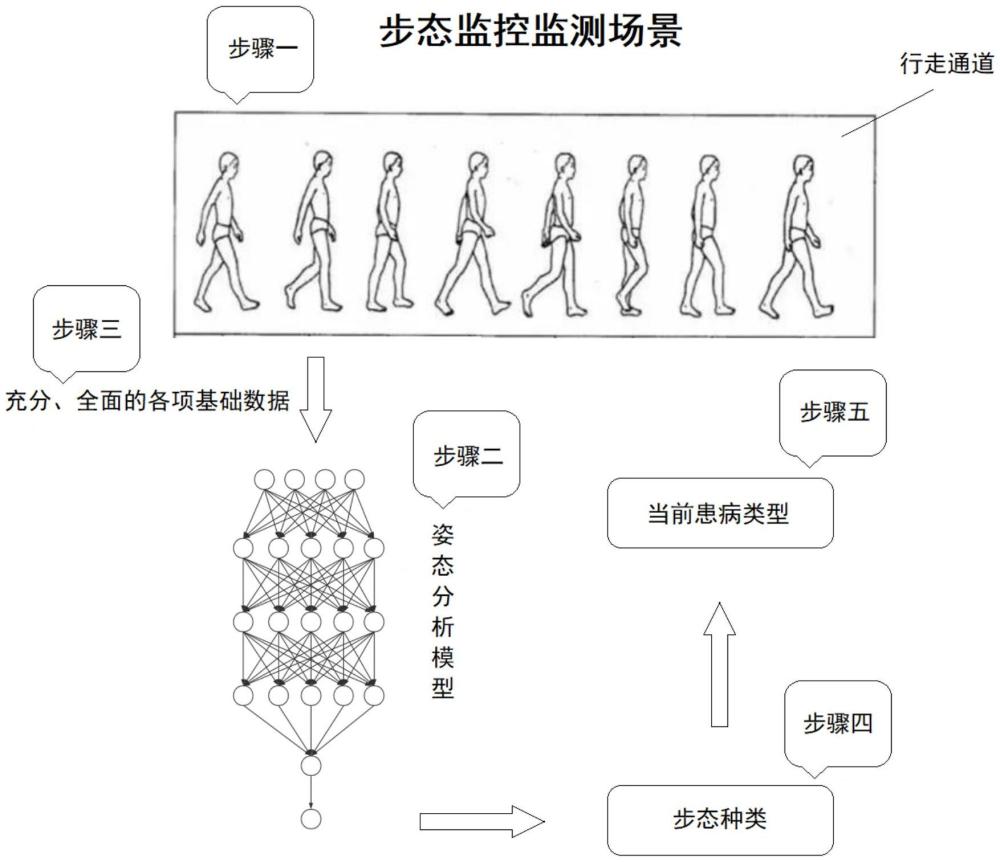
步态健康监测与分析方法及系统与流程
本发明涉及步态健康监测领域,尤其涉及一种步态健康监测与分析方法及系统。背景技术:1、每个人虽然都有自己独特的走路姿势,然而一些相同的步态仍能够反映出人们的身体问题,也就是说,从走路姿态可以看出一个人的......
-
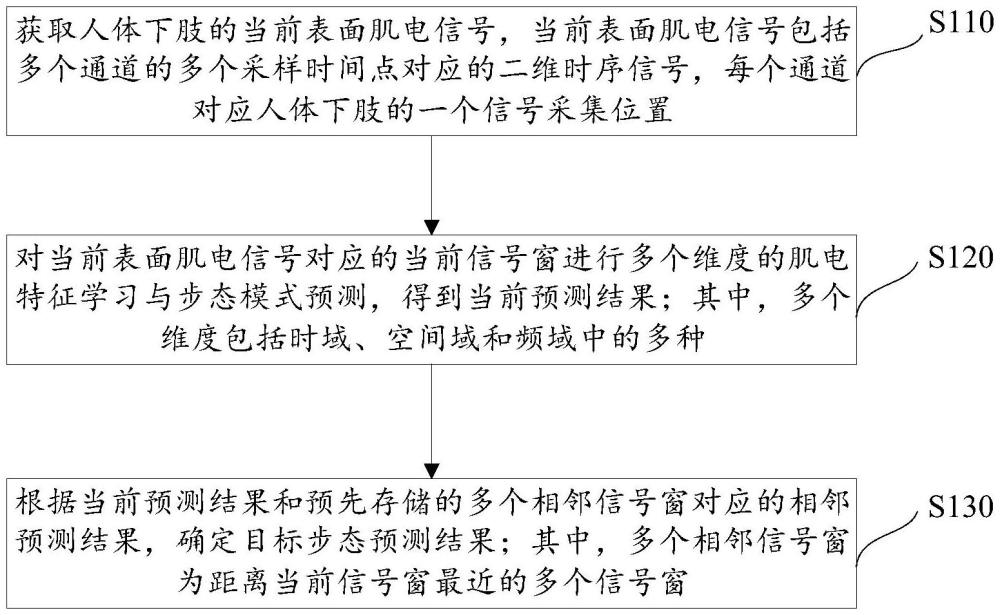
人体步态预测方法、装置、电子设备及存储介质
本发明涉及深度学习,尤其是涉及一种人体步态预测方法、装置、电子设备及存储介质。背景技术:1、基于医用机器人和外骨骼技术的持续进步,行走助力型外骨骼逐渐成为研究热点,并取得了不断的技术进步和应用拓展。综......
-
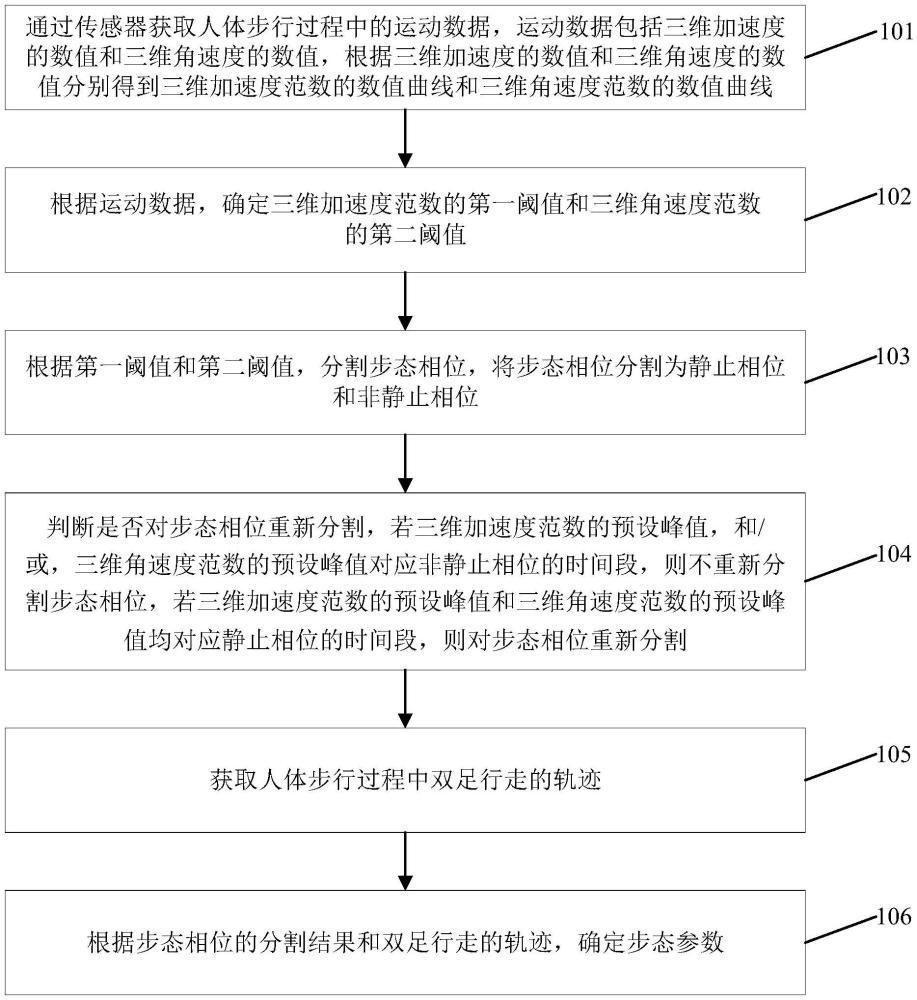
人体步态参数确定方法、装置、电子设备及存储介质
本公开涉及步态分析,尤其涉及一种人体步态参数确定方法、装置、电子设备及存储介质。背景技术:1、脑卒中仍然是一个巨大的全球性负担。脑卒中是全球致残的主要原因,80%以上的幸存者会出现平衡障碍,增加了他们......
-

一种基于TBE优化CNN-BiLSTM-Attention异常步态检测方法
本发明属于人工智能领域,具体涉及一种基于tbe优化cnn-bilstm-attention异常步态检测方法。背景技术:1、近些年以来,随着计算机和传感器技术的发展,生物特征识别技术日益兴起。步态作为生......
-
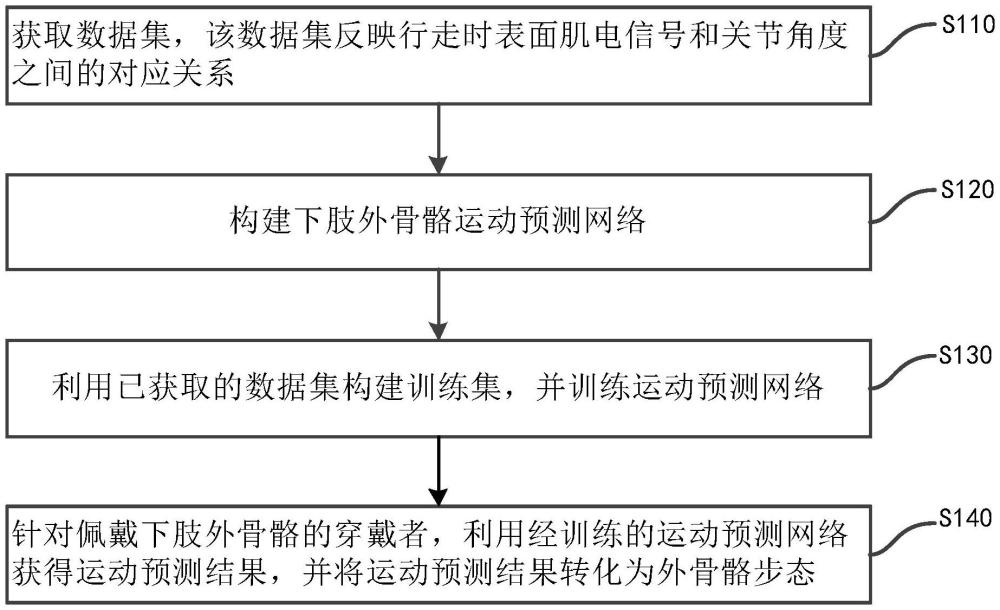
一种面向下肢外骨骼穿戴者的步态预测方法
本发明涉及机器人,更具体地,涉及一种面向下肢外骨骼穿戴者的步态预测方法。背景技术:1、下肢外骨骼机器人可以帮助偏瘫、四肢瘫、关节炎患者等运动障碍者尝试自主行走,在康复治疗中逐步恢复行走能力。下肢外骨骼......
-
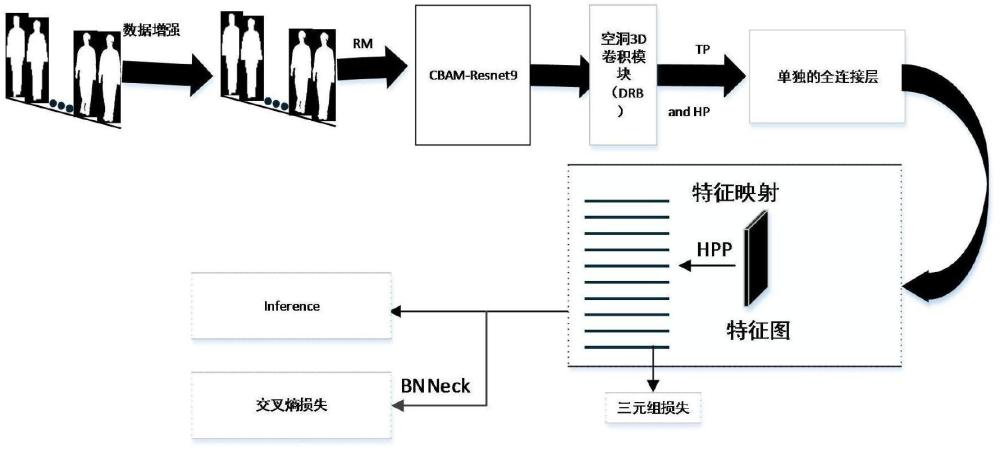
一种融合注意力机制和短期时序特征提取的步态识别方法
本发明属于计算机视觉中的视频图像处理和步态识别领域,涉及一种融合注意力机制和短期时序特征提取的步态识别方法。背景技术:1、步态识别是一种基于人体行走姿态独特性的生物识别技术。由于可以在远距离条件下捕捉......
-
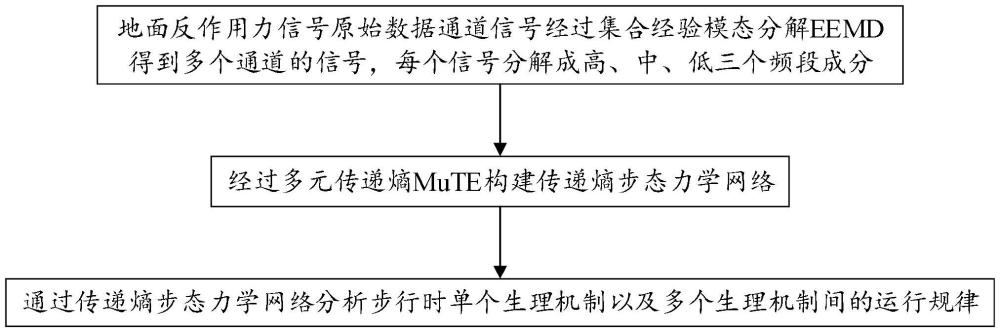
基于多元传递熵构建步态力学网络的分析方法
本发明涉及步态力学,具体地说,涉及一种基于多元传递熵构建步态力学网络的分析方法。背景技术:1、步态是进行日常生活活动和维持运动的基础。步态分析就是对人体步行时的姿态和行为特征进行研究,它涉及到髋、膝、......
-
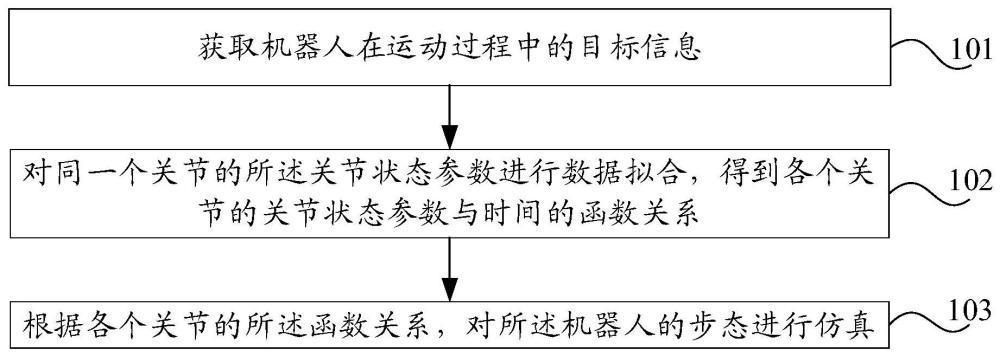
机器人步态仿真方法、装置、电子设备及存储介质与流程
本发明涉及人工智能,尤其涉及一种机器人步态仿真方法、装置、电子设备及存储介质。背景技术:1、机器人步态控制是指确定机器人各条腿的运动方式和步伐序列,以实现稳定、高效的移动。在进行步态规划时,需要考虑步......
-

一种老人步态改善助行器
本发明涉及助行器,特别涉及一种老人步态改善助行器,属于助行器。背景技术:1、助步器也叫下肢矫形器,是一种步行撑扶工具,供行动不便的老人、某些外伤、偏瘫患者与残疾人自行助步或四肢体力锻炼使用,人们扶着它......
-
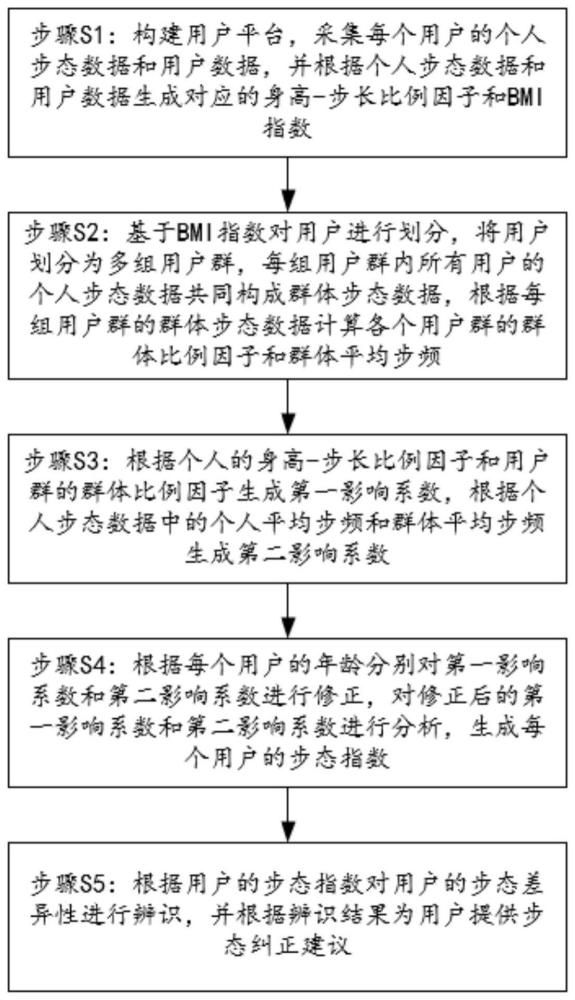
基于内外因多元融合的步态差异性辨识方法及系统
本发明涉及步态差异性辨识方法,具体为基于内外因多元融合的步态差异性辨识方法及系统。背景技术:1、步态分析被公认为人体运动研究领域的一种有效的评估方法,可以客观化运动行为。通过步态检测,能够分析人体的指......
-
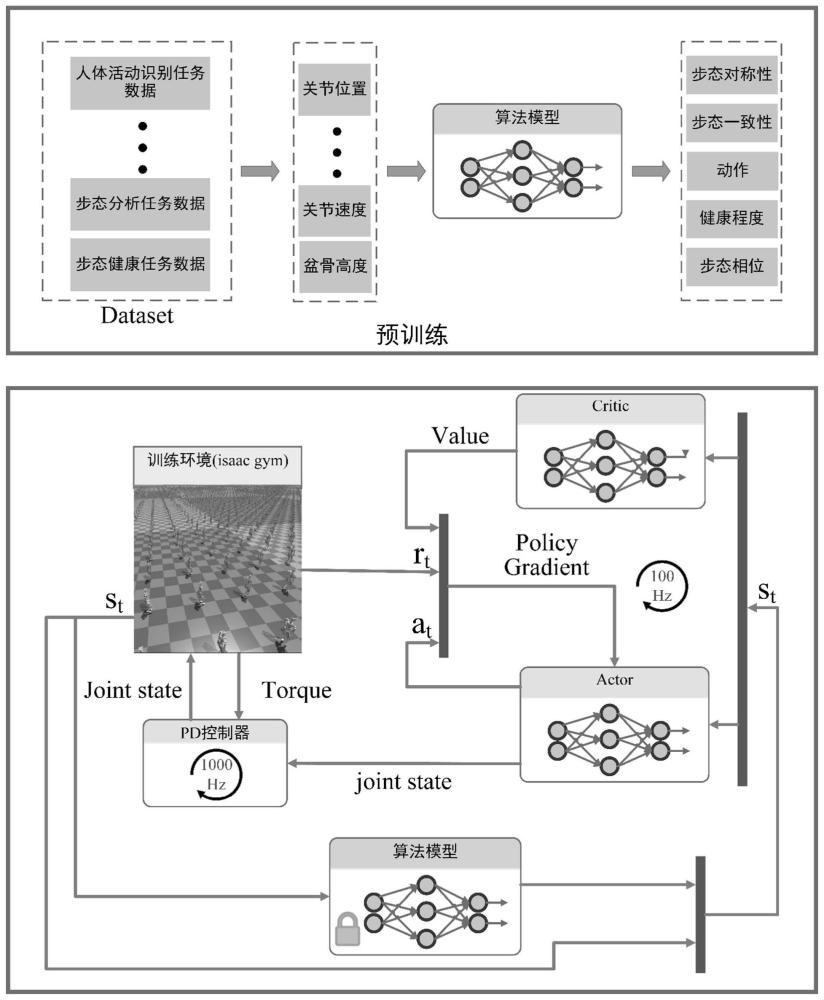
一种人形机器人步态分析与识别及机器人控制方法
本发明涉及机器人控制,尤其是涉及一种基于预训练模型的人形机器人步态分析与识别方法及机器人控制方法。背景技术:1、人形机器人能够适应室内环境和使用专为人类设计的工具,在家庭服务中具有广阔的应用前景。然而......
-
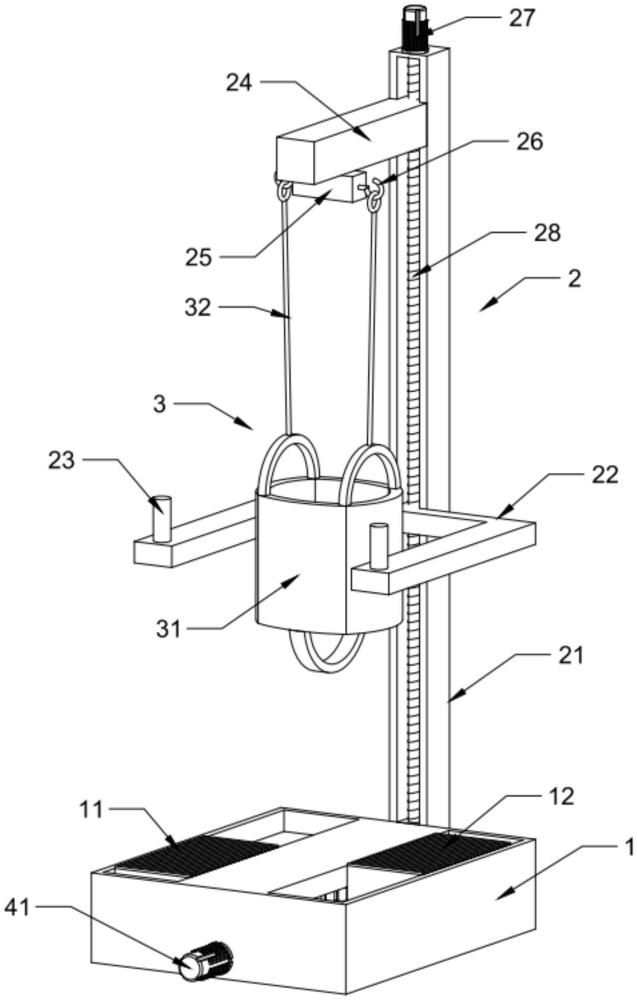
一种脑卒中患者康复训练步态辅助装置的制作方法
本技术涉及康复训练装置,具体为一种脑卒中患者康复训练步态辅助装置。背景技术:1、经检索,中国专利申请号为202223029387.2公开一种脑卒中患者康复训练用步态辅助装置,属于医疗器械技术领域,包括......
-

一种基于家族步态解析的拇外翻发病机制研究方法
本发明属于康复医疗领域,涉及步态分析和医学诊断,特别涉及一种拇外翻发病机制研究方法。背景技术:1、拇外翻是一种典型的肌肉失调、骨骼畸形疾病,其特征是第一跖趾关节向外偏斜超过正常生理范围,跖骨头突出,呈......
-
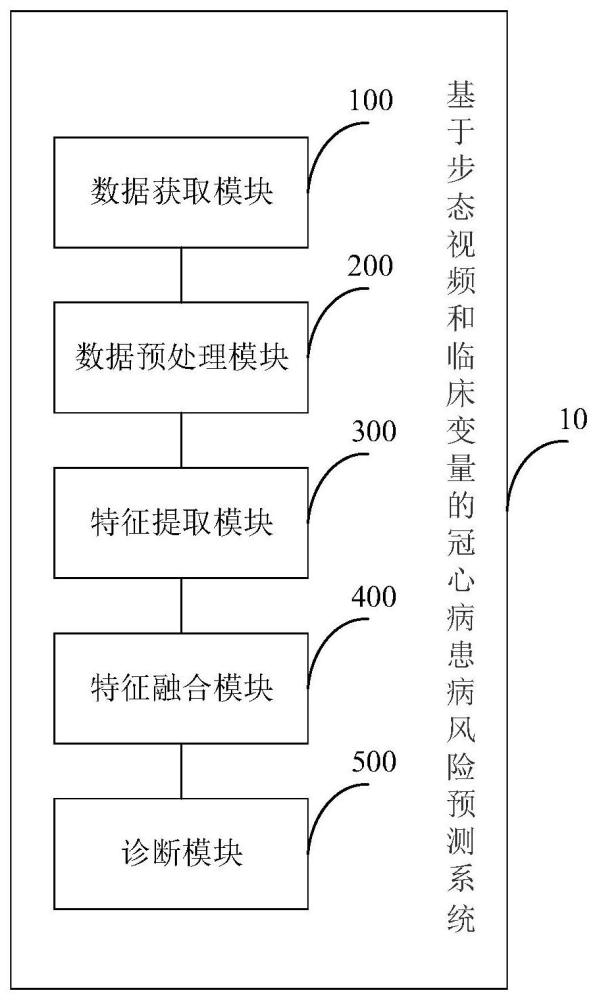
基于步态视频和临床变量的冠心病患病风险预测系统
本申请涉及临床医学,特别涉及一种基于步态视频和临床变量的冠心病患病风险预测系统。背景技术:1、传统的临床检查方法存在诸多缺陷,如侵入性操作和低准确性等。其中,冠心病(coronary artery d......
-
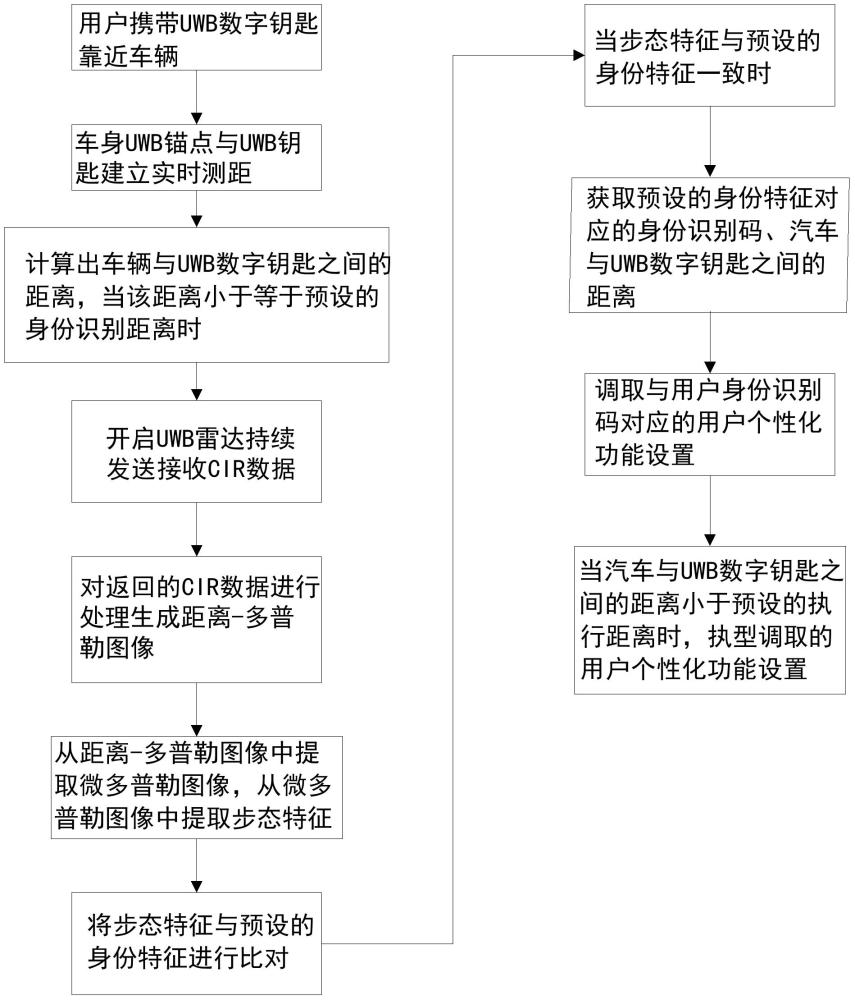
一种基于UWB步态识别的汽车个性化设置系统及方法与流程
本发明涉及汽车应用领域,具体涉及一种基于uwb步态识别的汽车个性化设置系统及方法。背景技术:1、随着人们对生活舒适度要求越来越高,汽车作为重要的交通工具,人们对于车内的舒适环境的要求也越来越高,尤其是......
-
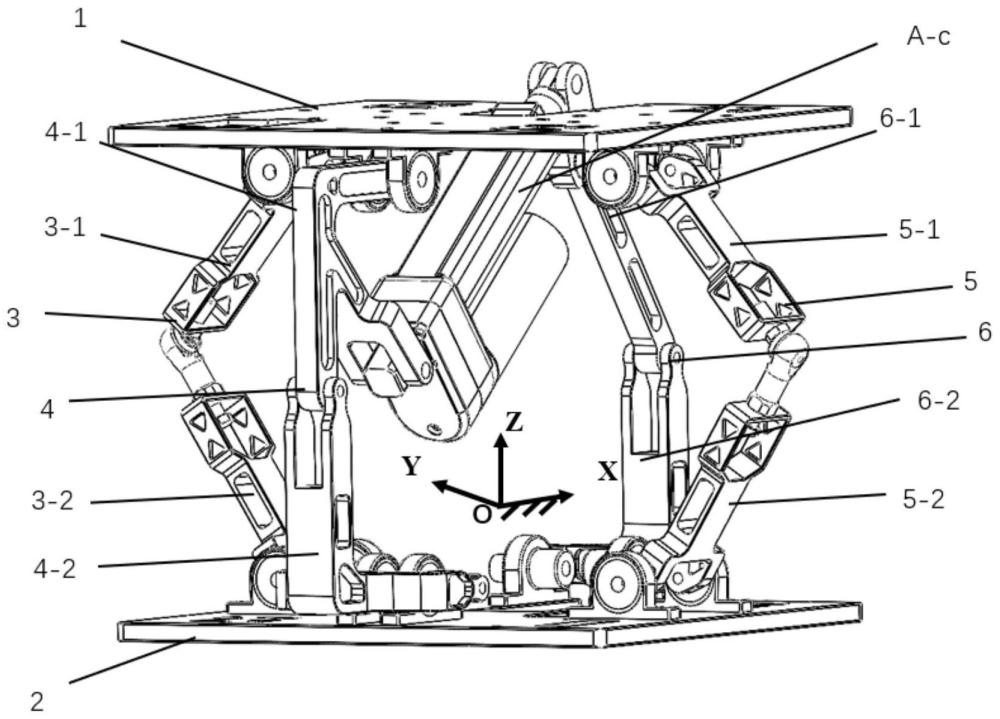
一种姿态-刚度-步态一体化可重构关节机构
本发明涉及一种姿态-刚度-步态一体化可重构关节机构,具体的讲是一个具有旋转以及平移两个自由度的可重构关节机构;两个自由度中:一是通过外部的激励实现其减振功能、二是通过主动推杆实现其俯仰姿态调节功能;本......
-
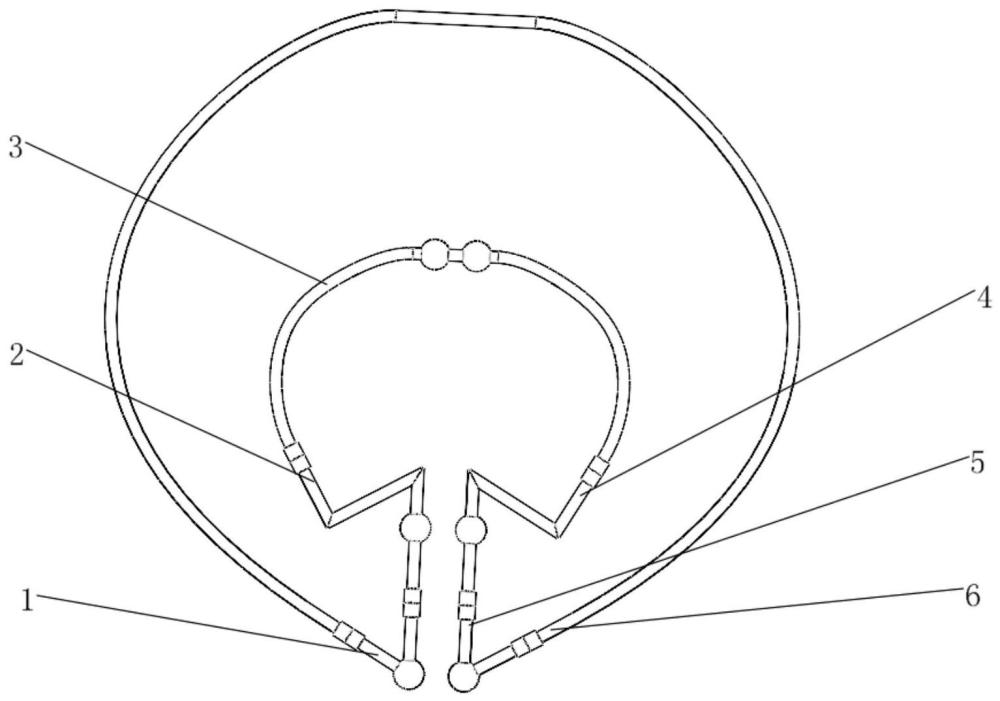
基于双球面6R的多步态移动机器人
本发明涉及一种基于双球面6r的多步态移动机器人,具体涉及一种以空间六杆双球面机构为基础的,通过利用驱动电机的正反转驱动机构前行及转向的基于双球面6r的多步态移动机器人。背景技术:1、当前,地面移动机器......
-
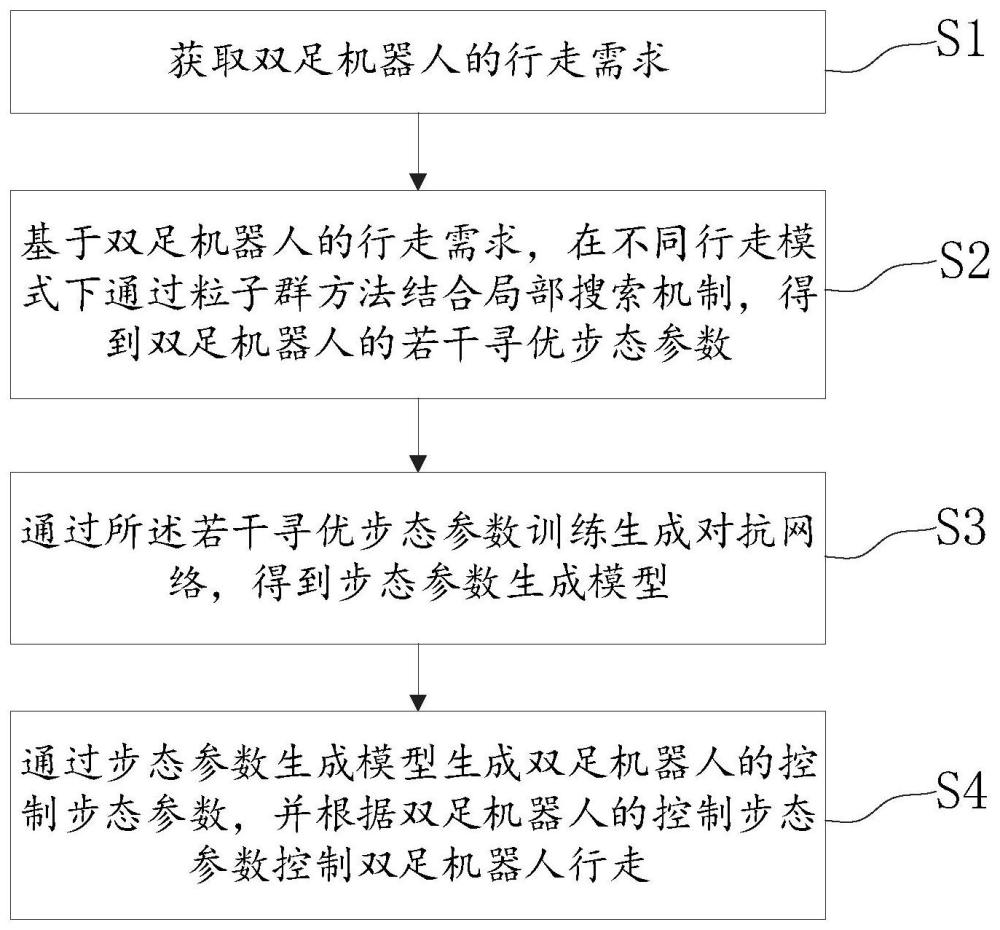
双足机器人最优步态控制方法、系统、设备及存储介质
本发明属于机器人智能控制领域,涉及一种双足机器人最优步态控制方法、系统、设备及存储介质。背景技术:1、近年来,双足机器人领域进行了大量的研究。早期的双足行走属于步行速度非常低的静态行走。在静态行走过程......
-

一种基于事件触发的六足巡检机器人步态规划方法与流程
本发明涉及巡检机器人步态规划,具体为一种基于事件触发的六足巡检机器人步态规划方法。背景技术:1、风能,作为一种清洁能源,正在成为人类最重要的能量来源之一,产生风能的设备,风发电机越来越多地被安装和使用......
-
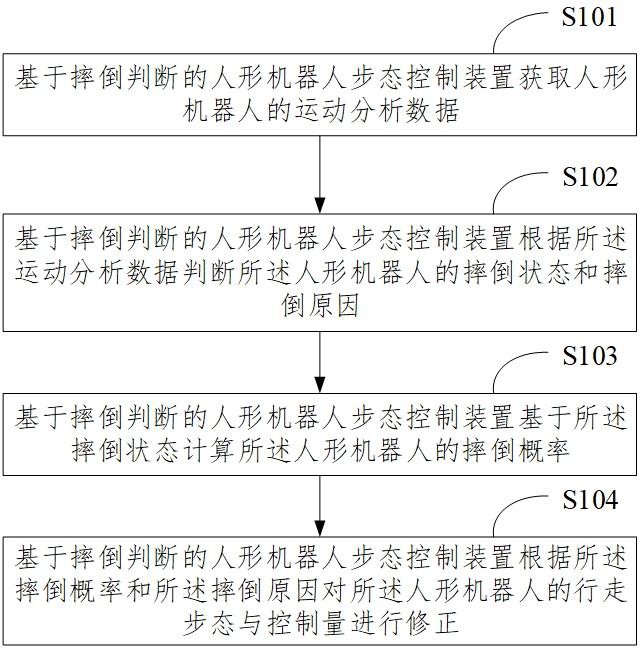
基于摔倒判断的人形机器人步态控制方法和装置
本发明涉及机器人控制,尤其涉及一种基于摔倒判断的人形机器人步态控制方法和装置。背景技术:1、双足人形机器人具有灵活的行走能力,能适应各种地形,具备较强的越障能力,这些优点使人形机器人能更好的适应未知环......
-

一种足式机器人的Spiking-CPG步态控制系统
本发明涉及仿生机器人,尤其是涉及一种足式机器人的spiking-cpg控制系统。背景技术:1、随着科学技术的飞速发展,生活中的智能化程度迅速提高,更多类型的仿生机器人的出现和发展。研究人员旨在改进这些......
-
双足机器人的平地步态优化方法及系统
本发明涉及机器人控制,具体为双足机器人的平地步态优化方法及系统。背景技术:1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。2、双足机器人,是指模仿人类双足行走方式的机器人,......
-
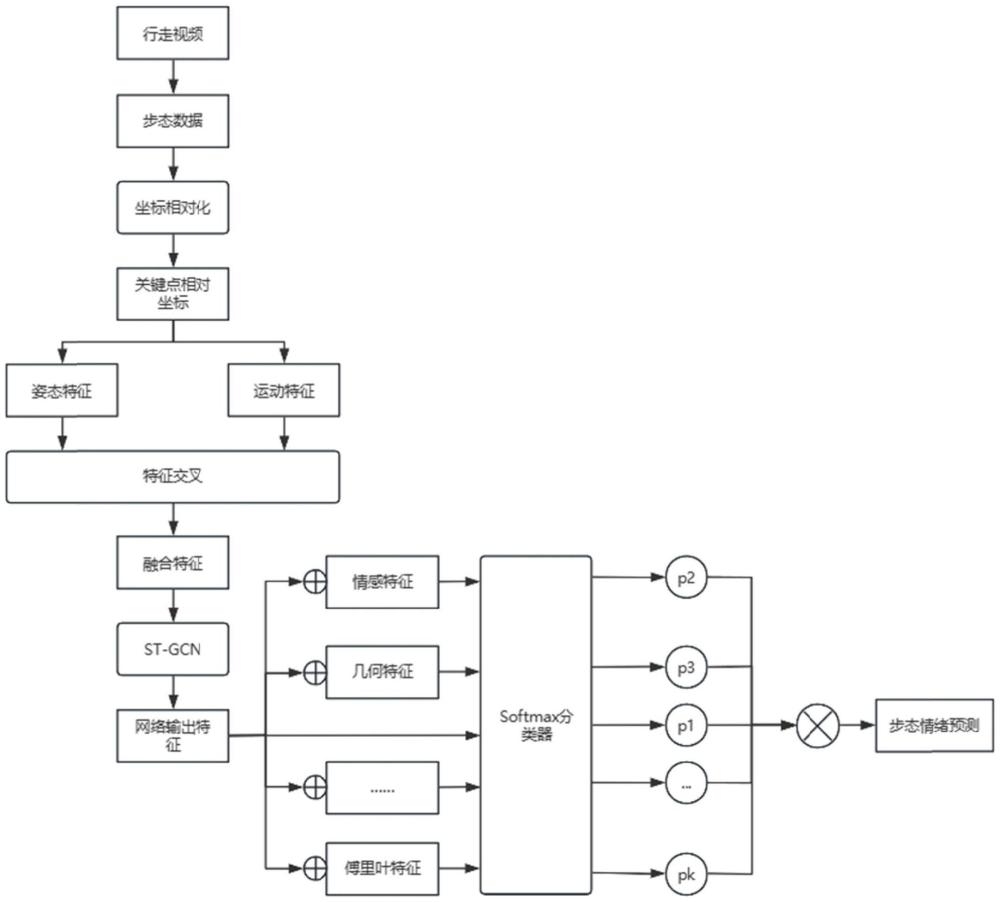
一种基于多头融合的步态情绪识别方法及系统与流程
本发明涉及人工智能,尤其涉及一种基于多头融合的步态情绪识别方法及系统。背景技术:1、感知人的情绪是智能交互和情感计算的重要部分,它涉及心理学、计算机科学和认知行为学等多个领域。情感识别可用于人机交互,......
-
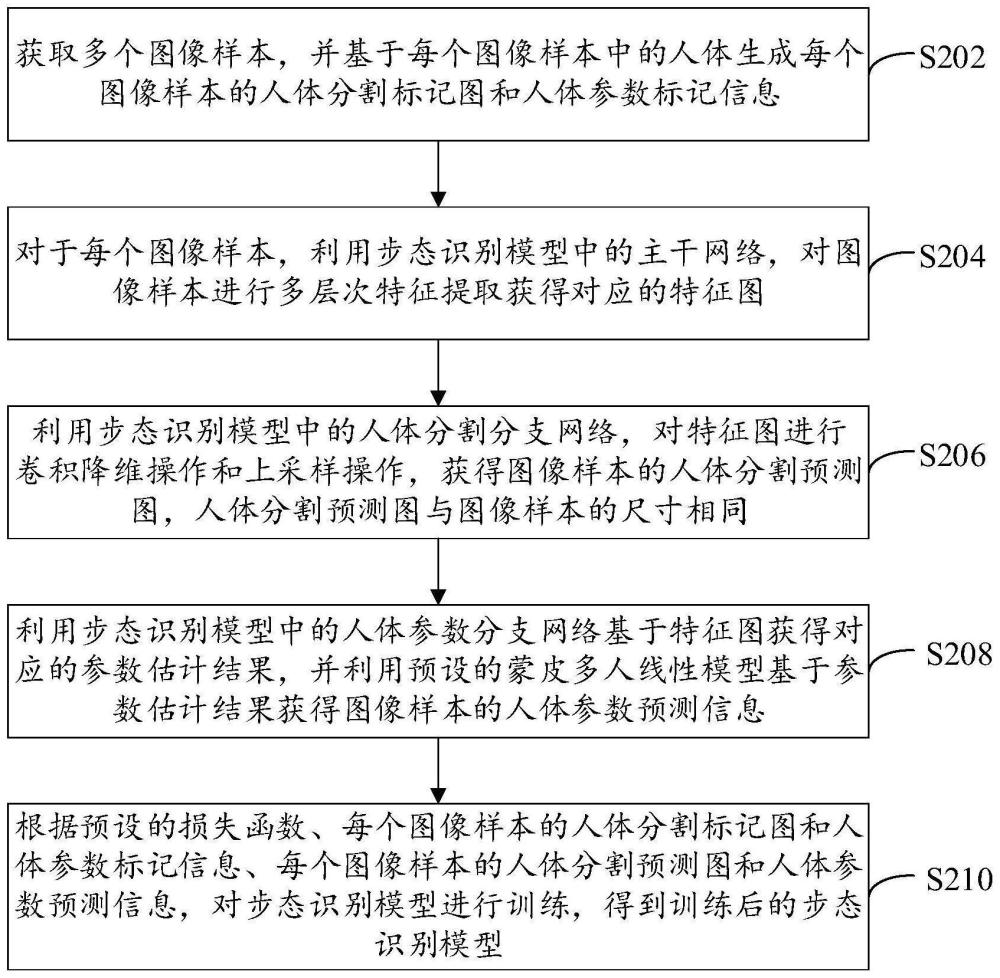
步态识别模型训练方法、人体步态识别方法及相关装置与流程
本发明涉及人工智能,具体而言,涉及一种步态识别模型训练方法、人体步态识别方法及相关装置。背景技术:1、步态识别是指将行人正常行走的姿态作为身份特征进行认证的技术,其与人脸、指纹、虹膜识别都属于生物特征......
技术新讯 > 步态 > 列表
 2024-11-21
2024-11-21精选技术
-

用于T梁转运的装置及方法与流程
2024-08-02 -

电流互感器的性能评估方法及系统与流程
2024-09-14 -

小数据传输失败报告的制作方法
2024-10-15 -

一种河道工程用河道清淤搅动装置的制作方法
2024-07-09 -

调控叶轮组的制作方法
2024-07-30 -

一种数据丢失情况下无人水面航行器的航向控制方法
2024-08-01 -

吊架及空铁交通系统的制作方法
2024-08-01 -

一种高低压气瓶组合的氮气推进系统的制作方法
2024-08-01 -

一种船体上层建筑分段建造工艺的制作方法
2024-08-01 -
电磁加热蒸汽发生器的制作方法
2024-08-01