一种姿态-刚度-步态一体化可重构关节机构
- 国知局
- 2024-08-01 08:19:04
本发明涉及一种姿态-刚度-步态一体化可重构关节机构,具体的讲是一个具有旋转以及平移两个自由度的可重构关节机构;两个自由度中:一是通过外部的激励实现其减振功能、二是通过主动推杆实现其俯仰姿态调节功能;本发明作为中间连接机构,来减小由于下部分机构带来的运动波动,在兼顾运动稳定性的同时实现俯仰姿态调节;具体是:在主动推杆锁死的情况下,该发明只具有上下平移运动的自由度,通过外部激励来实现其减振的功能;在主动推杆释放的情况下,该发明能够改变连接的两平台之间的姿态角。
背景技术:
1、目前市面上常用的移动机器人包括轮式、履带式、足式机器人;轮式、履带式移动机器人结构、控制简单但是机动性受到一定限制;腿足式机器人与地面是离散接触、能够适应更加复杂的路况。本专利基于一种闭链式腿足机器人,该机器人在砾石路、坡地、泥泞路、壕沟、草地等路况进行工作并且可以载人行走。由于该步行平台质心波动较大、行驶稳定性较差,足端轨迹并不足以越过一些较高的路障,采用一种姿态-刚度-步态一体化可重构关节机构来提高该步行平台的行驶平顺性并满足越障的需求。
技术实现思路
1、本发明要解决的是闭链多足移动平台行驶过程中质心波动较大、行驶稳定性较差以及足端轨迹并不足以越过一些较高的路障的问题。一种姿态-刚度-步态一体化可重构关节机构通过平面串联闭链五杆单元与空间并联单元进行耦合从而实现旋转以及平移两个自由度运动以解决上述问题。
2、本发明的技术方案:
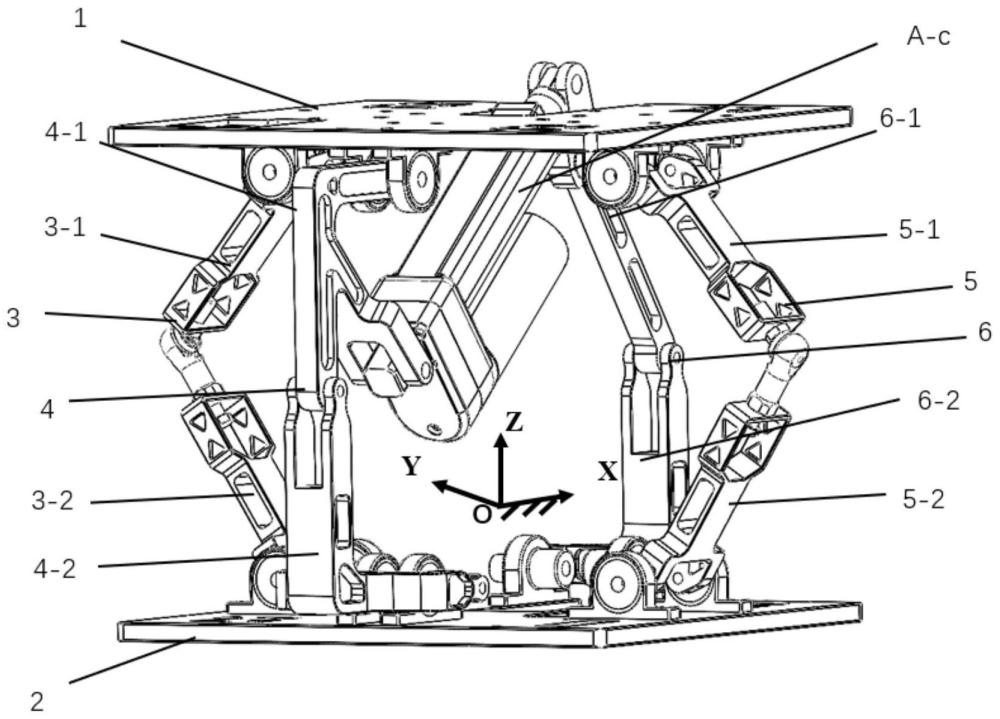
3、一种姿态-刚度-步态一体化可重构关节机构由定平台1、动平台2和运动支链组成,所述动平台2通过4条运动支链与所述定平台1进行转动连接;
4、并联单元由3支链、4支链、5支链、6支链组成,闭链五杆单元由7支链组成,各支链组成详见具体实施方式;如图3所示;
5、第3支链与第5支链的杆件组成、杆件形状、机械结构、装配方式以及与机架安装方式相同。
6、本发明利用闭链五杆机构的特性来限制并联单元的运动,并应用于多足移动平台。在并联单元中,外部激励作为主动力,此时并联单元的运动是不规则的,锁死闭链五杆机构,由于闭链五杆机构运动特性,限制并联单元中的两个平台在某个范围内只能进行上下的运动。当释放闭链五杆机构,其可以在一定的范围空间下改变两平台之间的运动姿态角,使得该平台能够进行自主调姿越障,从而提升了该多足移动平台的地形适应性能。
技术特征:1.一种姿态-刚度-步态一体化可重构关节机构,其特征在于:
2.根据权利要求1所述的一种姿态-刚度-步态一体化可重构关节机构,其特征在于:
3.根据权利要求1所述的一种姿态-刚度-步态一体化可重构关节机构,其特征在于:
技术总结一种姿态‑刚度‑步态一体化可重构关节机构,该装置包括:定平台1,动平台2,以及第一至第七运动支链(3,4,5,6,7)组成;其中存在支链7通过主动推杆作为驱动,实现机构的可重构姿态;姿态‑刚度‑步态一体化可重构关节机构适用于闭链腿足式移动平台,使闭链腿足式移动平台在运动过程中具有更好的行驶平顺性、地形适应性以及通过性能。技术研发人员:武建昫,赵顺卿,杨辉,唐绍斌,王志瑞,张文剑,李晔卓,姚燕安受保护的技术使用者:北京交通大学技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240722/231140.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表