环视车辆外出辅助的制作方法
- 国知局
- 2024-08-02 17:08:31
背景技术:
1、车辆是日常生活的必需品。专用照相机、微控制器、激光技术和传感器可被用在车辆中的许多不同应用中。照相机、微控制器和传感器可被用于增强为顾客提供现有技术体验和服务的自动化结构,例如用于任务诸如车身控制、照相机视觉、信息显示、安全、自主控制等。另外,使用接近辅助的功能可被用于车辆或其占用者可能在停放、进入和离开车辆时需要辅助的情况。
2、车辆的停放可能提出许多挑战。驾驶员可能将车辆停靠得太靠近墙壁或邻近车辆而无法在不撞击障碍物(例如,墙壁或另一车辆)的情况下完全打开车门。另外,如果驾驶员尝试将车辆停放在具有路缘的道路上,则下面的情况是可能的:当占用者尝试离开车辆时,尤其是如果车辆位于使车辆还倾斜的斜坡上,打开车门可能撞到路缘。城市也可能管制街道上的停车,仅允许在某些时间停车。并且在某些区中停车也可能被禁止,例如,靠近消防栓。因此,期望的是为车辆占用者提供关于车辆周围的可能的障碍物的进出辅助。
技术实现思路
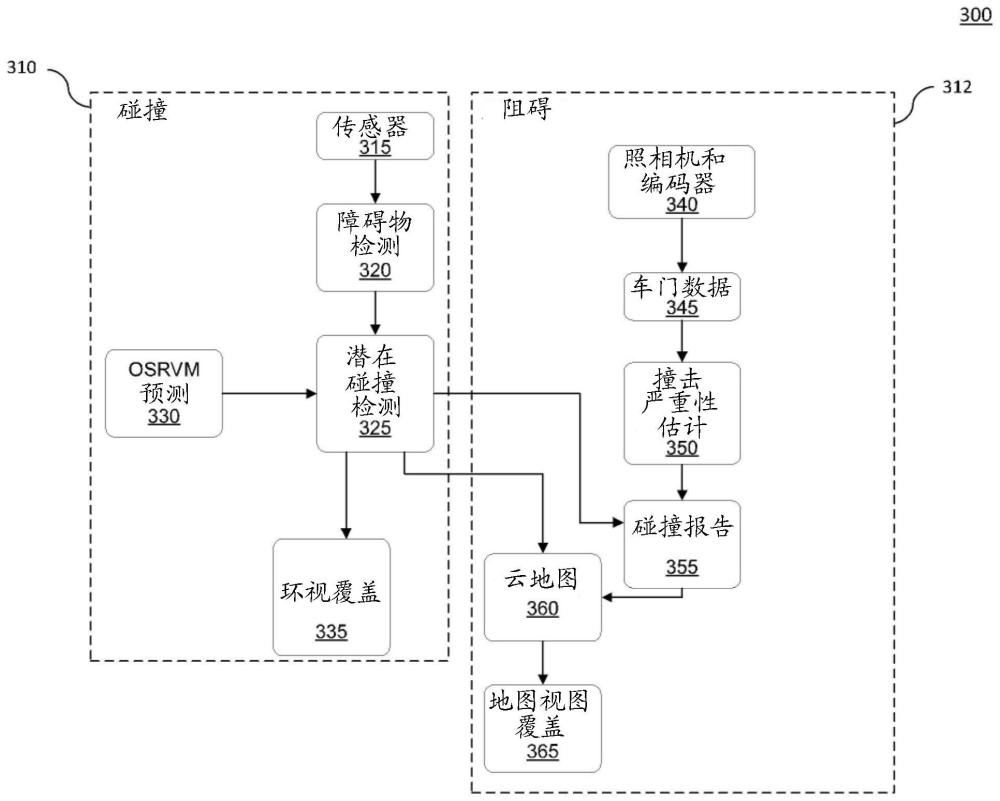
1、在本文中公开一种用于基于传感器数据的环视外出辅助的系统和方法。如在本文中所公开,一种用于环视外出辅助的系统可包括:车辆,具有传感器和控制器(例如微控制器、处理器或任何类型的计算装置),所述控制器可处理来自一个或多个传感器的数据。所述系统还可包括集成在车辆结构中的惯性测量单元或车辆遥感勘测单元,以收集并且处理车辆数据。另外,所述传感器可以能够检测障碍物,并且基于来自所述传感器的输入,所述控制器基于几何分析来预测车门的摆动路径以确定所述障碍物和所述车门之间的一个或多个潜在碰撞区。另外,基于来自惯性测量单元或来自车辆遥感勘测单元的数据(所述数据包括所述车门的速率、所述车门的重量和所述车门的位置),所述车门与所述障碍物的撞击的严重性的估计。
2、本公开的另一方面可以是一种系统,其中所述控制器可被用于确定所述车辆的坡度(bank)角,并且其中,基于至少所述坡度角,还预测所述一个或多个潜在碰撞区。
3、本公开的另一方面可以是一种系统,其中所述传感器可检测相邻路缘的颜色和高度。
4、本公开的另一方面可以是一种系统,其中所述传感器可检测所述车门和所述障碍物之间的物体冲撞。
5、本公开的另一方面可以是一种系统,其中基于来自所述惯性测量单元的数据,估计车门撞击严重性。
6、本公开的另一方面可以是一种系统,其中所述障碍物是邻近车辆的外后视镜。
7、本公开的另一方面可以是一种系统,其中所述传感器和控制器被用于检测并且确定所述外后视镜的地点。
8、本公开的另一方面可以是一种系统,其中所述传感器包括所述车辆的侧部上的照相机。
9、本公开的另一方面可以是一种系统,所述系统包括通信装置,所述通信装置可被用于访问云存储系统,所述云存储系统用以存储信息,诸如车门碰撞的发生、停车限制和路缘兼容性。所述信息的接收还可触发向所有者通知该信息的存在。另外,所述信息可被与其它车辆共享,所述其它车辆包括未装备有用于检测这种信息的传感器和处理器的车辆。
10、本公开的另一方面可包括一种用于环视外出辅助的方法。所述方法可包括:由车辆中的传感器检测车门的摆动路径中的障碍物。所述方法还可包括:基于几何分析,预测所述障碍物和所述车门之间的一个或多个潜在碰撞区。通过基于来自惯性测量单元的数据或来自车辆遥感勘测单元的数据(所述数据包括所述车门的速率、所述车门的重量和所述车门的位置)来估计所述车门与所述障碍物的撞击的严重性,所述方法可继续。
11、所述方法的另一方面可包括:确定所述车辆的坡度角,并且基于至少所述坡度角,还预测所述一个或多个潜在碰撞区。
12、所述方法的另一方面可包括:检测相邻路缘的颜色和高度。
13、所述方法的另一方面可包括:检测所述车门和所述障碍物之间的物体冲撞。
14、所述方法的另一方面可包括:基于来自所述惯性测量单元或来自车辆遥感勘测单元的数据(所述数据包括所述车门的速率、所述车门的重量),估计车门撞击严重性。
15、所述方法的另一方面可包括:所述障碍物是邻近车辆的外后视镜。
16、所述方法的另一方面可包括:确定所述外后视镜的地点。
17、所述方法的另一方面可包括:所述传感器包括所述车辆的侧部上的照相机。
18、所述方法的另一方面可包括:使用通信装置,访问云存储系统,所述云存储系统用以存储包括车门碰撞、停车限制和路缘兼容性的信息。所述信息的接收还可触发向所有者通知该信息的存在。另外,所述信息可被与其它车辆共享,所述其它车辆包括未装备有用于检测这种信息的传感器和处理器的车辆。
19、所述方法的另一方面可包括:基于照相机图像运动来确定车门位置。
20、本公开的另一方面可包括一种用于产生环视外出状况的方法,所述方法可包括:基于障碍物和车门之间的潜在碰撞的几何分析,产生环视覆盖(overlay)。所述方法还可包括:基于所述障碍物和所述车门之间的所述潜在碰撞的所述几何分析,产生地图视图覆盖。所述方法还可包括:基于所述环视覆盖,显示所述潜在碰撞和多个车门锁销位置;并且基于所述地图视图覆盖,还显示一个或多个路缘兼容街道。
21、本公开的另一方面可以是一种用于环视外出辅助的系统,所述系统包括:车辆,包括传感器和控制器;和惯性测量单元,被集成在所述车辆中;其中所述传感器被配置为检测障碍物,并且基于来自所述传感器的输入,所述控制器被配置为基于几何分析来预测车门的摆动路径以确定所述障碍物和所述车门之间的一个或多个潜在碰撞区,并且其中,基于来自所述惯性测量单元的数据,所述控制器还被配置为估计所述车门与所述障碍物的撞击的严重性。
22、本公开的另一方面可以是一种系统,其中所述控制器被配置为确定所述车辆的坡度角,并且其中,基于至少所述坡度角,还预测所述一个或多个潜在碰撞区。
23、本公开的另一方面可以是一种系统,其中所述传感器被配置为检测相邻路缘的颜色和高度。
24、本公开的另一方面可以是一种系统,其中所述传感器还被配置为检测所述车门和所述障碍物之间的物体冲撞。
25、本公开的另一方面可以是一种系统,其中来自所述惯性测量单元的所述数据包括所述车门的速率、所述车门的重量和所述车门的位置。
26、本公开的另一方面可以是一种系统,其中所述障碍物是邻近车辆的外后视镜。
27、本公开的另一方面可以是一种系统,其中所述传感器和控制器被配置为检测并且确定所述外后视镜的地点。
28、本公开的另一方面可以是一种系统,其中所述传感器包括所述车辆的侧部上的照相机。
29、本公开的另一方面可以是一种系统,所述系统还包括:通信装置,被配置为访问云存储系统,所述云存储系统被配置为存储包括车门碰撞、停车限制和路缘兼容性的信息,其中所有者被通知所述信息,并且其中另外的车辆被准许访问所述信息。
30、本公开的另一方面可以是一种用于环视外出辅助的方法,所述方法包括:由车辆中的传感器检测车门的摆动路径中的障碍物;基于几何分析,由控制器预测所述障碍物和所述车门之间的一个或多个潜在碰撞区;并且基于来自惯性测量单元的数据,由所述控制器估计所述车门与所述障碍物的撞击的严重性。
31、本公开的另一方面可以是一种方法,所述方法还包括:确定所述车辆的坡度角,并且其中,基于至少所述坡度角,还预测所述一个或多个潜在碰撞区。
32、本公开的另一方面可以是一种方法,所述方法还包括:检测相邻路缘的颜色和高度。
33、本公开的另一方面可以是一种方法,所述方法还包括:检测所述车门和所述障碍物之间的物体冲撞。
34、本公开的另一方面可以是一种方法,其中来自所述惯性测量单元的所述数据包括所述车门的速率、所述车门的重量和所述车门的位置。
35、本公开的另一方面可以是一种方法,其中所述障碍物是邻近车辆的外后视镜。
36、本公开的另一方面可以是一种方法,所述方法还包括:确定所述外后视镜的地点。
37、本公开的另一方面可以是一种方法,其中所述传感器包括所述车辆的侧部上的照相机。
38、本公开的另一方面可以是一种方法,所述方法还包括:使用通信装置,访问云存储系统,所述云存储系统被配置为存储包括车门碰撞、停车限制和路缘兼容性的信息,并且向所有者通知所述信息,并且使所述信息可用于另一车辆。
39、本公开的另一方面可以是一种方法,所述方法还包括:基于照相机图像运动来确定车门位置。
40、本公开的另一方面可以是一种用于产生环视外出状况的方法,所述方法包括:基于障碍物和车门之间的潜在碰撞的几何分析,产生环视覆盖;基于所述障碍物和所述车门之间的所述潜在碰撞的所述几何分析,产生地图视图覆盖;基于所述环视覆盖,显示所述潜在碰撞和多个车门锁销位置;并且基于所述地图视图覆盖,显示一个或多个路缘兼容街道。
41、通过当结合附图和所附权利要求进行时的对用于执行本公开的说明性示例和模式的下面详细描述,本公开的以上特征和优点以及其它特征和伴随的优点将会容易清楚。此外,本公开明确地包括以上和以下呈现的元件和特征的组合和子组合。
本文地址:https://www.jishuxx.com/zhuanli/20240718/254345.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。