一种基于UWB步态识别的汽车个性化设置系统及方法与流程
- 国知局
- 2024-08-02 17:08:38
本发明涉及汽车应用领域,具体涉及一种基于uwb步态识别的汽车个性化设置系统及方法。
背景技术:
1、随着人们对生活舒适度要求越来越高,汽车作为重要的交通工具,人们对于车内的舒适环境的要求也越来越高,尤其是对娱乐系统、舒适系统等与乘客切身体验相关的系统感受尤为重视。针对经常更换乘坐车辆的用户或者经常处在多人同乘驾驶场景的用户,因为经常需要重复调节舒适娱乐设置,降低了个人的乘坐体验。为了提高用户的乘坐体验,目前的做法是将车内的设置与用户的身份绑定,通过识别用户身份,对车内设置进行相应调整。
2、目前,关于用户身份识别主要有虹膜识别、人脸识别和步态识别几种。采用虹膜识别技术需要人脸对准虹膜识别器,身份识别距离短,需要强制要求人为配合,用户体验差。
3、采用人脸识别,需要将人脸近距离对准摄像头,同样需要强制人为配合,同时存在利用照片通过识别的安全隐患,且远距离无法识别。
4、采用基于摄像头的步态识别做远距离身份识别,虽然可以做到远距离识别,但是存在对摄像头清晰度要求高,在快视角、着装、携带物及环境等外在因素干扰的条件下,会造成步态轮廓不一致,造成误判,极大降低了识别的准确率。
技术实现思路
1、针对现有技术存在的问题,本发明的目的在于提供一种基于uwb步态识别的汽车个性化设置系统及方法,可以有效识别准确率,进而提高用户体验。
2、为实现上述目的,本发明采用的技术方案是:
3、一种基于uwb步态识别的汽车个性化设置系统,其包括uwb数字钥匙、uwb锚点、uwb雷达、数据处理模块和车身控制模块;
4、所述uwb数字钥匙供用户携带,用于与uwb锚点建立实时测距;
5、所述uwb锚点和uwb雷达安装在车身上,且均与数据处理模块连接;所述uwb锚点用于向数据处理模块发送uwb锚点与uwb数字钥匙之间的距离信息;所述uwb雷达则用于发送和接收持续的cir脉冲,并向数据处理模块发送接收到的cir脉冲数据;
6、所述数据处理模块用于接收uwb锚点发送的uwb锚点与uwb数字钥匙之间的距离信息,并计算出汽车与uwb数字钥匙之间的距离,然后将汽车与uwb数字钥匙之间的距离与预设的身份识别距离比较,当汽车与uwb数字钥匙之间的距离小于等于预设的身份识别距离时,数据处理模块控制uwb雷达开启,发送和接收持续的cir脉冲;
7、所述数据处理模块还用于接收uwb雷达发送的cir脉冲数据,并将cir脉冲数据进行傅里叶变换得到距离-多普勒图像,然后从距离-多普勒图像提取微多普勒图像,接着从微多普勒图像中提取方向梯度图特征方向梯度直方图特征,并将提取出的方向梯度直方图特征作为步态特征;最后,将步态特征与预设的身份特征进行对比,当两者一致时,数据处理模块将预设的身份特征对应的用户身份识别码、汽车与uwb数字钥匙之间的距离信息发送给车身控制模块;
8、所述车身控制模块根据用户身份识别码调取与该用户身份识别码对应的用户个性化功能设置,当汽车与uwb数字钥匙之间的距离小于等于预设的执行距离时,车身控制模块执行调取的用户个性化功能设置;
9、所述预设的用户身份特征、用户身份识别码以及用户个性化功能设置预先进行绑定并存储在数据库中。
10、所述数据处理模块获取步态特征的过程具体如下:
11、对cir脉冲数据进行采样得到adc数据,对adc数据每个chirp的采样点进行快时间维度fft,可获得距离-时间谱;对每个距离点的多个chirp的距离-时间谱再进行慢时间维度fft,即获得距离-多普勒谱;
12、对距离-多普勒谱进行恒虚警目标检测,对于检测出来的目标距离单元查找其距离-时间谱;累积tn时间内的距离-时间谱,对于同一距离单元进行短时傅里叶变换后得到一个横向为时间,纵向为多普勒信息的多普勒谱;对于多个距离单元,采用非相干叠加的方法得到最终的微多普勒谱图;
13、通过统计微多普勒谱图像局部区域的方向梯度直方图获得步态特征。
14、所述uwb锚点包括一个uwb主锚点和至少两个uwb从锚点,该uwb主锚点和和uwb从锚点均连接数据处理模块,所述uwb主锚点和从锚点用于发送接收测距信号并根据发送接收的信号时间戳计算各锚点与uwb数字钥匙之间的距离信息,然后将uwb主锚点、uwb从锚点与uwb数字钥匙的距离信息发送至数据处理模块,数据处理模块根据uwb主锚点、uwb从锚点与uwb数字钥匙的距离信息得到汽车与uwb数字钥匙的距离。
15、所述uwb数字钥匙与uwb锚点带有蓝牙功能,在启动测距功能之前,通过低功耗蓝牙完成两者的匹配和认证,完成认证后才启动测距功能;或者在完成认证后,在通过蓝牙自身rssi信号粗略测距,达到测距启动距离d1才开启uwb锚点和uwb数字钥匙之间的测距功能;当uwb数字钥匙离开车辆超过一定距离d2并保持一定时间t1后,关闭uwb锚点和uwb数字钥匙之间的测距功能。
16、所述用户个性化功能设置包括:仪表灯、氛围灯的灯光颜色调节和亮暗程度调节;车辆油门深度调节和油门响应时间调节;车辆个人文件夹和播放音乐列表设置;座椅姿态和高度调节以及方向盘角度和后视镜角度调节;安全带张紧力大小调节。
17、所述预设的用户身份特征、用户身份识别码以及用户个性化功能设置的预先绑定过程如下:
18、用户通过车端中控屏触发身份特征提取,uwb雷达启动,发射和接收cir脉冲;
19、用户携带uwb数字钥匙以正常行走的速度远离车辆到n米处,然后从n米处以正常行走速度靠近车辆;
20、数据处理模块对uwb雷达接收到的cir脉冲数据进行傅里叶变换得到距离-多普勒图像,然后从距离-多普勒图像提取微多普勒图像特征,接着从微多普勒图像中提取方向梯度图特征方向梯度直方图特征,并将提取出的方向梯度直方图特征作为用户身份特征;然后将提取到的用户身份特征与用户身份识别码进行绑定并保存到数据库;
21、接着用户调节座椅、后视镜、方向盘、仪表灯、氛围灯、油门、安全带、中控屏;
22、将调节完成后的设置参数即用户个性化功能设置与用户识别码进行绑定。
23、一种基于uwb步态识别的汽车个性化设置方法,其包括以下步骤:
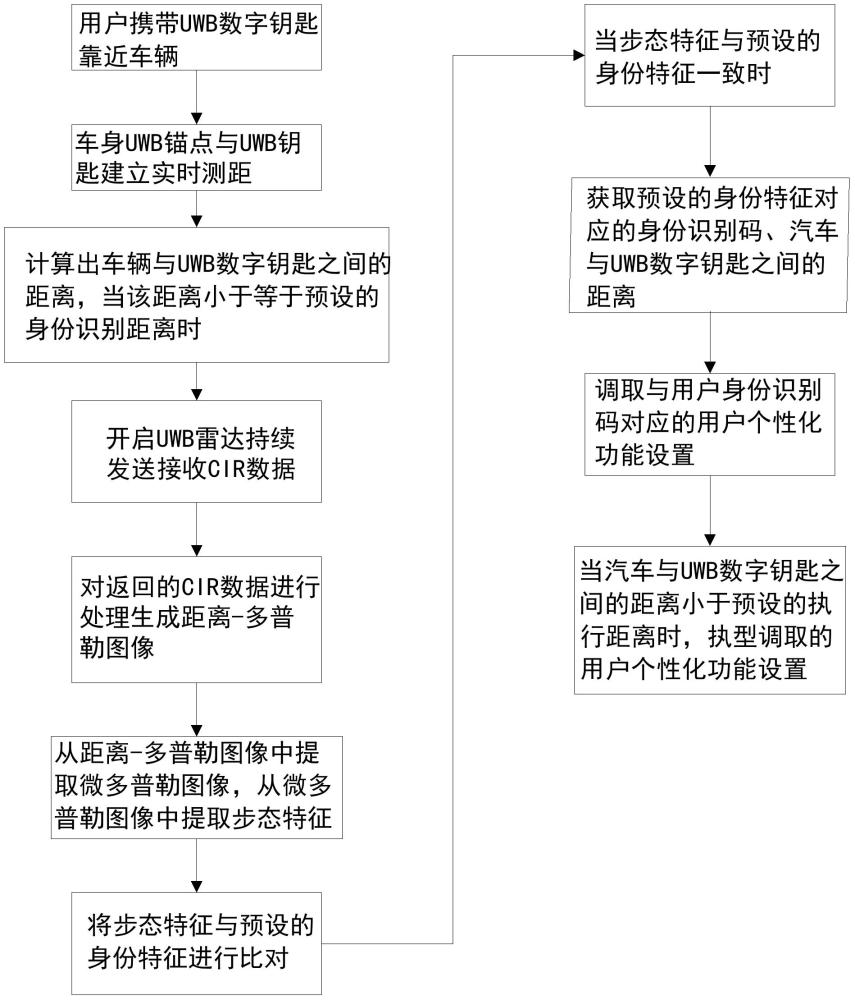
24、步骤1、用户携带uwb数字钥匙靠近车辆;车身上的uwb锚点与uwb钥匙建立实时测距,;
25、步骤2、根据uwb锚点与uwb数字钥匙之间的距离信息计算出汽车与uwb数字钥匙之间的距离,然后将汽车与uwb数字钥匙之间的距离与预设的身份识别距离比较,当汽车与uwb数字钥匙之间的距离小于等于预设的身份识别距离时,开启车身上的uwb雷达持续发送和接收cir脉冲;
26、步骤3、对uwb雷达接收的cir脉冲数据进行傅里叶变换,得到距离多普勒图像;
27、步骤4、从距离-多普勒图像提取微多普勒图像,然后从微多普勒图像中提取方向梯度图特征方向梯度直方图特征,并将提取出的方向梯度直方图特征作为步态特征;接着,将步态特征与预设的身份特征进行对比,当两者一致时,将预设的身份特征对应的用户身份识别码、汽车与uwb数字钥匙之间的距离信息发送给车身控制模块;
28、步骤5、车身控制模块根据用户身份识别码调取与该用户身份识别码对应的用户个性化功能设置;当汽车与uwb数字钥匙之间的距离小于等于预设的执行距离时,车身控制模块执行调取的用户个性化功能设置;
29、所述预设的用户身份特征、用户身份识别码以及用户个性化功能设置预先进行绑定并存储在数据库中。
30、所述步骤4获得步态特征的过程具体如下:
31、对uwb雷达的距离-多普勒谱进行恒虚警目标检测,对于检测出来的目标距离单元查找其距离-时间谱;累积tn时间内的距离-时间谱,对于同一距离单元进行短时傅里叶变换后得到一个横向为时间,纵向为多普勒信息的多普勒谱;对于多个距离单元,采用非相干叠加的方法得到最终的微多普勒谱图;
32、通过统计微多普勒谱图像局部区域的方向梯度直方图获得步态特征。
33、所述uwb锚点包括uwb主锚点和uwb从锚点,汽车与uwb钥匙之间的距离获取过程具体如下:
34、uwb主锚点发送接收测距信号并根据发送接收的信号时间戳计算uwb主锚点与uwb数字钥匙之间的距离信息;
35、uwb从锚点发送接收测距信号并根据发送接收的信号时间戳计算uwb从锚点与uwb数字钥匙之间的距离信息;
36、根据uwb主锚点、uwb从锚点与uwb数字钥匙的距离信息计算得到汽车与uwb数字钥匙的距离。
37、所述步骤1中,所述uwb数字钥匙与uwb锚点带有蓝牙功能,在启动测距功能之前,通过低功耗蓝牙完成两者的匹配和认证,完成认证后才启动测距功能;或者在完成认证后,在通过蓝牙自身rssi信号粗略测距,达到测距启动距离d1才开启uwb锚点和uwb数字钥匙之间的测距功能;当uwb数字钥匙离开车辆超过一定距离d2并保持一定时间t1后,关闭uwb锚点和uwb数字钥匙之间的测距功能。
38、所述用户个性化功能设置包括:仪表灯、氛围灯的灯光颜色调节和亮暗程度调节;车辆油门深度调节和油门响应时间调节;车辆个人文件夹和播放音乐列表设置;座椅姿态和高度调节以及方向盘角度和后视镜角度调节;安全带张紧力大小调节。
39、所述预设的用户身份特征、用户身份识别码以及用户个性化功能设置的预先绑定过程如下:
40、用户通过车端中控屏触发身份特征提取,uwb雷达启动,发射和接收cir脉冲;
41、用户携带uwb数字钥匙以正常行走的速度远离车辆到n米处,然后从n米处以正常行走速度靠近车辆;
42、数据处理模块对uwb雷达接收到的cir脉冲数据进行傅里叶变换得到距离-多普勒图像,然后从距离-多普勒图像提取微多普勒图像特征,接着从微多普勒图像中提取方向梯度图特征方向梯度直方图特征,并将提取出的方向梯度直方图特征作为用户身份特征;然后将提取到的用户身份特征与用户身份识别码进行绑定并保存到数据库;
43、接着用户调节座椅、后视镜、方向盘、仪表灯、氛围灯、油门、安全带、中控屏;
44、将调节完成后的设置参数即用户个性化功能设置与用户识别码进行绑定。采用上述方案后,本发明基于uwb身份识别对环境的依赖小,可以提高特定环境下身份识别的准确率,同时规避了通过图像识别存在个人隐私泄露的问题。而且,本发明的个性化设置自动识别回复,提高了用户使用汽车常用功能的体验感,结合汽车与人的互动功能,提供使用体验上不同用户的个性化区分。
本文地址:https://www.jishuxx.com/zhuanli/20240718/254355.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表